基于制动距离表的高速铁路ATP常用制动曲线研究
2018-10-20柏卓彤李佳杰杜慎旭
柏卓彤,柏 赟*,李佳杰,杜慎旭
(1.北京交通大学交通运输学院,北京 100044;2.中铁第四勘察设计院集团有限公司线路站场设计研究处,武汉 430063)
列车自动防护系统(ATP)作为列车运行控制系统的核心子系统,是保证列车运行安全和提高运输效率的重要基础。其核心是车载ATP自动防护曲线计算模型,模型设计的优劣直接影响到列车运行安全和效率[1]。自动防护曲线[2]主要包括紧急制动曲线、紧急制动触发曲线、常用制动曲线、常用制动触发曲线和报警曲线。其中,常用制动曲线是ATP自动防护曲线的核心,其余曲线都可在其基础上简单推导得到[1]。因此,对于ATP常用制动曲线计算模型的研究至关重要。
国内外已有不少有关ATP制动曲线计算模型的研究成果[3-8]。文献[1]将ATP常用制动曲线计算方法归纳为两种:基于减速度和基于制动距离表的常用制动曲线计算方法。后者是指列车在运行过程中,车载设备根据实时接受到的信息,把数据归纳到预先储存在车载计算机里的制动距离表中进行查表递推计算的方法。文献[9]中将静态限速和临时限速考虑在内,并用递推方法生成制动曲线。文献[10]基于有色Prtri网建立城市轨道交通CBTC中的ATP模型,并通过模型仿真找出其在保证安全方面的缺陷。文献[11]通过对单限速以及多限速区段ATP制动曲线的建模仿真,研究因故障切除部分制动力对列车运行安全的影响。
上述既有研究大多仅为对ATP控制机理和逻辑的定性描述或基于理论条件下的运动学模型的定量研究。理论条件下,车载设备需根据列车的制动性能以及运行过程中速度、坡道等数据的变化,实时计算ATP常用制动曲线。然而,受限于车载计算机的计算能力,理论计算方法难以直接应用于实际情形。因此,须在兼顾安全和效率的条件下,对ATP常用制动曲线进行简化计算。
本文根据列控实际应用的自动防护曲线计算原理及既有理论研究,建立基于制动距离表的ATP常用制动曲线计算模型,并通过列控实际数据验证其有效性。同时,以郑州—武汉高铁线路许昌东站为例,对比基于制动距离表的计算模型与理论计算模型的计算效率、安全余量和通过能力,从而对基于制动距离表的计算方法进行分析与评估。
1 理论计算模型
ATP常用制动曲线理论计算模型是基于列车牵引计算原理,应用运动学公式建立的模型。理论计算模型的ATP防护距离包括空走距离、有效制动距离和安全距离[12]。由于根据列车速度以及《牵规》规定的空走时间,空走距离可以通过简单的计算得出,并且对于制动曲线仿真的精度没有影响,所以主要对从起模点到行车许可终点的制动曲线进行研究。有效制动距离是指列车从制动有效时刻始至达到目标速度止这段时间内走行的距离,须根据列车制动性能、线路参数等数据,应用力学原理计算得到。安全距离是考虑到车载设备计算、定位的误差而保留的裕量。
