基于时域滤波的GPS导航接收机抗干扰算法仿真及性能评估
2018-10-18张道成
张道成
(中国人民解放军91404部队,河北 秦皇岛 066000)
1 接收机抗干扰的必要性
随着信息技术的发展,人们对于导航定位的要求越来越高,不仅表现在民用技术上,在军用技术上表现的更加突出,举例来说美国战斧巡航导弹的精确打击,导弹经发射平台发射后,再向前推进,然后转变成为巡航飞行并在计划的路线上航行,离不开卫星导航定位的支持。
导航的精确定位,与卫星接收机息息相关。而一旦卫星信号遭到敌方干扰,极有可能中断工作,也可能使导航系统陷入瘫痪终止工作,对用户造成极大的损失。而一旦军队的卫星系统遭到干扰不能及时解决,空降部队可能失去地面目标,战略部队可能无法精确对敌实施打击,对一支军队来说,其后果必将是致命的。近些年的国际一些经典战例,无一不体现了这一点。
在信息化战争中,接收机的抗干扰技术显得尤为突出和重要,系统的发射频段基本相同,比较公开化,通信噪比又比较低,因而对敌方来说,要进行干扰或欺骗不是一件困难的事。具体来说:一是接收机信号接收功率较小的现实导致容易受到干扰;二是接收机的抗干扰裕度较小容易受到干扰;三是卫星导航系统本身存在一定的缺点,容易被敌方发现并被实施干扰。
本文主要是在研究GPS导航接收机的抗干扰基础上,总结了目前接收机抗干扰信号处理的几种主要方式,从时域滤波的基本原理入手,研究分析了基于时域滤波的抗干扰算法,同时对基于时域滤波的GPS导航接收机抗干扰算法进行了仿真验证,最后根据滤波器输出信噪比与接收机跟踪载噪比两种方法实现了抗干扰算法的评估。
2 抗干扰算法研究进展及基本原理
2.1 发展现状
干扰容限反映了扩频系统接收机可能抵抗的极限干扰强度,但是实际系统中,依靠扩频技术所能容纳的最大干扰功率与信号功率之比为30dB,因此必须寻求其他办法。如果在接收端解扩相关处理前利用信号处理技术对干扰进行抑制滤波处理,则可提高接收机的抗干扰能力,系统性能得到进一步改善[1]。干扰抑制本质上来说就是提取有用的信号,最大限度地压制无用信号。通常信号处理干扰抑制技术可分成三种:时域的滤波器处理(Time Domain Processing)技术、变换域处理(Transform Domain Processing)技术和空域自适应滤波(Spatial Adaptive Filter)技术。
2.2 时域滤波的基本原理
20世纪60、70年代,时域滤波技术得到发展,主要是线性滤波的方法[2]得到长足发展,是指完成信号处理滤波功能的,输入是一组数字量,其输出是经过变换的另一组数字量具有稳定性高、精度高、灵活性大等优点。本文以IIR为例,介绍如下。
IIR滤波的系统函数为
(1)
将式(1)改写成下式,当M=N时
(2)
(3)
故得
(4)
其时域表示为
(5)
第二级系统实现极点为
(6)
其时域表示为
(7)
3 时域滤波抗干扰算法
自适应横向滤波器(Adaptive Transversal Filter,ATF)在扩频通信中得到了广泛的应用,它用于抑制窄带干扰。基本原理就是:有用信号和噪声在整个通带内的功率谱是平坦的,只占据了一部分带宽,适当的采样率时,不同时刻不相关,可以用过去或未来的信号采样进行预测,把预测值和当前信号值进行减法计算,保留有用的信号。线性预测滤波器具有单边抽头结构,它利用过去信号采样值估计当前时刻的信号;线性插值滤波器具有双边抽头结构,它同时利用过去和未来的信号采样值估计当前时刻的值,Li Loh-Ming等人研究表明[3],当干扰频率靠近扩频信号的载波频率时,线性插值滤波器比抽头数相同的线性预测滤波器抗干扰性能好,这里采用线性插值结构滤波器,如图1所示。

