带自锁机构的垂索回收无人机翼尖拦阻钩设计
2018-10-18唐春
唐 春
(江苏自动化研究所,江苏 连云港 222061)
当前舰载固定翼无人机的回收方式主要包括:滑降、撞网、打捞和空中垂索回收等[1],要求舰上配备安全着舰系统,如X-47B无人机采用滑降辅以航母拦阻索[2],“先锋”无人机采用撞网回收[3]等。回收技术已成为影响舰载无人机技术发展的难题之一,能否安全自动便捷地回收舰载无人机是评价舰载无人机性能的重要指标。相对于滑降、撞网或打捞回收方式,空中垂索回收方式可将安全着舰系统悬于舰外,减少甲板空间,减少对舰上设备的损坏,并可根据回收路线多自由度调整回收位置,难度低,对气象要求低[4]。目前,垂索回收已在美国“扫描鹰”无人机上成功应用[5]。
机载拦阻钩作为垂索回收的必备装置,必须具备四个特点:1)拦阻钩外形设计成便于拦阻索滑入拦阻钩滑槽内;2)拦阻钩的锁紧机构必须能够卡死拦阻索,禁止无人机在绳索上下滑;3)拦阻钩的结构强度必须能够承受无人机和拦阻索之间的相互作用力;4)拦阻钩尽量选用轻质材料,减少无人机的总重。
现有的国内外固定翼无人机配装的拦阻钩都未设计有自锁机构,无人机撞绳后,都是依靠拦阻钩与绳索之间的摩擦力阻止飞机滑落。该方式存在飞机滑落的风险,在国内的回收试验中已经发生多次。为了提高回收成功率,技术人员进行了带有自锁功能的拦阻钩设计,并利用了CATIA(Computer Aided Three-dimensional Interactive Application)的多模块联动设计,提高了设计的成功率并缩短了设计本身的周期。
1 舰载无人机空中垂索回收过程