为简化计算,既有的理论计算多采用单质点模型[13-14],即将列车简化为一个无尺寸的质点。但实际上,动车组是一个非刚性连接的多质点振动系统,单质点模型由于忽略了列车在变坡点处所受多个坡道阻力的影响,导致计算精度的下降。基于此,本文建立多质点模型,即将每节列车看作单个质点、动车组视为多个质点构成的质点链,由链上各质点所受纵向力的合力决定列车的运行状态,从而更为精确描述列车制动过程。
1.1 列车受力
列车制动过程中受到的外力主要包括3部分:制动力、基本阻力和附加阻力。其中,制动力是由制动装置引起的阻碍列车运行的力;基本阻力是列车与车辆零部件、空气等之间由于摩擦和冲击而形成的,在运行过程中始终受到的力;附加阻力是由于线路、桥梁或隧道等原因产生的阻力[15]。
1.1.1 制动力
动车组列车运行时,在确定的手柄级位和速度下,制动减速度可以通过《列车运行监控装置(LKJ)控制模式设定规范》[16]提供的动车组速度-减速度函数确定。如图1为CRH380A型动车组列车第7级手柄位对应的速度-减速度曲线。
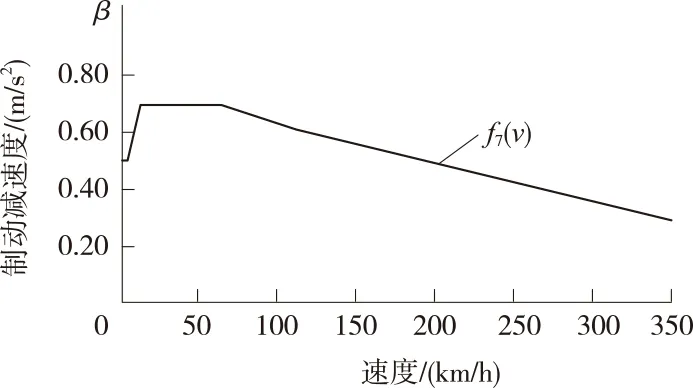
图1 CRH380A型动车组列车制动减速度
根据制动减速度与速度的对应关系,可以得到列车在对应速度下的减速度(公式(1))以及列车制动力(公式(2))。其中,M为列车质量,t。β为列车制动减速度,m/s2。B为列车制动力,kN。
β=f(v)
(1)
B=β·M
(2)
1.1.2 基本阻力
基本阻力是指列车在空旷的平直轨道上运行时,由于列车内部与外界接触相互摩擦和冲击而引起的阻力。单位基本阻力的经验性公式为
w0=a+b·v+c·v2
(3)
式中,w0为单位列车基本阻力,N/kN;v为列车速度,km/h;a,b,c为经验常数。
1.1.3 附加阻力
列车附加阻力由运输线路条件所决定,主要包括坡道附加阻力、曲线附加阻力和隧道附加阻力。
列车在坡道上运行时,重力沿轨道方向的分力被称为坡道附加阻力。当动车组在变坡段运行时,基于多质点模型的计算附加阻力的计算公式为[17]
(4)
式中,wi为单位坡道附加阻力,N/kN;L为列车长度,m;la为跨过变坡点列车长,m;ia,ib分别为变坡点前、后坡度,‰。
曲线附加阻力指当列车通过曲线时,由于离心力引起摩擦的增加,以及车轮在轨面上滚动时产生相对滑动等因素产生的附加阻力。其计算公式为
(5)
式中,wr为单位曲线附加阻力,N/kN;R为曲线半径,m;Sr为曲线长度,m,当列车长度小于曲线长度时,取列车长度L。
隧道附加阻力指列车在隧道内运行时,由于压力差和摩擦等因素产生的附加阻力,其计算公式为
ws=0.000 13LS
(6)
式中,ws为单位隧道附加阻力,N/kN;LS为列车在隧道中长度,m。
将以上3种单位附加阻力wi、wr、ws合并计算,即为单位加算附加阻力wj
wj=wi+wr+ws
(7)
1.2 制动曲线计算
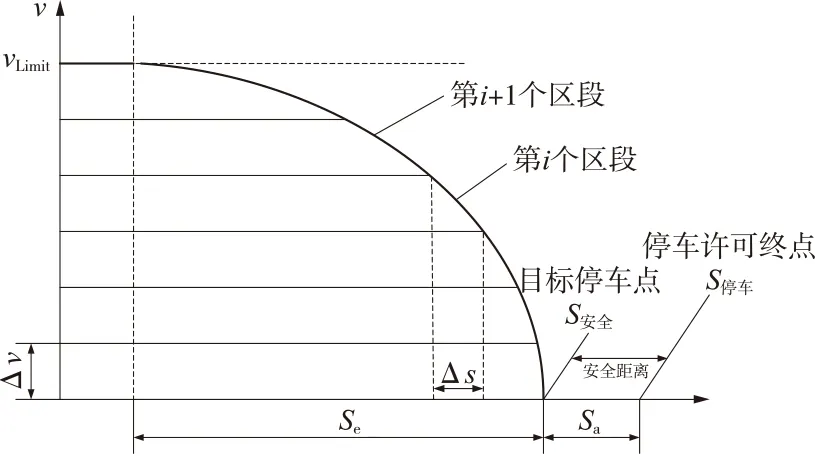
图2 曲线反推法计算原理
主要通过从目标停车点反推迭代的方法计算制动曲线,即从已知列车目标停车点及目标速度向列车最高限速进行反向计算(图2)。将制动过程的速度平均分成n个等长的小区段Δv,在列车制动过程中尽管减速度随速度连续变化,但在一个较小的速度间隔Δv内,可以将其简化为匀减速运动。以第i个区段的末速度作为i+1个区段的初速度,对每个步长内运行时间、距离进行迭代计算,直至推算到最高限速vLimit。