图1 线性插值滤波器结构
3.1 维纳解
ATF的输入信号向量记为
u(k)=[x(k),…,x(k-M+1),x(k-2M)]T
(8)
ATF的系数向量记为
h(k)=[h-M(k),…,h-1(k),…,h-M(k)]T
(9)
u(k)表示k时刻滤波器的输入信号向量,h(k)表示k时刻滤波器的系数向量。滤波器的输出信号为
y(k)=[x(k)-hH(k)]u(k)
(10)
这个输出为当前时刻的信号与当前时刻信号的估计值之差。常用的一个调整滤波器系数h(k)的准则是最小均方误差准则,定义代价函数为
J(h=E[y(k)y*(k)])
(11)
满足最小均方误差准则时,h使J(h)最小。求h(k)的最优值,忽略标号k,把J(h)展开得,
J(h)=E[(x(k)-hHu(k))(x(k)-hHu(k)*]=
E[(x(k)x(k)*]-hHE[u(k)x*(k)]-
E[x(k)uH(k)]h+hHE[u(k)u]=
E[x(k)x*(k)]-hHrx-rHh+hHRxxh
(12)
其中,
rx=E[u(k)x*(k)]
(13)
Rxx=E[u(k)uH(k)
(14)
为求J(h)的最小值,求J(h)对h的梯度,即式(12)对h*求导,得到
(15)
令式(15)为0,求得最优的滤波器系数向量为
(16)
这个最优解称为维纳解。
3.2 自适应LMS算法
自适应算法采用归一化最小均方(LMS)算法,由其创始人Widrow和Hoff命名。LMS算法是随机梯度算法族的一员,基于梯度估计的最陡下降原理,通过对目标函数进行适当调整简化为对梯度向量计算,它利用一个权值修正量对当前时刻的权值进行修正后得到下一时刻的权值,算法简便,计算量小,不需要矩阵求逆,易于实现[4]。LMS算法是线性自适应滤波算法。
梯度向量的瞬态估计为
(17)
将上式重新代入,有
(18)
算法基本步骤描述如下:
初始化:h(1)=[0,0,…0]T(2M×1)
x(k)=0(n≪0),x(n)=0,(n≪0)
当k≪M时,h(k+1)=h(k);
当k>M时,y(k)=x(k-M)-hH(k)u(k)
(19)
h(k+1)=h(k)+μ(k)y(k)
(20)
3.3 归一化自适应LMS算法
归一化LMS和标准LMS的基本结构基本一致,都不是纵向滤波器,其差距就是权值控制器的机理,用在了横向滤波器中,反复迭代直至滤波器达到稳定状态,我们可把NLMS滤波器看作对普通LMS滤波器所做的性能改进,可以把NLMS算法看作是时变步长参数的LMS滤波器。权向量的更新表达式为
(21)
其中,u(k)表示抽头输入向量u(k)的平方欧氏范数。

4 抗干扰算法仿真及性能评估
4.1 仿真论证
仿真中时域滤波均采用31阶插值滤波器,干扰频率为46.52 MHz,将频率归一化后相当于0.499π,分别求出维纳解、LMS解、NLMS解。
如图2所示,这三种算法所形成的凹陷几乎相同,维纳解的相位连续性最好,NLMS算法与LMS算法的相位变化几乎相同。在所有算法中,LMS算法是最简单的,易于实现。但是,NLMS滤波器与维纳解的滤波器系数最为吻合,如图3图所示。因此,在时域滤波中应首选NLMS算法。而且NLMS算法有一个优点,不用实时更新滤波器系数,如果干扰类型变化不是很快,可以将之前计算出来的滤波器系数应用到当前的滤波中,而其他算法则必须实时计算滤波器系数才能达到抗干扰效果。
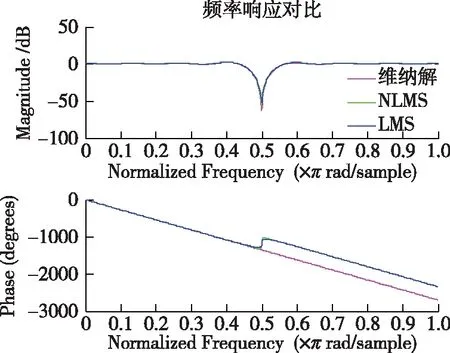
图2 三种算法频率响应对比

