转子单平面自适应平衡控制仿真及电主轴平衡试验
2018-10-18樊红卫景敏卿马宏伟
樊红卫,景敏卿,刘 恒,4,马宏伟
(1.西安科技大学 机械工程学院,陕西 西安710054;2.西安交通大学 机械工程学院,陕西 西安710049;3.西安交通大学 机械结构强度与振动国家重点实验室,陕西 西安 710049;4.西安交通大学 现代设计及转子轴承系统教育部重点实验室,陕西 西安710049)
0 引 言
转子动平衡技术一直伴随旋转机械的发展而发展,是其振动控制的主要手段之一。目前,旋转机械正向高效率、高精度和智能化方向发展,其动平衡方式也随之从传统的离线平衡向在线平衡过渡。在线平衡包括被动平衡和主动平衡2种方式,被动平衡[1-3]属于无源平衡,依靠平衡机构与被平衡对象动力学特性之间的匹配实现平衡校正;主动平衡属于有源平衡,依靠一套由传感器、控制器和平衡机构构成的系统实现反馈控制。在主动控制策略中,基于影响系数的平衡策略不需要对转子系统进行精确建模和求解,易通过计算机实现在线实时控制,因此基于影响系数的各种在线主动平衡方法已经成为转子动平衡领域的当前研究热点。
1978年,Vegte等提出了梯度寻优法[4],较早开启了基于机械式主动平衡装置的控制算法研究。直到2000年左右,Dyer等发明了自适应影响系数法[5],Shi对Jeffcott转子自适应平衡方法进行了深入研究[6-7]。随后,Zhou等研究了变速自适应控制模型[8-10],Dyer等对变速转子多平面主动平衡控制方法进行了研究,Shin提出了鲁棒最优影响系数控制[11]。2004年,Zhou对加速过程刚性转子单平面主动平衡最优控制进行了研究,提出了影响系数表法[12]。Kim等对影响系数增益调度控制进行了研究,通过试验验证了其稳定性[13]。2012年,DeSmidt研究了转子双平面自动平衡控制策略,对控制稳定性进行了分析[14]。国内,1998年,欧阳红兵提出了转子动平衡快速随机寻优控制策略[15]。之后,沈伟对自适应影响系数法进行了探索,在化工机械上进行了试验验证[16-20]。结合以上研究可知,固定参数自适应平衡控制方法易于实现,但其控制因子取值对控制算法收敛性、稳定性和应用效果具有较大影响。
为了将自适应平衡方法引入机床高速主轴的智能平衡[21-24],文中探讨适合刀具-主轴系统单平面在线主动平衡策略,主要研究转子自适应平衡控制模型、控制因子对平衡过程的影响以及电主轴单平面自适应平衡试验,为转子单平面自适应平衡控制系统开发和机床工业应用奠定基础。
1 转子单平面自适应平衡控制模型
经典的转子动平衡影响系数法是利用不平衡矢量与转子系统振动响应之间的线性关系使其达到平衡状态的,其中,影响系数是指单位不平衡矢量所产生的振动。对于转子在线平衡而言,影响系数只能通过不停机在线试重方式获得。
根据影响系数法原理,转子在线平衡的校正量由下式计算得到
(1)
式中uk+1,uk为第k+1,第k次迭代时的平衡校正量,g·cm;vk为第k次迭代时转子系统的振动响应;c为系统的影响系数,均由试验测试得到。转子系统单平面主动平衡的目标就是求取合适的uk+1使第k+1次迭代的振动输出趋近于零。
引入自适应控制的思想,对转子动平衡影响系数法进行改造。针对式(1),增加增益因子α,则有
(2)
经过推导,可得如下振动历程关系式
(3)
当且仅当满足下式(4)时,针对固定的影响系数c,单平面主动平衡的控制律式(3)才是稳定的
(4)
假设将第k-1次平衡迭代的结果作为第k次平衡补偿的初始状态vk-1,通过主动平衡装置的动作,转子系统的振动将更新为vk,则新的影响系数由下式计算得到
(5)
进一步,为了减小当次测量噪声对影响系数在线估计结果的影响,需要在影响系数的在线估计方案中考虑先前结果,采用“加权法”来更新影响系数,方案如下
(6)

设转子系统实际影响系数为0.4+0.3i,初始影响系数为0.2+0.3i,取遗忘因子β=0.1,0.3,0.5,0.7,0.9,则影响系数幅值与相位的收敛过程如图1所示,由图可知在不同的遗忘因子作用下影响系数的幅值和相位均能够顺利收敛即趋于某一确定值。
在以上引入增益因子和遗忘因子的基础上,转子系统单平面自适应平衡控制律可由下式(7)表示
(7)
2 控制因子对平衡算法的影响仿真
以下通过数值仿真来研究增益因子和遗忘因子单独作用及共同作用时对自适应平衡控制过程的影响规律,在仿真中假设转子系统的真实影响系数为0.4+0.3i.
