基于一维云模型的四旋翼无人机智能控制技术
2018-10-18龚至诚
龚至诚,李 众
(江苏科技大学电子信息学院,江苏 镇江 212003)
随着AI技术飞速发展,智能控制技术在无人汽车、无人飞机、无人艇等无人系统控制领域广泛应用。四旋翼无人机是一种具有四个输入和六个自由度的欠驱动飞行器。与经典构型飞行器相比,四旋翼飞行器通过四只旋翼相互抵消反扭力矩,具有更简单的控制方式,只需改变四只旋翼的转速即可实现姿态的控制[1]。
四旋翼无人机具有与经典构型飞行器相似的控制特点,系统不稳定,并且具有非线性、欠驱动、强耦合等特点,飞行控制器的设计追求高品质的控制效果,想要实现精确、稳定的飞行控制,是四旋翼控制领域研究中最复杂的问题之一。四旋翼无人机的概念提出后,国内外众多学者尝试将各种控制算法和技术应用到四旋翼无人机的飞行控制与设计中,主要的控制算法有:经典PID控制[2-3]、模糊控制[4-6]、LQR控制[7-8]、滑膜控制[9]等,这些控制算法可以有效地提高四旋翼无人机飞行过程中的稳定性,控制系统对于控制信号的响应时间也得到优化。但是将控制算法应用于实际四旋翼无人机产品中时,串级PID控制算法仍然是使用最广泛的控制技术。在实际应用中,串级PID控制器被使用的频率很高,但由于它的设计理念是基于悬停平衡点出发的单输入单输出控制,虽然可以完成静止状态下要求不高的飞行任务,但在大姿态、高角速率等快速跟踪模态中,由于被控对象的非线性特征对控制系统的影响,无法保证控制系统的大范围渐进稳定,会造成控制品质下降,无法达到期望的控制效果。另一方面,串级PID控制器设计时大多包含了多个控制回路,会造成控制器参数整定过程较为繁琐,对参数整定经验具有较强的依赖性。
云模型是一种新兴的不确定性智能控制算法,它的基本思想是通过数学的方法对语言值中出现的大量模糊性和随机性概念进行刻画,找出两者之间的关联并进行不确定性转换。云模型定性推理方法具有不要求控制系统给出被控对象的精准数学模型的优点,同时可以保留被控对象及其环境中各种未知的不确定性因素[10-11]。
1 四旋翼无人机非线性模型
四旋翼无人机通过调整四个旋翼的转速,进行六个自由度的运动,是一个典型的欠驱动系统,选择灵活性和动态性能较好的“X”字机体坐标系的四旋翼无人机作为研究对象。
根据欧拉旋转定理,通过三次坐标变换就可以使地理坐标系和机体坐标系重合,得到地理坐标系(Xg,Yg,Zg)转换到机体坐标系(Xb,Yb,Zb)的旋转矩阵
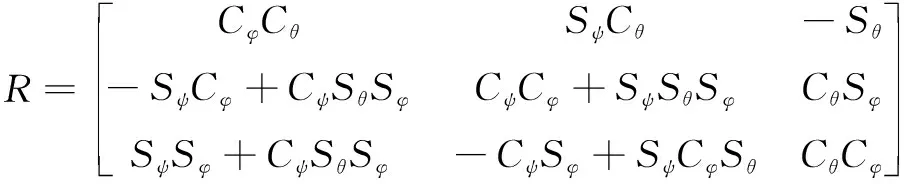
(1)
其中,C表示cos,S表示sin。
根据牛顿第二定律,在地理惯性坐标系中可以得到四旋翼无人机分别在外合力F和在外合力矩τ作用下的运动方程。
无人机在外合力F作用下的线运动方程

(2)
无人机在外合力矩τ作用下的角运动方程
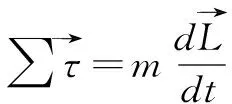
(3)

假定四个电机的转动轴与机体始终完全垂直,电机转动过程中产生的升力完全垂直于机体平面,即完全指向Zb轴方向,设单个电机转动时旋翼产生的升力为Fi,FB为无人机在三个方向上的受力情况,则FB的表达式为

