基于PID控制算法的主动式动力吸振器
2018-10-20贾富淳孟宪皆王琳燕
贾富淳,孟宪皆,王琳燕
(山东理工大学 交通与车辆工程学院,山东 淄博 255049)
基于PID控制算法的主动式动力吸振器
贾富淳,孟宪皆,王琳燕
(山东理工大学 交通与车辆工程学院,山东 淄博 255049)
在传统的动力吸振器和主系统之间添加作动器,采用PID控制器,根据主系统的位移反馈对作动器进行调节,从而达到主动控制的目的.首先推导了激振力和控制力对位移的传递函数;其次通过对电磁作动器与PID控制器的分析,得到了作动器和控制器的传递函数,建立了主动式动力吸振器控制系统模型;最后对控制系统进行了数值仿真,得到了主系统位移的频响函数曲线和在不同激励下主系统位移的响应曲线.分析表明:基于PID控制算法的主动式动力吸振器相比于被动式动力吸振器,具有更好的吸振效果和更宽的抑振带宽.
动力吸振器;主动控制;PID控制算法;频率响应
动力吸振器又称质量阻尼器,是一种常用的振动控制手段.传统被动式动力吸振器的吸振频带较窄,当激励频率偏离最优调谐频率时会再次产生大幅共振,而近年发展起来的主动式动力吸振器具有良好的抑振带宽和吸振效果[1-2].
主动式动力吸振器是在传统动力吸振器和主系统间添加一个主动作动器,根据外界激励频率的变化及控制算法,调整主动控制力,从而进一步提高动力吸振器的性能.有关学者提出了空气弹簧式[3]、电动式[4]、电磁式[5]、压电材料式[6]等不同工作原理的作动器.对于主动式动力吸振器的控制算法,也有学者做了大量的研究.文献[7]设计了一种用于船舶浮筏隔振系统,采用x-LMS控制算法对主动力进行控制,得到了很好的减振效果,文献[8]采用遗传算法对LQR控制系统的参数进行优化,经数值仿真表明,该方法有更好的控制效果,文献[9]提出一种基于ADC控制算法的主动式动力吸振器,用于控制空间桁架的振动,并对其进行了实验验证,文献[10]设计了一种变步长、双寻优的控制算法,文献[11]将PID控制算法应用于电磁式双层隔振系统.在众多算法中,PID算法的原理简单,成本低廉,是工程中应用最多的控制算法[12-14].
本文提出一种采用PID控制算法的电磁式主动动力吸振器,推导了主动式动力吸振器的传递函数,对主动式动力吸振器进行了仿真,验证了吸振效果.
1 运动微分方程建立
主动式动力吸振器的物理模型如图1所示.
图中m1为振动主系统的质量,k1和c1分别为主系统弹性元件的刚度和阻尼元件的阻尼系数,m2为动力吸振器的质量,k2和c2分别为动力吸振器的刚度和阻尼,主系统所受激振力为F,fc为施加在主系统与动力吸振器之间的主动控制力.
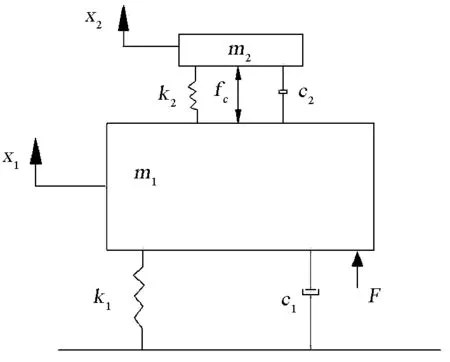
图1 主动式动力吸振器物理模型Fig.1 The model of active dynamic vibration absorber
系统的运动微分方程为

(1)
式中:
对于式(1)引入一个恒等式

(2)
将式(1)和(2)合并后整理,得到系统的状态空间方程:
(3)
(4)
式中:

