HXMT卫星时间同步系统设计
2018-10-18,,
,,
(北京空间飞行器总体设计部,北京 100094)
0 引言
硬X射线调制望远镜(HXMT)卫星[1]是我国第一颗空间天文卫星,用于实现宽波段、大视场X射线探测,卫星有效载荷分为高能X射线探测器(HE)、中能X射线探测器(ME)[2]、低能X射线探测器(LE)和空间环境监测器(SEM),通过载荷光轴(星体+X轴)对天指向实现对目标的观测。卫星于2017年6月15日11时在酒泉卫星发射中心成功发射。
HXMT卫星通过巡天观测、定点观测、小天区扫描等多种方式实现宽波段X射线(1~250 keV)高灵敏度和高分辨率观测,为满足卫星控制系统和有效载荷设备对卫星时间高精度同步的需求(≤10 μs),本文设计了适用于空间科学试验卫星的时间同步系统,通过GPS校时[3]、星时总线广播、硬件秒脉冲输出等多种方式实现了一般精度时间同步系统和高精度时间同步系统,用于满足卫星不同的用户需求。
1 时间同步系统方案
卫星时间同步系统是向卫星各个终端用户提供标准时间信号和标准频率信号以实现整个卫星的时间统一,由各种电子设备及相关协议算法组成的完整系统,如图1所示。卫星时间系统需要根据卫星任务需求如目标定位精度、事后处理需求等进行合理设计。
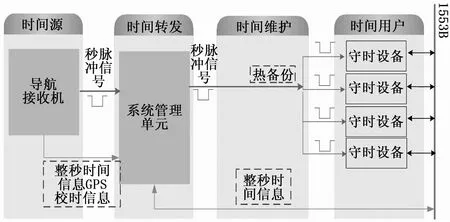
图1 时间同步系统示意图
卫星时间同步系统主要包括授时部分和守时部分:
1)授时部分包括时钟源、时间传递和保持设备等。时钟源的作用是使时间码产生器对频标源输出的频率信号进行计数产生本地时间,与外部输入的时间基准进行比对后,按照一定的时间编码格式输出参考时间。时间传递与保持设备将这一参考时间传送给守时部分;
2)守时部分通常由时间信息接收部分、本地时间码生成器及用户等组成,主要完成对授时部分发送时间信息的接收、对本地时间校正及时间应用等。目前卫星设计方法中守时部分常存在于星上各个终端用户中。
HXMT卫星时间同步系统由四部分组成:卫星中央处理单元(CTU)时间初始化及恢复系统、卫星校时系统、一般精度时间系统和高精度时间系统。HXMT卫星时间同步系统如图 2所示。
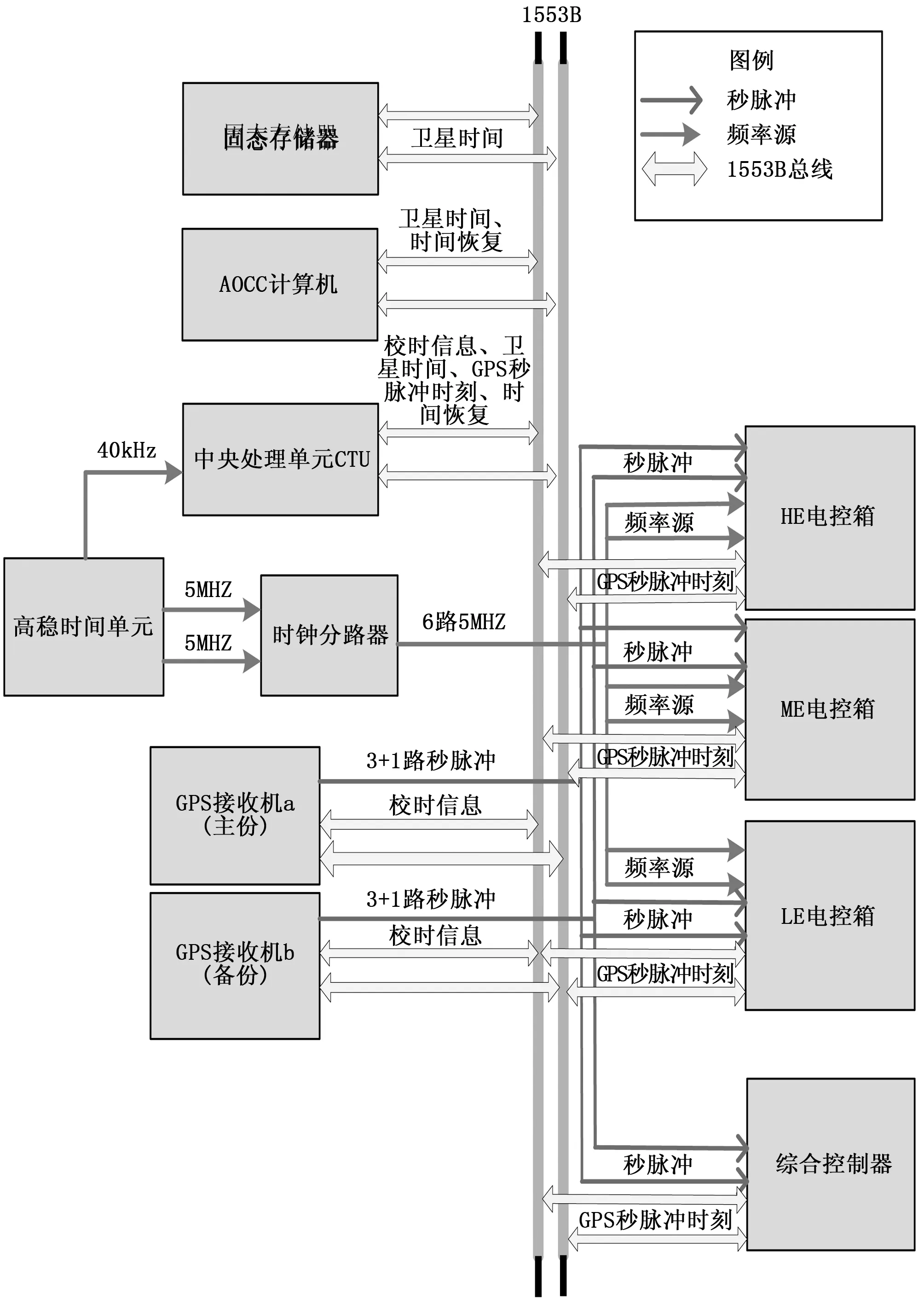
图2 HXMT卫星时间同步系统框图
HXMT卫星时间同步系统说明如下:
1)频率基准
(1)频率基准可以为数管CTU、有效载荷设备(高能、中能、低能电控箱和综合控制器)提供时钟驱动信号。HXMT卫星的频率基准由高稳时间单元提供,分为40 kHz方波信号和5 MHz正弦信号;