根据以上列车运行过程中动力学公式和列车制动距离计算方法,可得列车每一速度步长内的走行时间Δt和距离增量Δs
(8)

(9)
式中,γ为回转质量系数,通常取0.06;Δt为走行时间,s;Δs单位为m;v0,Δv单位为km/h。
由于列车制动模型参数以及速度、位置测量等存在误差,列车行车许可终点与目标停车点之间必须要加入一段安全距离,以确保列车不越过前方目标点,保证运行安全。中国铁路总公司规定,减速控制模式距离计算的安全距离S安全取60 m。
综上,基于理论计算模型的ATP常用制动防护距离S的计算公式为
(10)
2 基于制动距离表的ATP曲线计算模型
列车运行时减速度受到基本阻力和坡道等多种因素的影响而实时改变,但实时的仿真计算对计算机的计算速度和内存提出了更高的要求。受限于列车车载计算机的能力,理论计算模型难以适用,因此有必要对复杂的理论计算模型进行简化。在实际的应用中,通常采用基于制动距离表的计算方法。方法的计算过程分为地面计算和运行计算两部分。
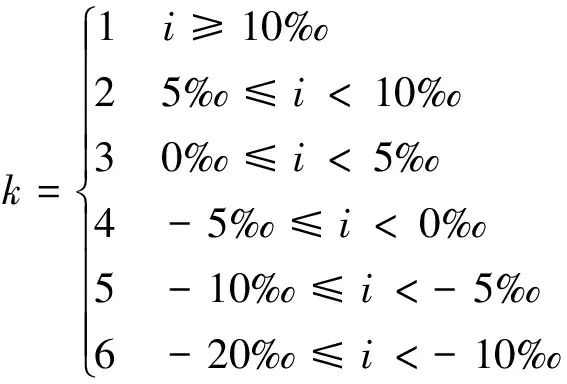
地面计算主要是指根据动车组特性建立列车在不同坡道、不同速度下的制动距离表。为了保证安全,地面计算只考虑坡道阻力,忽略其余阻力并将之作为裕量。将坡道划分为六档,坡度值取为10‰、5‰、0‰、-5‰、-10‰、-20‰,速度间隔取5 km/h,分别计算每一坡度条件下,不同速度对应的制动距离,得到制动距离表{T1,T2,T3,T4,T5,T6}。
运行计算指列车在运行过程中,基于植入车载计算机的制动距离表,根据设备实时接收的数据,从停车参考点S0的目标速度vtarg et开始进行查表计算,反推ATP常用制动曲线,车载计算机的计算流程如图3所示。
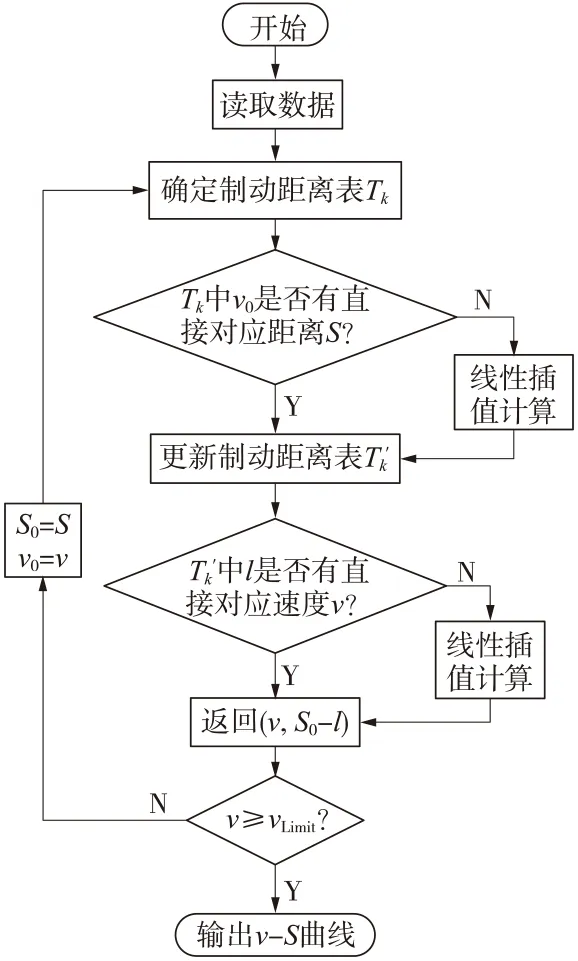
图3 基于制动距离表的运行计算流程
运行计算时,曲线计算的初始参数如公式(11)、公式(12)所示,其中,S安全为安全距离,m;S0为目标停车点里程,m;S停车为停车许可终点,m;v0为初速度,km/h。读取的数据包括线路数据(坡度、坡道长度等)以及速度数据(限速信息vLimit等)。
S0=S停车-S安全
(11)
v0=vtarg et
(12)
计算过程主要分为:确定初始参数、迭代计算以及结束判断3部分。
(1)设备接收实时数据,计算机根据由行车许可终点和安全距离计算得出的目标停车点里程和目标速度确定曲线反推起点,据此进行迭代。
(2)在每次迭代计算过程中,以当前位置为基准,以此时速度为初速度,查找下一段坡道坡度i对应的制动距离表Tk,并检索Tk中对应初速度v0的距离S。接着,以距离S更新制动距离表,得到本次迭代计算过程中使用的制动距离表Tk′。检索Tk′中对应此坡道长度l的速度v,得到曲线上一点(v,S0-l),完成本次迭代。