(4)
利用坐标转换矩阵可将该受力转换到地面坐标下的受力,其中Fx,Fy,Fz分别为分解到地面坐标Xg,Yg,Zg轴上的分力。
(5)
根据牛顿第二定律,四旋翼无人机在地理坐标系的速度状态方程为
(6)
四旋翼无人机在地理坐标系的位置状态方程为

(7)
令四旋翼无人机绕机体坐标轴旋转的转矩为τφ、τθ、τψ,则
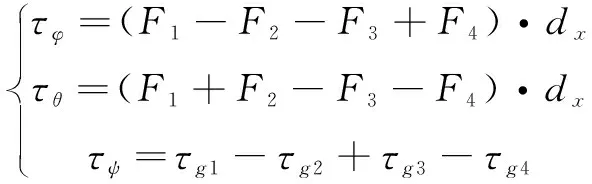
(8)
其中,dx为电机质心到机体坐标系原点的距离。
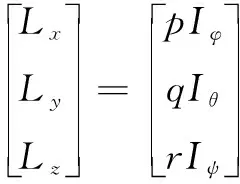
由式(3)可知,根据运动质点系的动量矩定理,选择机体坐标系的原点作为质心,则在四旋翼无人机机体坐标系内表示的动量矩为

(9)

(10)
假设四旋翼无人机是质量不变的刚体,所以惯性矩和惯性积都可以看作时不变的常量,得到

(11)
由式(11)可以得到在机体坐标系中飞行器在合外力矩作用下的角运动方程组
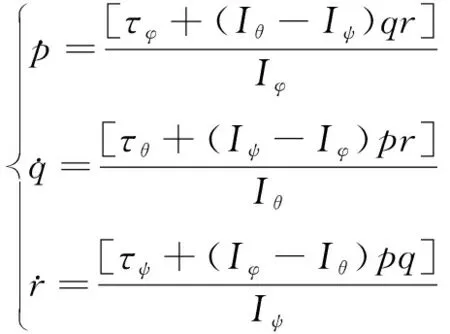
(12)
由式(12)和机体坐标系与地面坐标系的旋转矩阵,可以求解得到欧拉角计算公式
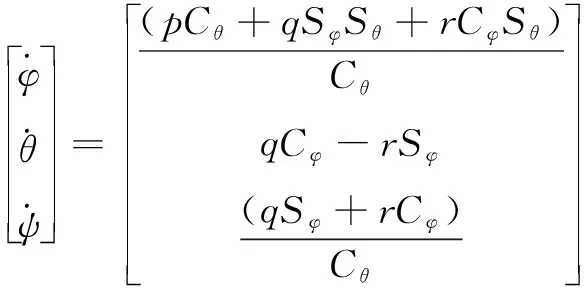
(13)
四旋翼飞行器在飞行的过程中,旋翼转动产生的升力通过一定的角度倾斜后分解为绕Xb、Yb、Zb轴的旋转分力和沿Zb轴向上的分力。定义U1、U2、U3、U4为控制系统四个独立输入量,其中,U1是绕Xb轴的旋转分力,U2是绕Yb轴的旋转分力,U3是绕Zb轴的旋转分力,U4是沿Zb轴向上的分力。
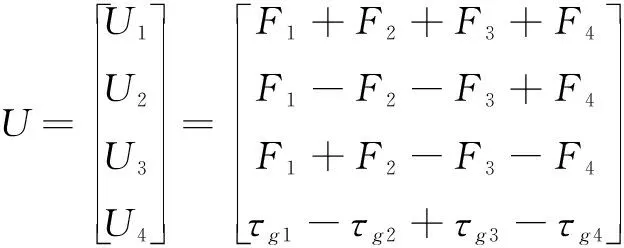
(14)
2 一维云模型控制器设计
2.1 云模型概念
云模型是一种为了实现定性概念与定量数值之间的相互转化,将随机性和模糊性结合在一起的一种不确定性关系的转换模型。它通过概念云的三个数字特征:期望Ex、熵En和超熵He将概念的随机性与模糊性融为一体。鉴于云模型算法对不确定性模型具有良好的数学特性,在复杂的非线性控制系统中可以使用云模型来表示其中存在的大量不确定性现象。
2.2 一维云模型控制器原理
一维云模型控制器所实现的输入输出控制是一种映射关系,即偏差输入到控制量输出的映射。如图1所示,一维云模型映射器的不确定性多规则推理部分是由多个单条件单规则推理组合而成。通过输入前件论域中的定量值x刺激云模型映射器中每一条独立的单条件单规则推理的前件云发生器CGX1~CGXN产生相对应的确定度值μ1j~μNj,再经过后件云发生器CGY1~CGYN计算各个确定度对应的云滴隶属度生成大量云滴drop(yNjk,μNj),最后对所有产生的云滴和它们相对应的激活强度通过加权平均计算得到定量输出y。