(2)高稳时间单元输出1路40 kHz方波信号,作为数管CTU的驱动信号,当该路信号失效时,CTU会自动切换到内部40 kHz晶振;
(3)高稳时间单元输出2路5 MHz正弦信号,经时钟分路器分路后,输出6路5 MHz的高稳定时钟信号(高能、中能、低能电控箱各两路),作为有效载荷的时钟信号。
2)校时
(1)卫星在轨主要使用GPS校时,正常工作时由数管CTU和GPS接收机共同完成GPS自主校时和GPS强制校时功能;
(2)当GPS接收机出现故障或者不需要GPS校时时,地面还可以使用集中校时和均匀校时等地面遥控校时方式对卫星进行校时操作。
3)时间广播和发送
(1)CTU通过总线广播卫星CTU时间,1秒1次,A、B总线交替广播;
(2)CTU周期性查询由GPS接收机发出的“请求总线控制器索取GPS秒脉冲对应整秒时刻”服务请求,每125 ms查询一次;查询到服务请求时,CTU通过总线取回GPS秒脉冲对应整秒时刻[4],并在0.5 s之内通过总线广播,由高、中、低能载荷以及综合控制器对该信号进行接收和使用;CTU获取整秒时刻数据失败时,把有效标识置为无效后广播;
(3)CTU通过总线向控制计算机(AOCC)发送CTU时间,1分钟1次。
4)GPS秒脉冲与GPS秒脉冲对应整秒时刻
(1)GPS接收机在每个协调世界时(UTC)整秒时刻通过RS422接口分别为高、中、低能有效载荷和综合控制器提供两路整秒脉冲信号,两台GPS接收机在提供整秒脉冲信号方面互为冷备份;
(2)GPS接收机在为有效载荷提供UTC整秒脉冲的同时,还将该脉冲对应的整秒时刻信息通过1553B总线发送至数管CTU,并由CTU再通过1553B总线向有效载荷设备进行广播。
5)时间恢复
CTU加电、复位或切机时,首先从AOCC恢复CTU时间;若恢复失败,则从GPS恢复CTU时间;若再次恢复失败,则设置CTU时间为默认值0。
2 CTU时间初始化及恢复
2.1 初始化策略
星上CTU加电、复位或切机时,CTU时间首先设置为初始值0,然后立即执行CTU时间恢复程序。CTU时间恢复过程中,CTU按照初始值0对卫星时间进行守时。如果时间最终恢复失败,CTU继续卫星时间守时。
2.2 星时恢复策略
CTU时间恢复程序执行过程为:CTU首先从AOCC恢复时间;若恢复失败,则从GPS接收机恢复时间;若再次恢复失败,则设置CTU时间为默认值0。
1)CTU从AOCC恢复时间流程如下:
CTU从AOCC恢复星上时间码时,进行两次操作:首先通过星上总线向AOCC发送用于作时间差值的时间码,等待1s后,向AOCC索取时间差。AOCC在接收到CTU传送的星上时间码后,应锁定本终端此刻的时间,进行相关误差消除和两者时间差值运算。CTU收到时差后,立即将该时差和本地守时时间进行相加。