图3 LMS、NLMS与维纳解对比
4.2 性能评估
为了客观地对所研究的抗干扰方法进行性能评估和比较,建立合理的抗干扰性能评估方案。本文提出一种在GPS导航接收机输入输出端联合对抗干扰性能进行评估方案。确定对滤波器性能进行评估的方案,主要为如何选定滤波器各参数提供理论依据。主要介绍两种评估方法:一是利用滤波器输出信噪比对滤波器进行评估;二是利用导航接收机对滤波后的信号跟踪,统计载噪比来对滤波器性能评估。
首先分析利用滤波器输出信噪比评估性能,主要估计信号通过抗窄带滤波器后信噪比的改善情况[4]。首先我们介绍由于加入滤波器在信号相关后的信噪比提高的算法,然后通过仿真验证该算法。
综上所述,常规用药联合无创呼吸机治疗COPD并呼吸衰竭的应用效果确切,可有效改善病情,改善血气和生命体征,对预后有益,值得推广应用。
对于导航信号来说,对信噪比的定义不是唯一的,因为这是和信号带宽相联系的,不同带宽噪声的功率是不同的。导航接收机的输入热噪声为:
Ni=kTBwatts
(22)
式中k为波尔兹曼常数,即k=1.38×10-23 J/K;T是温度;B是接收机带宽,单位是Hz,Ni是噪声功率,单位为瓦。在室温下(T=290 K),热噪声的功率为:
Ni(dBm)=10 log(138×10-23×290×1×1 000)=
-174 dBm/Hz=10log(138×10-23×290×106×
1 000)=-114 dBm/MHz
(23)
当只有导航信号功率为-130 dBm~-110 dBm,无干扰信号,输出信噪比与理论信噪比比较情况如图4所示。
由图4所示,在无干扰情况下,滤波器输出信噪比与理论信噪比基本一致。
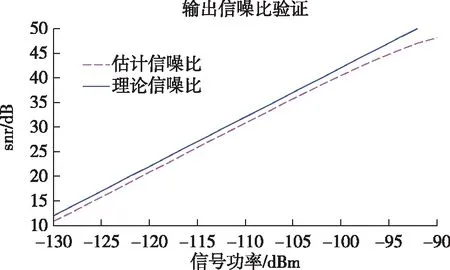
图4 滤波器输出信噪比与理论信噪比比较
信噪比的改善情况为:
对于导航信号来说,对信噪比的定义不是唯一的,因为这是和信号带宽相联系的,不同带宽下噪声的功率是不同的。导航接收机中积分清除时间T的大小,决定了累加之后的信噪比,因为1/T是累加之后的信号带宽。所以T越大,信号带宽越小,噪声功率越小,信噪比越大。假定T=1 ms,那么累加之后的信号带宽就是1 kHz,这时的噪声功率是-174+10log 1 000=-144 dBm,如果信号功率为-130 dBm,信噪比就是-130+144=14 dB。

图5 抗干扰后信噪比的改善情况
如果信号带宽缩小到1 Hz,那么计算出来的信噪比就叫做载噪比。载噪比与信噪比之间的换算公式为:
(24)

表1 无干扰时信噪比估计与载噪比估计对比
根据式(24),当T=1 ms时,载噪比与信噪比应相差30 dB,但是此式中的信噪比计算方式与表1中的信噪比计算方法不同。式(24)中的信噪比的理论依据是根据信号带宽的变化计算的,信号原来带宽为20 MHz,积分累加后变为1 kHz,相当于噪声减少了10*log10(20M/1K)=43.01 dB;其中的信噪比计算理论依据是扩频信号的作用,认为累加后由于扩频信号的作用,信号增强了10*log10(10230)=40.01 dB。因此表1中的信噪比应与载噪比理论上相差33 dB,而实际大约相差32.5 dB,基本与理论符合,所以认为信噪比的估计与载噪比的估计都是正确的。
5 结束语
随着抗干扰技术的迅速发展,对时域滤波抗干扰提出了新的要求,时域滤波器虽然有自身优势,但是对于宽带干扰和快速扫频干扰还是效果不佳。在今后的发展中,应对空域滤波或空时联合滤波做深入研究,空域滤波可以有效抑制宽带干扰,空时联合滤波在空域滤波基础上做了改进,可以增加抗干扰个数,如应用到实际中,有着深远意义。