图1 一维云模型映射器
算法步骤:
输入:一维云模型映射器规则库中第i条推理规则的前件定性概念的云模型数字特征(Exxi,Enxi,Hexi)和后件定性概念的云模型数字特征和(Exyi,Enyi,Heyi),前件论域U1中的定量值x。
输出:后件论域U2中的定量值y。

2.3 一维复合云模型控制器设计
如图2所示,一维复合云模型映射器分别将从偏差e、偏差积分ei和偏差微分ed到控制输出的映射称为一维云模型映射器的P、I和D。在一维复合云模型控制器中的P、I和D不再是简单的比例-积分-微分关系,而是可以通过云模型映射来满足各种线性和非线性被控对象的控制要求,并且可以实时在线根据控制对象的状态变化采取相应的控制调整策略,具有较好的智能控制特性。在控制的实现形式的层面上,一维P+I+D型云模型映射器属于一维云模型映射范畴,它们之间的主要区别在于不同含义的输入参量,一维复合云模型控制器是直接将偏差、偏差的积分值及偏差的变化率作为控制系统的输入。
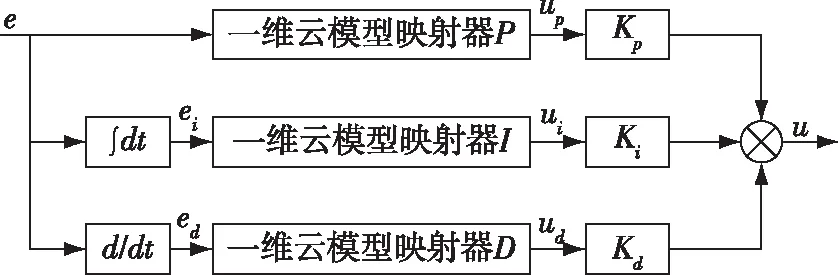
图2 一维复合云模型映射器
基于一维复合云模型控制器的四旋翼无人机控制系统如图3所示,整个控制系统由4个独立的一维P+I+D型云模型控制器(CMC+)组成,分别控制四旋翼无人机的滚转、俯仰、偏航和高度方向上的运动。