(3)每次迭代结束后判断是否达到限制速度vLimit,若未达到,则进行数据更新,执行下次迭代。
根据以上步骤,直至输出完整的v-S曲线。
迭代计算的整体步骤也可用公式(13)、公式(14)概括。每次迭代过程中,本区段内的末速度vi+1作为下一区段内的初速度vi,每步迭代分别计算得到曲线上点(vi+1,Si+1)直至限速vLimit。
(13)
Si+1=Si-li
(14)
式中,vi为第i区间的初速度,km/h;Si为第i区间起始位置里程,m;li为第i个区间的坡长,m。
(15)
(16)

(17)
3 实例分析
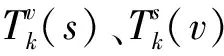
为了验证基于制动距离表的ATP常用制动曲线计算模型的效果,在Matlab仿真平台上,以郑州—武汉高速铁路线上许昌东站为例,推算列车常用制动曲线,与实际列控数据以及理论计算数据进行对比,结果如图4所示。可以看出,理论计算条件的制动减速度最大,基于制动距离表方法和列控实际情况在考虑到实际因素后,均降低了制动减速度,增加了常用制动距离,保证列车即使在最不利条件下也能够在行车许可终点前制动停车。
图4 许昌东站常用制动曲线
应用公式(18)对基于制动距离表计算方法和列控实际数据的拟合情况进行分析,式中,v代表列控实际速度,v*代表制动距离表方法的计算速度。二者的拟合系数达到96.06%,可以看出,基于制动距离表的计算方法与列控的实际数据有较好的拟合度,说明基于制动距离表的计算方法与列控实际计算方法基本一致。
(18)
以下将分别从运行效率、安全余量以及通过能力的角度,对基于制动距离表的计算方法进行分析。
3.1 计算效率
为验证基于制动距离表方法的计算效率,在Matlab仿真程序中,以许昌东站为例,分别统计本文方法和理论计算方法推算ATP常用制动曲线所用的计算时分,结果如表1所示。

表1 两种方法计算时分对比
由表1可知,基于制动距离表的计算时分仅为理论计算方法的22.02%,单位时间内的运行效率提高了354.1%。因此,基于制动距离表的计算方法,有效提高了ATP超速防护曲线的计算效率,能更好地适应车载计算机容量和速度的限制。
3.2 安全余量
理论计算方法是基于力学分析并进行简化,建立的理想制动过程的数学模型。尽管理论计算方法已经保留了安全距离,但考虑到计算过程的化简、设备的精度以及实际应用的各种突发状况和不利因素,为了确保列车运行安全,实际往往会在理论计算模型的基础上进一步保留一部分速度裕量。这部分速度裕量的主要来源是:计算制动距离表过程中保存的裕量以及查表计算过程遵循的“向下取值”的原则。这部分预留的速度与理论计算速度的比值称为安全余量
(19)
式中,R为安全余量;v理论为理论计算速度,km/h;vi为制动距离表方法的计算速度,km/h。
安全余量是平衡列车运行效率与行车安全的关键。当整体预留安全余量过大时,列车运行速度低,追踪时间长,通过能力低。反之,安全余量过小,高速铁路行车安全就会存在潜在隐患。特别的,当安全余量为零甚至为负数,即计算速度大于理论计算速度时,在选定手柄级位下极有可能出现无法在行车许可终点停车情况,轻则触发紧急制动影响运行平稳,重则造成列车相撞甚至颠覆。根据上述计算公式,可得出基于减速度制动计算方法的安全余量波动曲线(图5)。