数管CTU向AOCC发送的时间码格式如表 1所示。
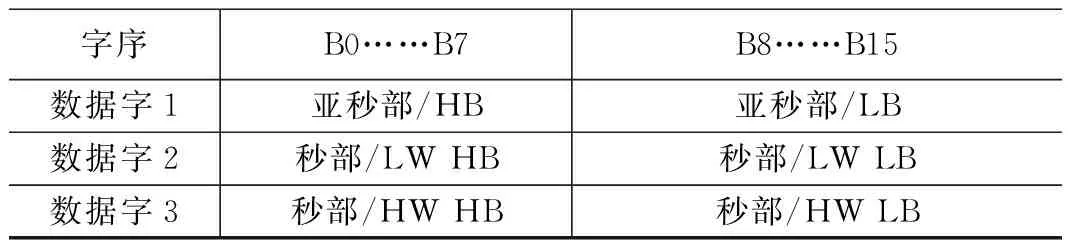
表1 AOCC/GPS校时用时间数据结构
注:1)亚秒部为每单位25微妙的计数;
2)秒部、亚秒部均为正值。
AOCC向CTU发送的时间差格式如表 2所示。
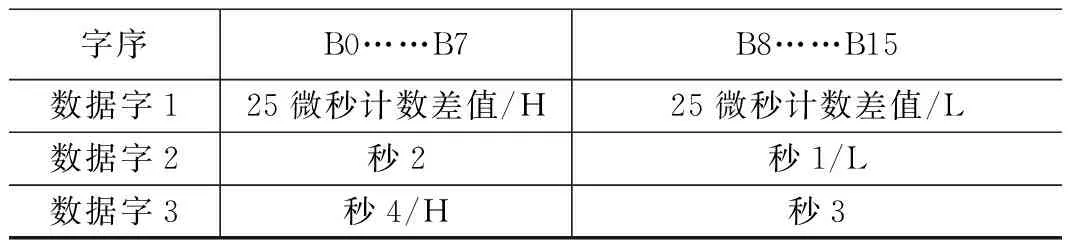
表2 CTU-AOCC时间差数据格式
注:1)25微秒计数始终为正值;
2)秒部为有符号数(二进制补码)。
2)CTU从GPS恢复时间流程如下:
CTU从GPS恢复星上时间码时,进行两次操作:首先向GPS发送用于作时间差值的时间码(时间码格式见表 1),等待1 s后,向GPS索取时间差。GPS在接收到CTU传送的星上时间码后,应锁定本终端此刻的时间,进行相关误差消除和两者时间差值运算。CTU收到时差后,立即将该时差和本地守时时间进行相加。
数管CTU向GPS发送的时间码格式如表 1所示,GPS返回的时差格式如表 3所示。
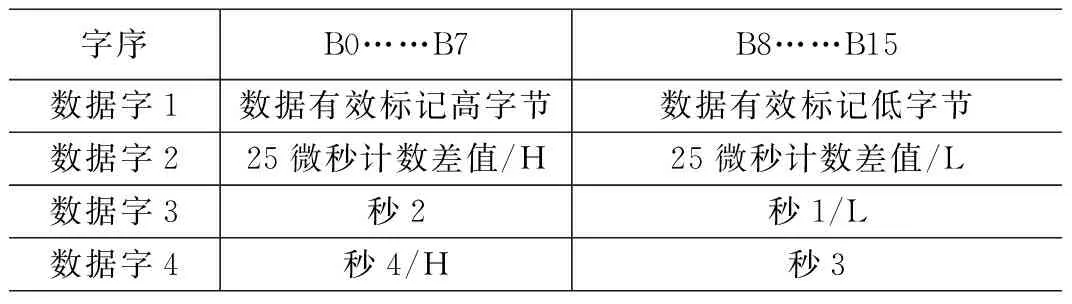
表3 GPS-CTU时间差格式
注:1)25微秒计数始终为正值;
2)秒部为有符号数。(二进制补码);
3)数据有效标志:0000H—有效,FFFFH—无效。
3 卫星校时
CTU在星上高稳时间单元40 kHz时钟的驱动下产生卫星CTU时间,并对产生的卫星CTU时间进行校准。卫星校时有两种方式:1)GPS校时[5];2)地面遥控校时。GPS校时包括GPS自主校时和GPS强制校时;地面遥控校时包括地面集中校时和均匀校时。
卫星校时系统由数管CTU、控制AOCC、测控GPS接收机和星上1553B总线组成。卫星两种校时方式间的切换由地面控制,通过上行注入“卫星自主GPS校时使能”、“卫星自主GPS校时禁止”两条命令实现两种校时方式之间的切换。
3.1 GPS校时
3.1.1 GPS自主校时
卫星在轨主要使用GPS自主校时来保证卫星CTU时间的准确。
CTU以1 min(±1 s)周期与GPS接收机进行1次计算时差操作,首先CTU向GPS发送“用于作时间差值的时间码”(时间码格式见表 1),延时1 s后向GPS索取时间差(时差格式见表 3)。