对式(3)和(4)进行拉普拉斯变换后合并,可得
Y(s)=C(sI-A)-1BU(s)
(5)
式中:I为单位矩阵;s为拉普拉斯算子.
由式(5)可得F~x1的传递函数H1和fc~x1的传递函数H2.
(6)
(7)
2 主动式动力吸振器的设计
作动器与控制系统的设计是决定主动式动力吸振器吸振效果的关键,所以主动式动力吸振器的设计主要是选取合适的作动器并设计与之相匹配的控制算法.
2.1 作动器模型分析
作动器是主动控制系统中重要的元件,其作用是根据控制信号对系统施加控制力以改变系统响应.作动器按其工作原理可以分为两类,一类是根据材料的机敏性实现作用的作动器,另一类是根据结构机理实现的作动器.电磁作动器是一种基于磁力作用的新型作动器,具有响应快、无接触、控制力大的优点.电磁作动器可以简化为图2的模型[7].
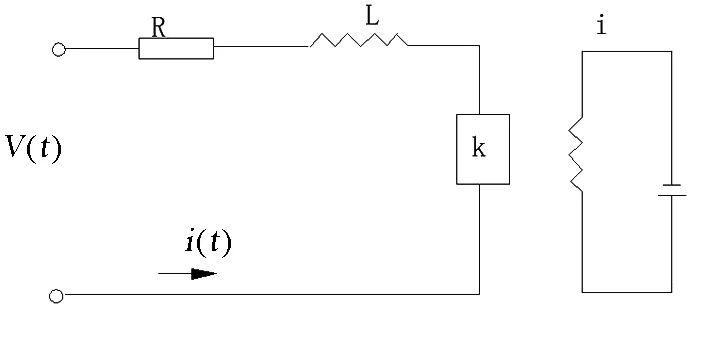
图2 电磁作动器模型Fig.2 The model of electromagnetic actuator
图2中:i(t)为控制电流,R为动圈电阻,L为动圈电压,V为控制电压,k为增益,将图2所示的作动器用数学关系式表示,得到
fc=ki(t)
(8)
(9)
对式(8)和(9)进行拉普拉斯变换,经过整理可得电磁作动器的传递函数H3(s).
(10)
2.2 控制系统的设计
由于具有结构简单、稳定性好、工作可靠、调整方便的优点,比例、积分、微分控制(又称PID控制)已成为工程实际中应用最广泛的控制规律.PID控制系统的原理如图3所示[9].

图3 PID控制系统原理图Fig.3 PID control system schematic
目前应用的PID控制器的的结构形式可以表示为

(11)
表示PID控制器的输出与误差e(t)的比例、积分和微分关系,其中:kp为比例常数,ki为积分,kd为微分常数[11].
由式(11)可以得到PID控制器的传递函数HPID(s).

(12)
建立基于PID控制算法的主动式动力吸振器的控制系统模型,如图4所示.
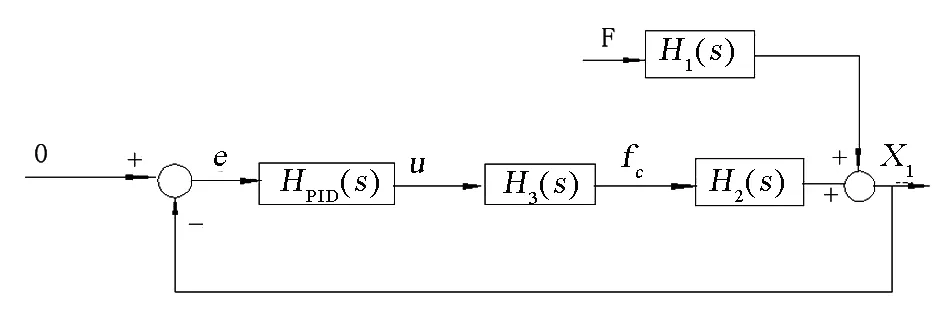
图4 主动式动力吸振器控制系统模型Fig.4 The model of active dynamic vibration absorber control system model
该控制系统中,激振力与主系统位移的传递函数F~x1为