2.1 增益因子影响仿真
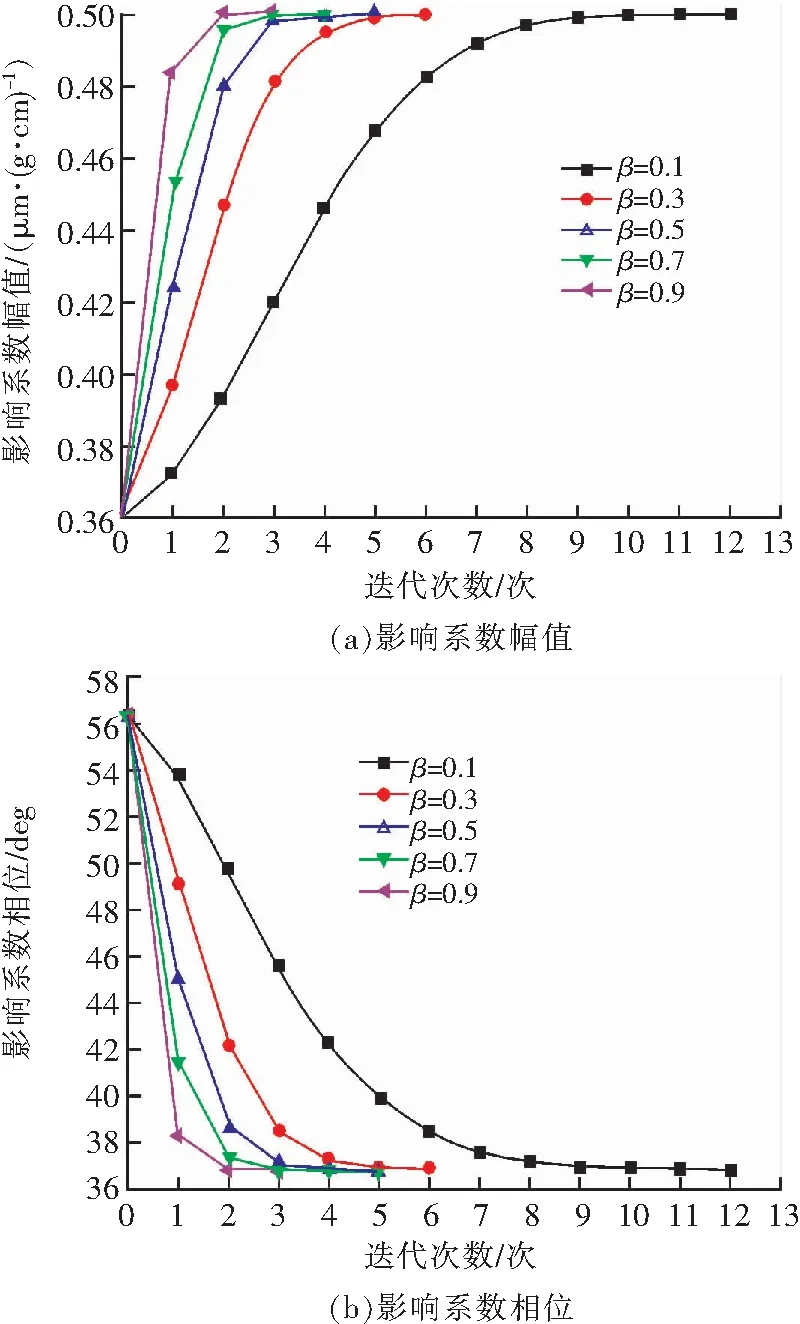
图1 遗忘因子对影响系数估计收敛速度的影响Fig.1 Influence of forgetting factor on convergence rate of influential coefficient estimation
设初始振动幅值为30 μm,相位为45°,初始影响系数为0.8+0.6i,遗忘因子β=1,考察不同增益因子下不同影响系数估测值所引起的系统振动幅值的变化。仿真结果见表1,给出了试重一次即迭代一次后的振动数据。其中,α=1的情况即为普通影响系数法,其余情况为自适应影响系数法。

表1 不同增益因子下不同影响系数估测值引起的系统振动幅值仿真结果
针对表1数据分析如下
1)当估测影响系数为0.8+0.6i时,与真实影响系数同相位,此时对于不同增益因子,经一次迭代后振动幅值均减小,不会出现减小又增大的不稳定现象;增益因子越小,幅值降低程度越小、收敛速度越慢;
2)当估测影响系数与真实影响系数的相位之差小于90°时(如估测影响系数为0.8-0.6i),经一次迭代后振动幅值均减小;
3)当相位差大于90°时(如估测影响系数为-0.8+0.6i,-0.8-0.6i),经一次迭代后振动幅值会出现减小又增大的不稳定现象,但是随着增益因子的减小,幅值增大的趋势总体下降,表明小的增益因子可以增强平衡过程的稳定性;
4)当估测影响系数为-0.8+0.6i时,与真实影响系数相位之差为106°,增益因子α=1时,振动幅值比初始振动减小,是因为选择大的增益因子会使计算所得到的平衡补偿量大于系统自身的平衡补偿量而使系统以最大平衡补偿量处理,冲过了使振动增大的状态,振动减小;