舰载固定翼无人机垂索回收装置主要由拖车、可旋转底座、液压支撑杆、机械臂、悬臂梁、弹簧组、拦阻索等组成。无人机的机翼翼尖安装有拦阻钩,当无人机在回收引导系统的控制下准确飞向回收点后,带有后掠角的左/右翼与拦阻索接触,绳索在无人机前进的同时向翼尖滑动,经拦阻钩的开口槽与拦阻钩通过锁紧装置连接[6]。无人机速度降为0 m/s时,无人机在拦阻索和水平梁弹簧组的作用下左右摆动直至停止。旋转底座将无人机移动到甲板上方,通过液压支撑装置回收,过程如图1所示。
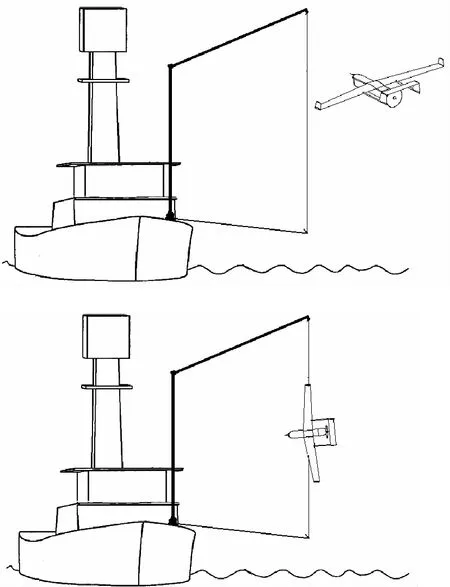
图1 舰载固定翼无人机垂索回收过程
在回收过程中,拦阻钩主要受力情况如下:
1)当飞机带动拦阻索向前运动时,拦阻钩壳体受到拦阻索逆航向的挤压力F1;
2)当飞机由于受到绳索拉力回摆时,拦阻钩锁紧装置受到拦阻索顺航行的挤压力F2。
通过分析发现,由于拦阻索与弹簧组回弹的弹性势能是由无人机的动能产生,因此F1>F2,本文分析挤压力F1。
本文以实际某型舰载无人机设计参数为例:该无人机质量m=15 kg、回收速度v=25 m/s、飞行高度方向控制误差ce=±1.74 m、垂索两段总安全余量长度bar=2 m。假设垂索长度为L(6 m~10 m)、拦阻索弹性系统为k、垂索水平方向最大形变量为Δx,为了使最大瞬时过载a最小化,求解如下方程:
最大瞬时过载时的受力方程[7]:
(1)
能量方程:
(2)
对计算结果进行分析,拟合出柔性拦阻索分析结果,并确定最终采用的柔性拦阻索参数为:垂索长L=10 m,弹性模量k=99 N/m,水平方向最大形变量Δx=8.5 m,最大瞬时过载a=5.7 g,垂索上产生的最大拉力F=481.3 N,两段垂索作用于拦阻钩的水平分力合力为Fx=833.6 N。
2 拦阻钩设计