每个P+I+D型云模型控制器由三个一维云模型映射器组成,以高度控制器CMC-Z为例,Km(m=1~3)为一维复合云模型控制器的量化因子,Kn(n=4~6)为驱动因子,Kp、Ki和Kd分别为比例、积分和微分控制输出的调节参数。
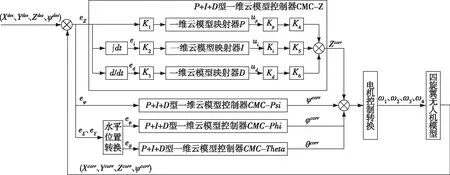
图3 四旋翼无人机控制系统框图
定义输入和输出变量的云模型数字特征如表1所示,一维复合云模型控制器中的一维云模型映射器采用七规则推理,变量e、ei、ed的输入论域为[-1,1],变量up、ui、ud的输出论域为[-1,1],这里-1表示-100%,1表示100%。
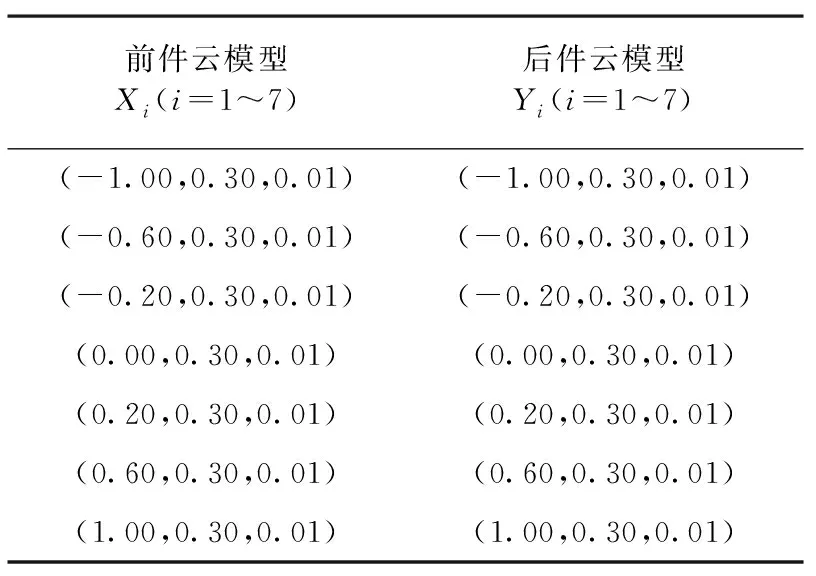
表1 CMC+的输入输出变量云模型数字特征
3 仿真与测试
本文利用Matlab中Simulink模块分别搭建基于一维云模型控制器的四旋翼无人机控制系统和基于传统PID控制器的四旋翼无人机控制系统,对其进行仿真对比。参考文献[6-9],选取合适的四旋翼飞行器参数见表2。其中,g表示重力加速度,d是每个电机到四旋翼飞行器中心的距离,m是四旋翼飞行器的质量,CT是单个电机的推力系数,CQ是单个电机的转矩系数,Jx、Jy、Jz分别是X轴、Y轴、Z轴的惯性矩,Jm是每个电机的旋转惯性,CR是节流阀百分比到转速的转换系数,b是节流命令关系中线性回归关系的Y轴截距。