5)在表1中,估测影响系数幅值均为真实影响系数幅值的2倍,属错误的影响系数估计,但结果表明只要相位误差在90°以内依然能够得到使振动减小的理想趋势。
2.2 遗忘因子影响仿真
设初始振动幅值为40 μm,相位为45°,增益因子为α=1,初始影响系数分别为0.8+0.6i和0.8-0.6i,在外界无干扰和有干扰(有干扰时anew=-0.8+0.6i)2种情况下,针对不同的遗忘因子,仿真得到了平衡控制过程,如图2所示。

图2 遗忘因子对平衡迭代过程的影响Fig.2 Effects of forgetting factors on balancing iteration process
针对图2分析如下
1)由图2(a)知,当初始影响系数与真实影响系数同相位时,平衡迭代结果不随遗忘因子增大而改变,因此可选择较小的遗忘因子;
2)由图2(c)知,当初始影响系数与真实影响系数相位相差较大时,遗忘因子越大,系统的迭代收敛速度越快;
3)对比图2(a)、(b)及(c)、(d)可知,在错误的初始影响系数下,受外界干扰的影响,平衡过程可能会出现振动增大的情况,此时应选取较小的遗忘因子抑制这种不稳定现象的发生。
2.3 增益因子和遗忘因子共同作用仿真
设初始振动幅值为30 μm,相位为45°,初始影响系数分别为0.8+0.6i,0.8-0.6i,-0.8+0.6i和-0.8-0.6i,遗忘因子β=0.8,在不同增益因子下,平衡迭代过程如图3所示。
针对图3分析如下
1)由图3(a)、(b)、(c)、(d)知,在一定范围内,增大增益因子可显著提高迭代收敛速度;