拦阻钩主要由外部壳体和自锁机构组成,自锁机构是拦阻钩的核心部件,由多套弹簧机构和连杆机构组成的混合机构。机构各弹簧的弹性系数以及连杆的转动角度计算误差会影响机构的精度以及回收可靠性。本文采用CATIA的多个模块进行拦阻钩自锁机构设计和关键承力零件(外部壳体)的有限元分析,验证设计的科学性与正确性,确保设计成功,其设计流程如图2所示。
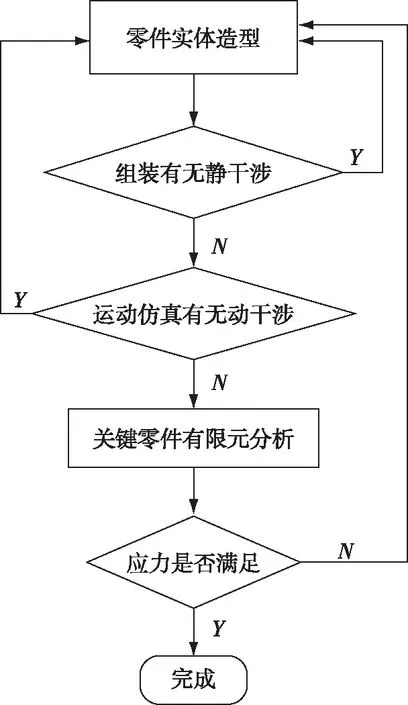
图2 设计流程图
2.1 三维实体建模与运动模拟
依据无人机垂索回收原理,利用CATIA的零件设计与装配设计模块进行如图3所示的拦阻钩三维实体模型设计,其中自锁机构主要由4组弹簧、2组连杆、制动块、制动销等组成。
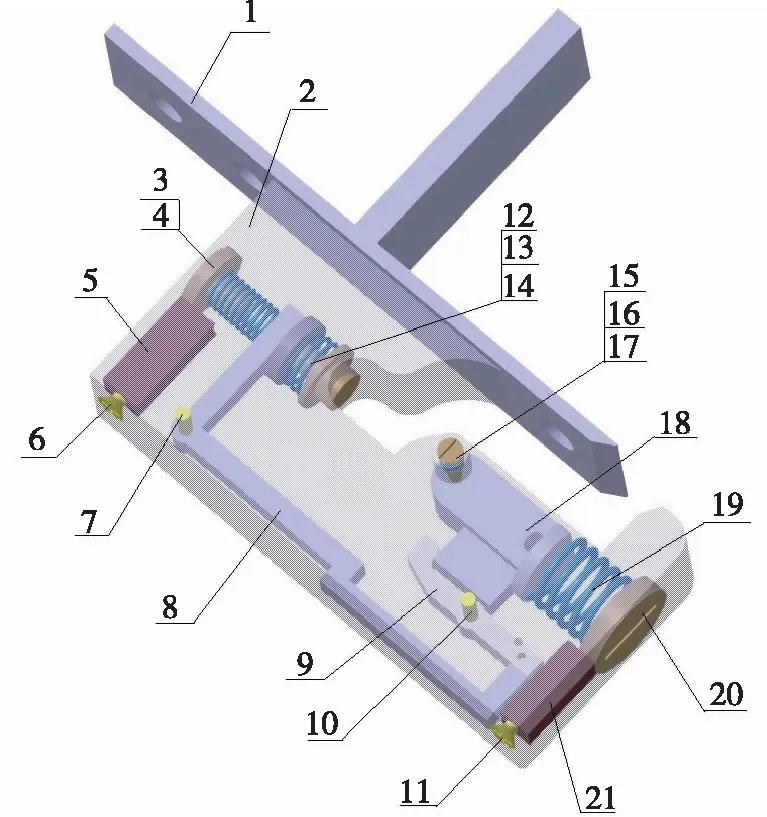
1. 机翼连接体; 2. 拦阻钩壳体; 3. M12法兰堵头; 4. φ5弹簧; 5,21. 后、前挡块; 6,11. M2×6沉头螺钉; 7,10. 销轴; 8. 长连杆; 9. 钩连杆; 12. φ8弹簧; 13. M12圆柱堵头; 14. 法兰轴; 15. 卡销; 16. M3圆柱堵头; 17. φ3弹簧; 18. 滑块; 19. φ10弹簧; 20. M12圆柱堵头图3 拦阻钩三维模型
图3中,设计原理是:法兰轴(14)一端处于滑槽外,另一端接触长连杆(8),连杆另一端与钩连杆(9)连接,钩连杆另一端挡住滑块(18)。当拦阻索滑入拦阻钩的滑槽内,利用两者之间的作用力推动法兰轴向后运动,带动长连杆、钩连杆转动,钩栏杆释放滑块,在弹簧(19)的作用下,滑块急速向前滑动,直至锁紧拦阻索并由卡销锁紧滑块。