表2 飞行器模型参数
本文以滚转角φ的一维复合云模型控制器为例,如图4所示。在相同的被控对象、外界环境条件和输出控制调节参数的情况下,将基于传统PID控制器的四旋翼无人机控制系统和基于一维复合云模型控制器的四旋翼无人机控制系统的控制效果进行比较。通过四旋翼无人机的位置状态变化和姿态角的偏差变化来反映两种控制器的控制效果。
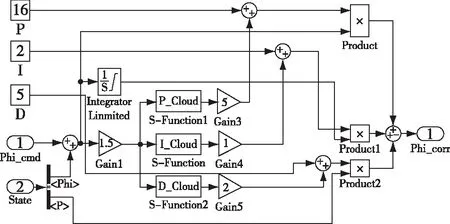
图4 滚转角φ的一维复合云模型控制器
假设四旋翼无人机的初始位置和偏航角度为(0 m,0 m,0 m,0°),期望位置和期望偏航角度为(3 m,4 m,5 m,60°),在没有外界干扰的情况下,仿真结果如图5~10所示。

图5 X轴位置坐标变化曲线

图6 Y轴位置坐标变化曲线

图7 Z轴位置坐标变化曲线
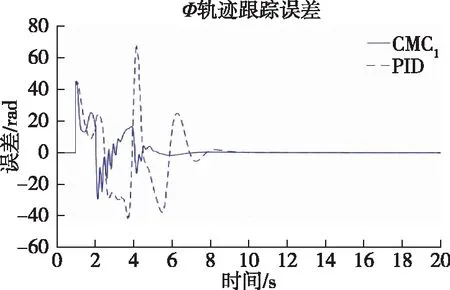
图8 Phi轨迹跟踪误差
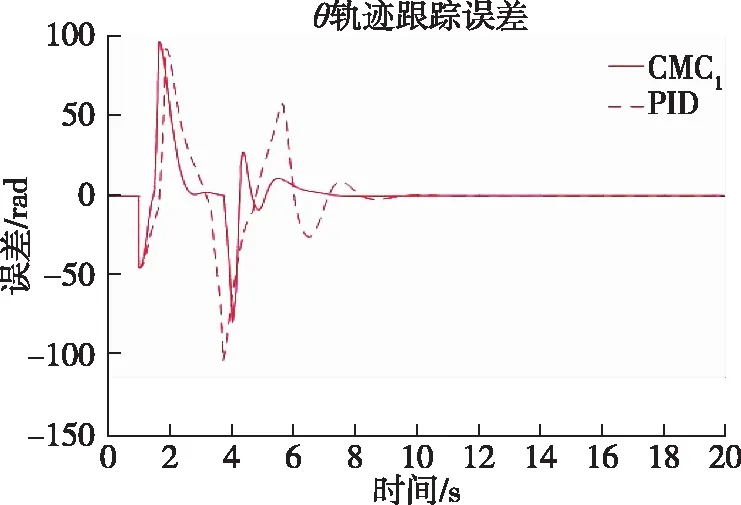
图9 Theta轨迹跟踪误差
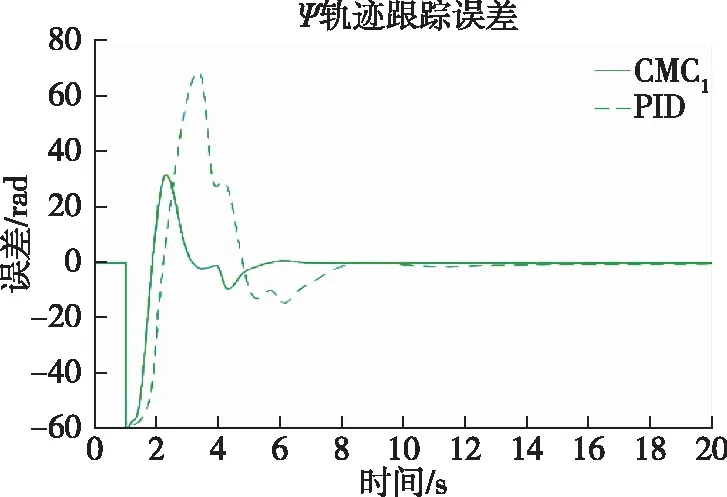
图10 Psi轨迹跟踪误差
由图5~10可知,在一维复合云模型控制器和传统PID控制器控制下的四旋翼无人机均可达到期望位置坐标并保持稳定,与传统PID控制器相比,对四旋翼无人机进行位置坐标控制时,一维复合云模型控制器控制下的四旋翼无人机在位置坐标变化时响应速度较快,稳定时间较短,并且能够在更短时间内到达期望位置;由控制系统姿态角误差追踪曲线可知,一维复合云模型控制器控制下的四旋翼无人机能够更快、更稳定地通过改变姿态角响应位置变化命令。
为了验证一维云模型控制器在受到扰动因素下的控制效果,将对四旋翼无人机三个姿态角方向分别施加脉冲干扰和正弦干扰进行仿真试验。
如图11~13所示,仿真时间为10 s时分别向四旋翼无人机的三个姿态角方向施加振幅为2的脉冲信号干扰,由仿真结果可知,在相同的控制参数下,一维云模型控制器控制下的四旋翼无人机具有较好的抗干扰能力,可以在较短的时间内修复偏差并保持稳定。