2)由图3(d)知,当初始影响系数与真实影响系数相位相差较大(超过90°)时,系统也能够收敛,说明了选择合适的增益因子与遗忘因子的组合可以降低对初始影响系数选择准确性的苛刻要求;
3)由图3(c)知,当增益因子选取不恰当时,系统可能会提前退出迭代,达不到预期的平衡效果,故须合理选取增益因子。
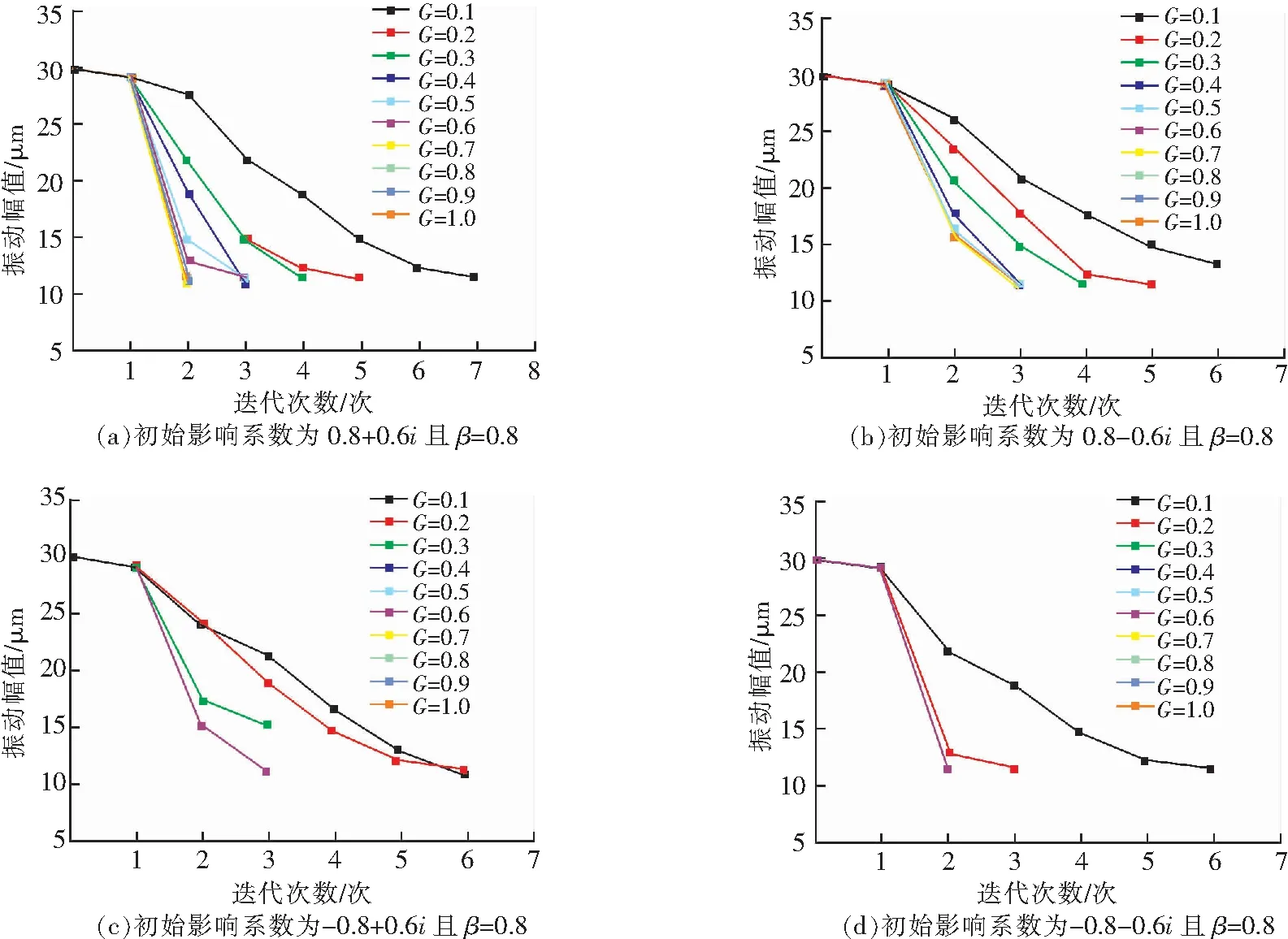
图3 增益因子对平衡迭代过程的影响(遗忘因子不等于1.0的情况)Fig.3 Effects of gain factors on balancing iteration process(forgetting factor is not equal to 1.0)
3 高速电主轴自适应平衡控制试验
3.1 高速电主轴自适应平衡试验台
为了检验上述转子自适应平衡算法的收敛性和稳定性规律在实际转子单平面主动平衡过程中是正确的,在实验室建立了高速电主轴自适应平衡试验平台,如图4所示。

图4 高速电主轴自适应平衡试验平台Fig.4 High-speed motorized spindle adaptive balancing test bed
在图4中,电主轴采用洛阳轴研科技股份有限公司170MD12Y16型磨削电主轴(三相异步电机、滚动轴承支撑、油雾润滑、循环水冷却),主动平衡装置采用课题组自主设计开发的电磁圆环形平衡头[25-31],安装于主轴前端靠近模拟砂轮盘的位置,模拟砂轮盘用于产生一个初始的外加不平衡量。所用的传感器包括压电加速度、电涡流位移测振传感器和光电转速计。整个试验台的设计工作转速范围为100~12 000 r·min-1,电磁平衡头的最大平衡能力设计为38.55 g·cm.