结构数据初步建立后,为了保证所有零件之间无干涉和验证运动的可行性,需要对拦阻钩进行运动机构的校核,本文在DMU Kinematics环境下动态模拟机构的运动过程。首先对拦阻钩壳体施加固定约束,对法兰轴添加位移驱动,确定拦阻钩机构运动副(见表1)。根据运动分析结果,优化法兰轴和拦阻钩壳体内滑槽间的最大位移值,选择最合适的参数,然后开始录制运动过程。反复录制查看效果,并进一步修改零件,直至运动效果达到设计要求。图4所示为拦阻钩自锁机构在两种运动位置(分别为初始状态和锁紧状态)的结构样式。

表1 拦阻钩机构运动副
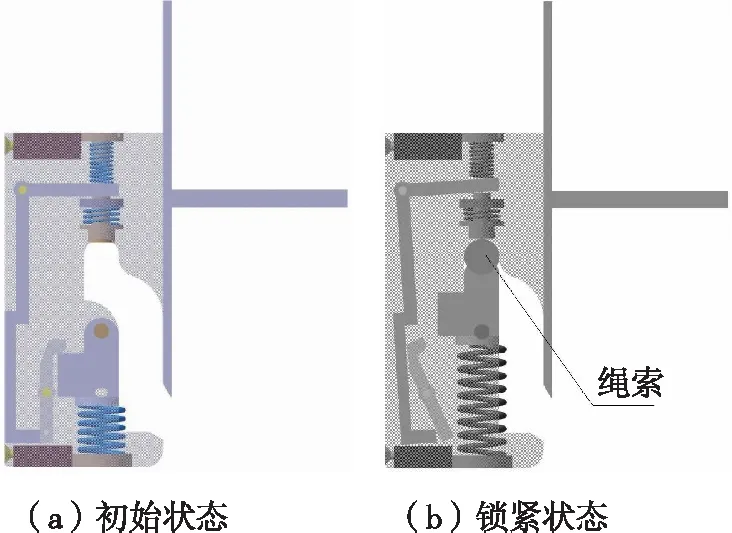
图4 拦阻钩自锁机构不同运动位置的结构样式
2.2 绳索与拦阻钩间摩擦系数校核
拦阻钩设计的最终目的是锁死拦阻索,防止无人机下滑,因此,必须校核拦阻索与滑块间的摩擦系数,Φ10弹簧(图5)设计参数见表2。
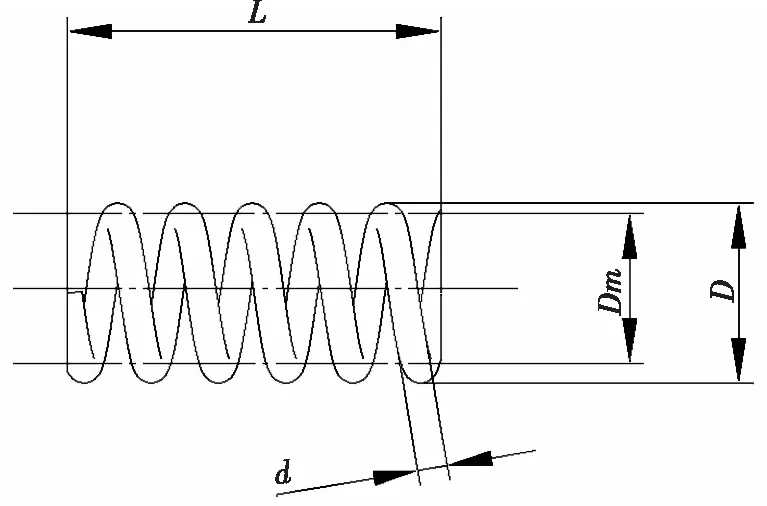
图5 弹簧示意图
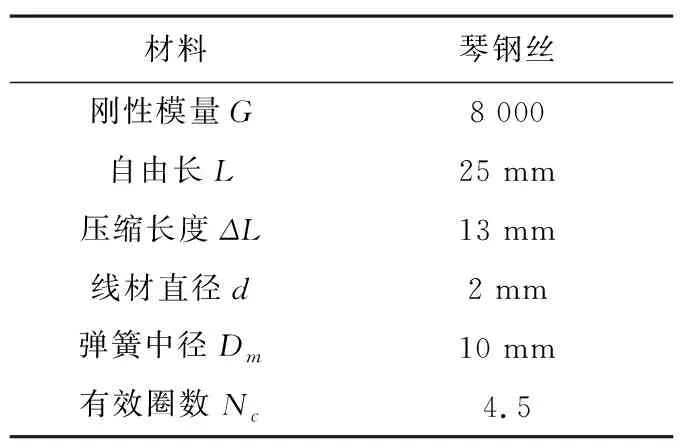
材料琴钢丝刚性模量G8 000自由长L25 mm压缩长度ΔL13 mm线材直径d2 mm弹簧中径Dm10 mm有效圈数Nc4.5
弹簧常数k:
(3)
弹簧压力F:
F=k·ΔL=46.28 kgf=453.5 N
(4)
由文献知,绳与铝材间的动摩擦系数约为0.45,为增大摩擦力,将与绳索接触的滑块与法兰盘表面进行表面处理,增加表面粗糙度,实验得出此时摩擦系数达0.62,即摩擦力Fμ=453.5×0.62=281.2 N,大于无人机自身重力147 N,满足设计要求。
3 拦阻钩壳体有限元分析