图11 脉冲干扰下Phi轨迹跟踪误差
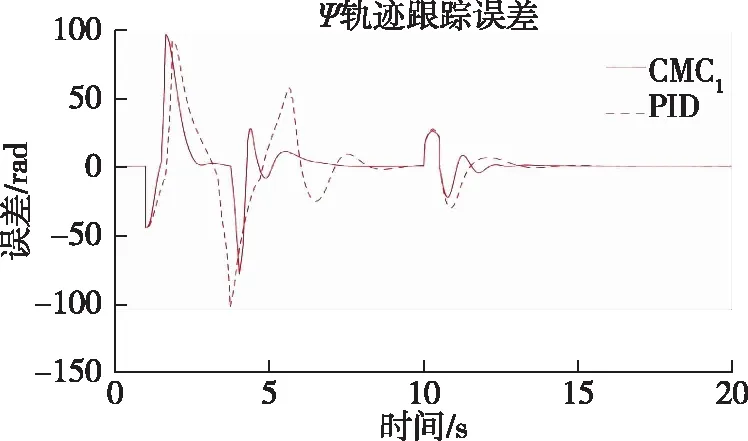
图12 脉冲干扰下Theta轨迹跟踪误差

图13 脉冲干扰下Psi轨迹跟踪误差
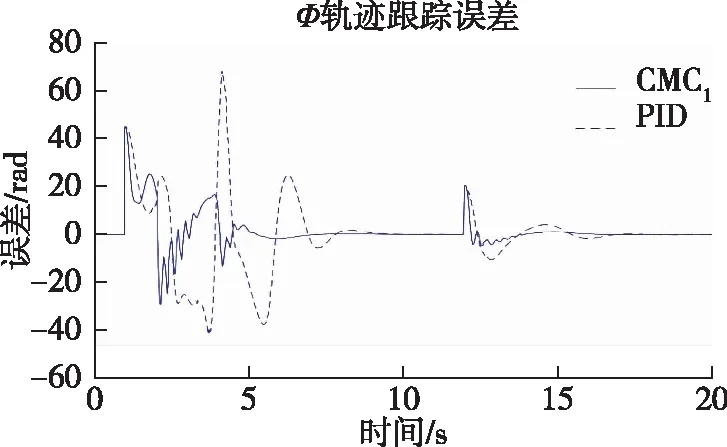
图14 正弦干扰下的Phi轨迹跟踪误差

图15 正弦干扰下的Theta轨迹跟踪误差
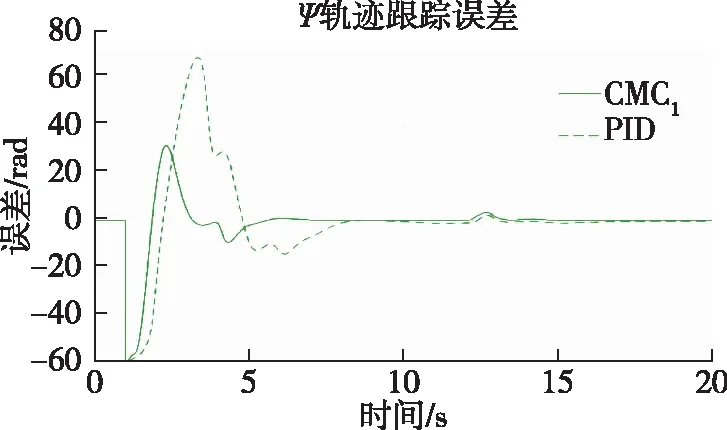
图16 正弦干扰下的Psi轨迹跟踪误差
由图14~16所示,仿真时间12s时分别对四旋翼无人机的三个姿态角方向施加一组正弦波干扰,由仿真结果可知,一维云模型控制下的四旋翼无人机在干扰下轨迹偏差较小,恢复时间较快,抗干扰效果要优于传统PID控制器。
综上所述,基于一维复合云模型的四旋翼无人机控制系统可以较好地实现四旋翼无人机的位置和姿态控制,确保各状态大范围渐进稳定,具有良好的适应性和鲁棒性,并且在增加外部扰动之后,抗干扰能力也要优于传统PID控制器。
4 结束语
本文在分析四旋翼无人机非线性运动特征的基础上,重点对一维复合云模型控制器及其在四旋翼无人机控制系统中的应用进行研究,经仿真验证,能够满足四旋翼无人机飞行控制的要求,具有良好的适应性和鲁棒性,为四旋翼无人机的智能控制提供了一种新的技术实现途径。