在实验室进行了600~6 000 r·min-1转速范围内不同参数设置下的多次平衡控制试验,并经过大量数据分析选取了其中误差较小且定性规律表现良好的代表性数据以作为与理论仿真定性规律的对比验证,如下文。
3.2 增益因子对实际平衡过程影响试验
设电主轴以3 300 r·min-1正转,外加不平衡为24.59 g·cm∠300°,初始影响系数为-0.3-0.1i,遗忘因子β=0.8,增益因子选择α=0.2,0.8,则实际平衡控制过程如图5所示,振动信号时域波形如图6所示。根据图5可知,当α=0.2时经过7次迭代振动幅值由16.48 μm降至2.76 μm,降低率为83%;而α=0.8时经过5次迭代振动幅值由18.36 μm降至3.07 μm,降低率亦为83%.根据图6可知,当增益因子选择较小的0.2时,虽然迭代次数多了2次但平衡过程更加平稳;当增益因子选择较大的0.8时,虽然迭代次数少了2次但会出现振动增大的情况,即控制稳定性较差。这一实验规律与前述的理论仿真结果是一致的,即增益因子较小时,迭代过程变慢、稳定性提高,而较大时,迭代过程加快、稳定性变差。

图5 遗忘因子固定、增益因子为0.2和0.8时平衡控制迭代过程Fig.5 Balancing control iterative process with fixed forgetting factor and gain factor of 0.2 and 0.8
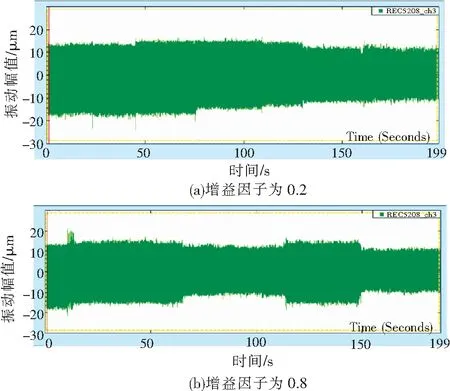
图6 不同增益因子的平衡过程时域波形Fig.6 Balancing process waveform under different gain factors
3.3 遗忘因子对实际平衡过程影响试验
设电主轴以3 300 r·min-1正转,外加不平衡为24.59 g·cm∠300°,初始影响系数为-0.3-0.1i,增益因子α=0.8,遗忘因子选择β=0.3,0.8,平衡过程中无明显外界干扰(空压机不开启)时,平衡控制过程如图7所示。当β=0.3时,振动幅值由16.66 μm降至3.89 μm,降低率为77%;β=0.8时,振动幅值由18.36 μm降至3.07 μm,降低率提高为83%;二者的残余振动(3.89,3.07)和振动降幅(77%,83%)相近,迭代次数相同(均为5次),出现这一结果是因为所选取的初始影响系数接近于真实影响系数,这说明了在外界无干扰且影响系数初始值接近于真实值时,遗忘因子取不同值对收敛速度影响不大,因此,准确的影响系数在线估计可以放宽对遗忘因子取值的苛刻要求,这一结论与之前的理论仿真结果也是一致的。
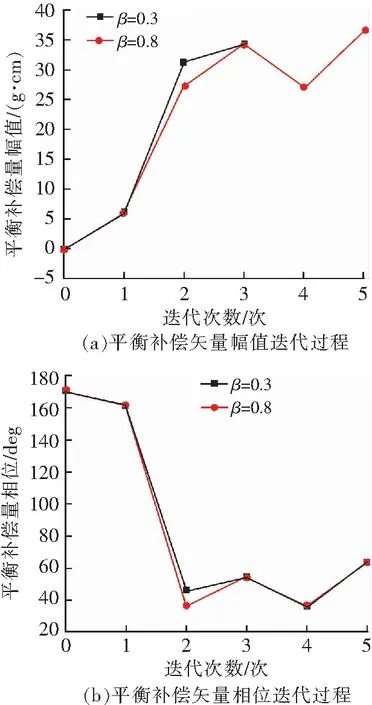
图7 增益因子固定、遗忘因子分别为0.3和0.8时平衡控制迭代过程Fig.7 Balancing control iterative process with fixed gain factor and forgetting factor of 0.3 and 0.8
4 结 论
1)建立了转子单平面自适应平衡控制数学模型,通过数值仿真证明了不同遗忘因子下影响系数均可收敛;
2)获得了增益因子和遗忘因子对单平面自适应平衡控制过程收敛性、稳定性及收敛速度(迭代次数)影响规律,明确了增益因子和遗忘因子取值原则;
3)建立了电主轴单平面自适应平衡试验台,完成了3 300 r·min-1下主动平衡试验,从迭代次数、平衡过程稳定性和振幅下降率来看,单平面自适应平衡控制方案是正确且有效的,试验与仿真规律总体是吻合的。