由力学分析知,拦阻钩壳体几乎承受所有拦阻索作用力,为关键承力零件,因此本文针对拦阻钩壳体进行有限元分析。利用网格划分工具,对网格规格进行设置,包括元素类型、网格尺寸、网格形状和网格凹陷等。由于拦阻索与壳体接触位置变形量最大,为主受力部位,网格划分时,该位置需对网格尺寸和垂度进一步细化[8]。图6为网格优化处理的结果,单元节点间的应力差小于单元最大应力的10%。

图6 网格优化处理的结果
表3为拦阻钩壳体的材料特性[9],表4为网格划分及壳体挤压应力加载的具体参数。由图7拦阻钩壳体挤压应力等值分布图知,拦阻钩壳体在受拦阻索水平分力合力833.6 N的挤压下的应力最大值为1e+007 N/m2,远远小于7075铝合金材质的屈服强度,拦阻钩不会产生疲劳、裂纹或断裂危险。
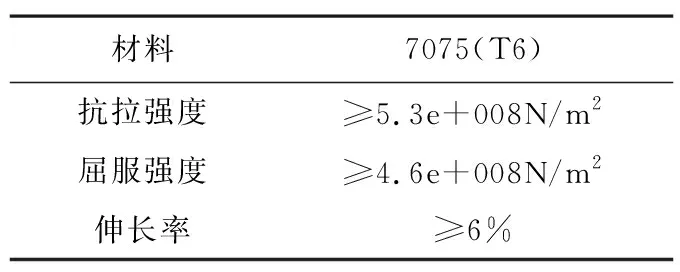
表3 拦阻钩壳体材料特性

表4 有限元分析具体参数
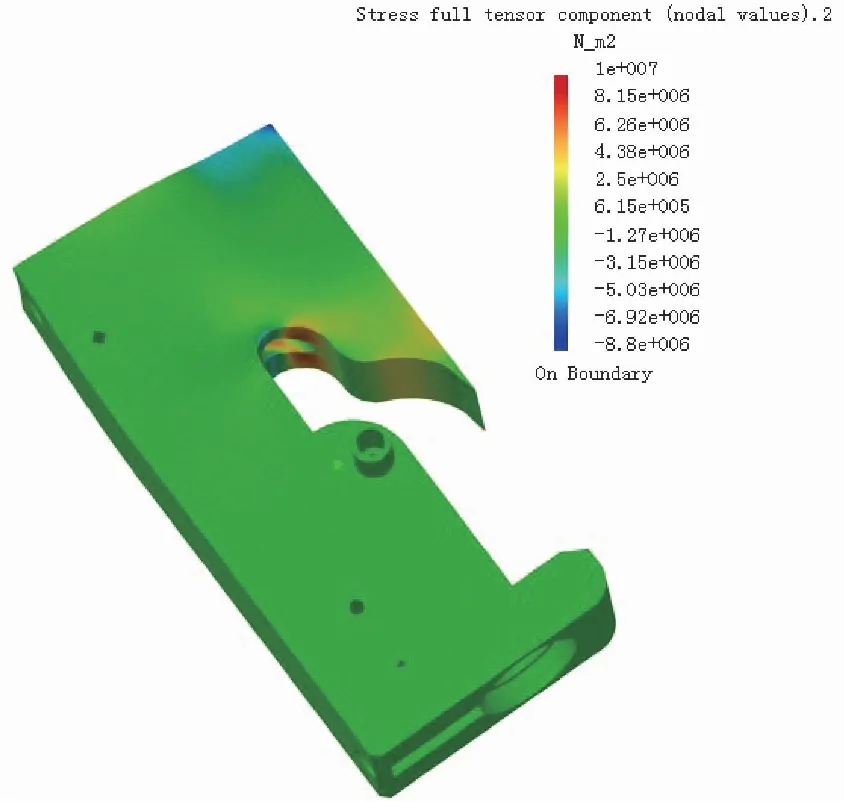
图7 拦阻钩壳体挤压应力等值分布图
4 结束语
本文针对垂索回收固定翼无人机的回收特点设计了一型具有自锁功能的翼尖拦阻钩,处于回收航路的无人机与拦阻索接触时,自锁机构在两者相互作用下快速勾住并锁紧拦阻索。利用CATIA软件进行拦阻钩模型的运动仿真和关键承力零件过载情况的有限元分析,得出应力等值分布图,确保设计可靠。
该型拦阻钩设计原理科学可行,通过弹簧及连杆实现自主回收,并解决了现有固定翼无人机回收时的自动下滑问题。通过简单的结构适配设计即可应用于多型舰载小型固定翼无人机(≤60 kg)的回收,有较好的推广价值和应用前景。拦阻钩现已在国内某型无人机(30 kg级)上实际应用,实际承受过载10g,回收速度28 m/s。