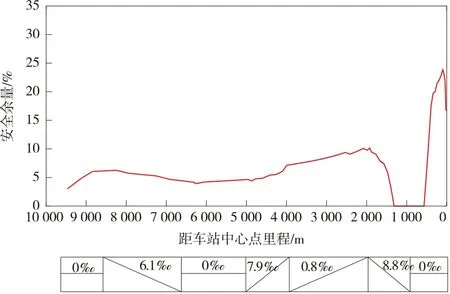
图5 许昌东站安全余量曲线
可以看出,基于制动距离表的计算方法的安全余量波动以静态限速区段为间隔分为3部分,在整体上安全余量波动较为均匀。起模点至静态限速区段作为整个制动过程的主体部分,安全余量稳定在6%左右。曲线安全余量为0的曲线对应静态限速区段部分,该部分由于列车运行限度已经确定,无需保留安全余量。在进站停车的最终时段,为了保证列车停车有较好的舒适度和平稳度,保留了较大的安全余量。整体的安全余量在8%左右,可以说明,基于制动距离表的计算方法在运行效率和行车安全之间保持较好的平衡。
3.3 通过能力
通过优化高速铁路ATP防护曲线,从而挖掘繁忙干线上运输潜力、提高通过能力是我国高速铁路的重要课题。缩小列车追踪间隔,从而增加单位时间内的发车数量是提高线路通过能力的有效途径。追踪间隔是自动闭塞区段同一方向追踪运行的两列车的最小时间,由区间追踪间隔时间、出发追踪间隔时间、进站到达追踪间隔时间和通过追踪间隔时间中的最大值决定。研究表明,进站到达追踪间隔时间是追踪间隔时间的最大限制,直接影响到线路的通过能力[18]。以下对基于制动距离表计算方法的进站到达追踪时间进行分析。
进站到达追踪间隔时间I到指自前行列车到达车站时起,至同方向后行列车到达该站时止的最小时间,其计算原理如图6所示。

图6 进站到达追踪间隔时间计算原理示意
进站到达最小间隔时间的计算公式如下

(20)
(21)
式中,S咽喉为咽喉区长度,为出站信号机至反向进站信号机间的距离,本文根据实际均值取600 m;S列车
为列车长度,根据实际CRH380A型动车组,取为203 m;t作业为列车到达作业时分,一般取36 s;t制动为列车制动过程时间,s。
基于以上算法,得到许昌东站理论计算方法下的列车到达追踪间隔时间为243 s,基于制动距离表方法的列车到达追踪间隔时间为267 s。二者都小于现阶段高速铁路常用的5 min追踪间隔时间,为确保列车运行作业的安全和准确保留了一定时分。尽管基于制动距离表的ATP曲线计算方法为了在简化计算的同时保证安全,较理论计算损失了9.88%的列车追踪间隔时间,但仍然满足5 min的追踪间隔要求,说明方法具有较强的实用性。
4 结语
本文通过对ATP常用制动曲线的理论计算方法和基于制动距离表的计算方法进行深入研究,建立了两种计算方法的模型。许昌东站的实例验证中,基于制动距离表模型的计算曲线与列控实际曲线的拟合优度达到96.06%,验证了本文模型的有效性。在计算效率方面,基于制动距离表的计算方法显著高于理论计算方法,计算时分减少了77.98%。并且,本文方法与理论计算方法间的安全余量较为均匀,整体约为8%。最后,由于基于制动距离表计算方法简化了理论计算模型,导致列车追踪间隔时间的一定损失(9.88%),但总体令人满意,有较好的实用性。