(13)
3 控制系统仿真
利用数值分析软件matlab对基于PID控制算法的主动式动力吸振器控制系统进行数值仿真,得到主系统位移x1的幅频特性曲线,如图5所示.
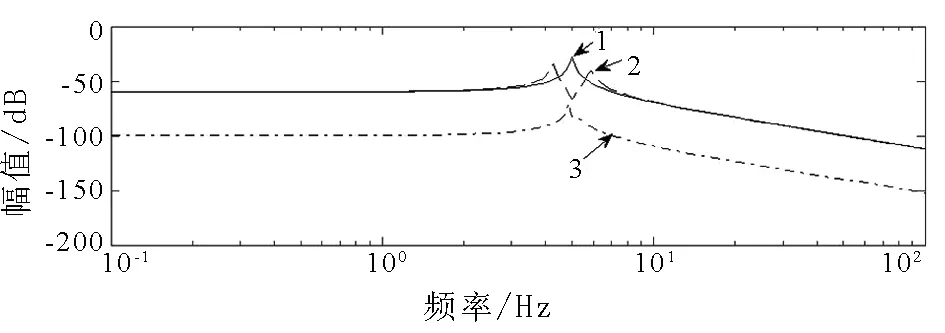
图5 幅频特性曲线Fig.5 The amplitude-frequency characteristic curve
如图5,曲线1为没有任何吸振设备时,主系统位移幅值随激励频率的变化曲线;曲线2为主系统附加传统的被动式动力吸振器时,主系统位移幅值随激励频率的变化曲线;曲线3为主系统附加基于PID的主动式动力吸振器时,主系统位移幅值随激励频率的变化曲线.对图5分析可得:传统的被动式动力吸振器可以对共振峰点附近的主系统振动进行有效的控制,但是附加动力吸振器后会引入两个新的共振峰值,抑振带宽较小;基于PID控制算法的主动式动力吸振器可以使主系统位移幅值在0.1~100Hz都有明显降低,最大的降幅接近50dB.
令F=sinωt(其中:ω为主系统的固有频率),经过matlab仿真可以得到:在正弦激励下,主系统位移x1随时间的变化曲线,如图6所示.
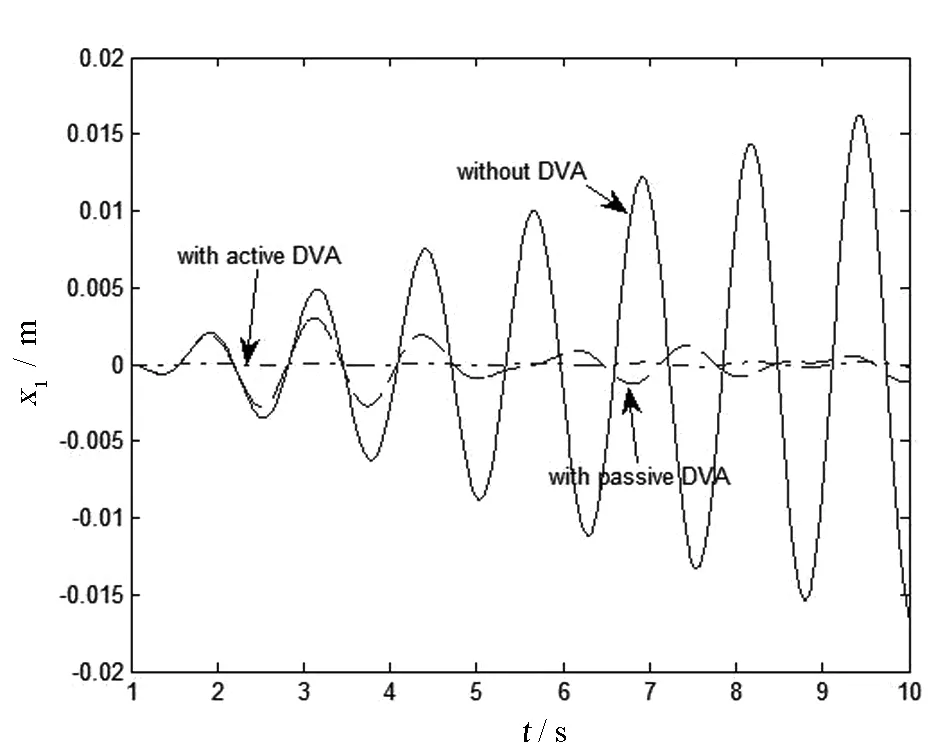
图6 正弦激励下的时域分析Fig.6 The time domain analysis under sinusoidal excitation
对图6分析可得:当主系统发生共振时传统被动式动力吸振器可以有效降低系统振动,主动式动力吸振器可以完全抑制主系统的振动,主系统的振幅基本为0.
对随机激励下的主系统的振动进行仿真分析,可以得到随机激励下主系统位移x1随时间的变化曲线,如图7所示.

图7 随机激励下的时域分析Fig.7 The time domain analysis under random excitation
分析可得:在随机激励下,动力吸振器可以有效降低主系统的振动;而基于PID控制算法的主动式动力吸振器可以使得主系统的位移x1接近于0,基本抑制了主系统的振动.
通过上述分析可知,基于PID控制算法的动力吸振器相较于传统的被动式动力吸振器对主系统的振动有更好的抑制作用,且在整个频率段都有很好的吸振效果,具有更大的抑振带宽.
4 结论
本文提出一种基于PID控制算法的主动式动力吸振器,分析其控制原理及控制效果,得到如下结论:
1)得到了主动式动力吸振器激振力和控制力对主系统位移的传递函数.
2)建立了主动式动力吸振器的控制模型,得到了控制系统中激振力对主系统位移的传递函数.
3)得到了主系统位移x1的频响函数曲线和在正弦激励与随机激励下的主系统位移x1的响应曲线.
4)基于PID控制算法的主动式动力吸振器的吸振带宽为0.1~100Hz,相较于被动式动力吸振器更宽.
[1]赵国迁.几种典型的主动控制动力吸振器[J].交通科技与经济,2006(5):80-82.
[2]陈自力,马傲玲,游晓良,等.主动式动力吸振器的振动控制研究[J].厦门理工学院学报,2012,20(3):67-70.
[3]靳晓雄,肖勇,蔺玉辉,等.空气弹簧半主动式动力吸振器的研究[J].中国工程机械学报,2007(3):253-257.
[4]张洪田,李玩幽,刘志刚.电动式主动吸振技术研究[J].振动工程学报,2001,14(1):113-117.
[5]孙志卓,王全娟,王付山.一种主动电磁式动力吸振器的研究与设计[J].振动与冲击,2006,25(3):198-201.
[6]KIM S,WANG S,BRENNAN M.Dynamic analysis and optimal design of a passive and an active piezo-electrical dynamic vibration absorber[J].Journal of Sound and Vibration,2011,330,603-614.
[7]敬刘凯,吴文伟,翁震平.带主动动力吸振器的浮筏隔振系统自适应控制仿真分析[J].船舶力学,2014,18(8):989-995.
[8]文岐华,左曙光.基于遗传算法和LQR的主动动力吸振器优化[J].佳木斯大学学报,2010,28(5):645-649.
[9]胡杰,牛红攀,张希农.具有粘弹性电磁式主动动力吸振器主动控制试验研究[J].实验力学,2006,21(6):735-740.
[10]杨恺,崔龙,黄海.主被动电磁式动力吸振器及其在桁架振动控制中的应用[J].振动与冲击,2012,31(18):14-19.
[11]闫立勋,周鸿,彭超,等.自适应主动共振吸振器的设计和减振性能研究[J].实验力学,2015,30(5):556-566.
[12]杨思俊. 采用PID控制的LED恒流源设计[J]. 微处理机,2017(2):82-85.
[13]王海荣. PID算法在温度控制系统中的Proteus设计与仿真[J]. 自动化与仪器仪表,2017(4):42-44.
[14]王洪亮,张庆渴,谷文豪,等. 基于PID控制的坡道起步控制仿真与试验研究[J]. 汽车工程,2017(4):480-485.
ActivedynamicvibrationabsorberbasedonPIDcontrolalgorithm
JIA Fu-chun,MENG Xian-jie,WANG Lin-yan
(School of Transportation and Vehicle Engineering, Shandong University of Technology, Zibo 255049, China)
An actuator is added between the conventional dynamic vibration absorber and the main system,using PID controller and according to the main system of displacement feedback to adjust the actuator to achieve the purpose of active control.First, the transfer function of the exciting force and the control force to the displacement is deduced in detail;Second, by analyzing the electromagnetic actuator and PID controller, the transfer function of the actuator and the controller is obtained, and the control system model of the active dynamic vibration absorber is established;Finally, the numerical simulation of the control system is carried out,the frequency response function curve of the displacement of the main system and the response curve of the displacement of the main system under different excitation are obtained.The analysis results show that compared with the passive dynamic vibration absorber, the active vibration absorber based on PID control algorithm has a better vibration absorption effect and wider vibration suppression bandwidth.
dynamic vibration absorber;active control;PID controller; frequency response
2016-11-07
贾富淳,男,18353367372@163.com;
孟宪皆,男,4900544005@qq.com
1672-6197(2018)01-0075-04
TB535
A
(编辑:刘宝江)