在自主GPS校时使能模式下,CTU对时间差进行判断。若时间差绝对值小于20 ms,则CTU以GPS时间为基准对卫星时间进行校准。GPS自主校时误差小于1 ms。每正确进行1次自主GPS校时,遥测“GPS校时计数”加1;若时间差绝对值大于20 ms,则放弃本次自主校时操作。
3.1.2 GPS强制校时
在某些特殊情况下,卫星以GPS强制校时的方式,来保证卫星CTU时间的准确。
CTU接收到上行GPS强制校时命令后,首先CTU向GPS发送“用于作时间差值的时间码”(时间码格式见表 1),延时1 s后向GPS索取时间差(时差格式见表 3),并无条件以时间差为基准对卫星时间进行校准。GPS强制校时误差小于1 ms。每正确进行1次强制GPS校时,遥测“GPS校时计数”加1。
GPS自主校时使能情况下,不影响GPS强制校时。
3.2 地面遥控校时
当GPS接收机出现故障,使得整星的GPS系统无法正常工作时,卫星会采用地面集中校时或地面均匀校时的方式,来保证卫星时间的准确。
3.2.1 地面集中校时
CTU接收到上行集中校时命令后,把地-星时间和星上时间做加法运算,使星上时间对准地面时间。CTU在星上时间整秒时刻时进行校时。地面集中校时误差小于5 ms。
地面集中校时时间格式如表 4所示。
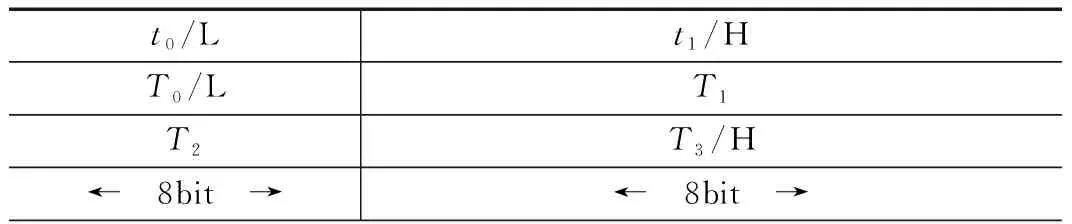
表4 地面集中校时时间格式
其中:
1)t0、t1为地-星时间25微秒计数差值,无符号整数,差值的低字节在前,高字节在后。
2)T0~T3表示地-星时间秒差值,有符号数,补码表示,T0为秒差值的最低字节,T3是秒差值的最高字节。
3.2.2 均匀校时
数管CTU接收到上行均匀校时命令后,根据指令内容,按照规定的时间间隔周期性的对星上时间拨快/拨慢1 ms,该操作必须在整秒时刻进行,执行时间间隔为1~65535 s。
均匀校时的执行时间间隔及均匀校时方式字作为CTU重要数据保存,且作为遥测参数下传。
CTU均匀校时指令时间格式如表 5所示。

表5 CTU均匀校时时间格式
其中:
1)执行时间间隔:取值范围1~65535 s;
2)均匀校时方式字:55H表示“停止均匀校时”,此时执行时间间隔为0;AAH表示“在执行时间间隔规定的时间拨快1 ms;FFH时表示在执行时间间隔规定的时间拨慢1 ms”。
4 一般精度时间系统
HXMT卫星一般精度时间系统[6]由CTU通过整星一级1553B总线发布时间码完成授时,各时间用户接收时间码完成守时。一般精度时间精确至秒级即可,由于需要和控制计算机、GPS接收机进行时差计算,因此对其精度要求为25 μs。
数管CTU以广播方式向远程终端传输星上时间码,周期为1 s。CTU应用软件从秒中断中获取星上时间,对取得的时间进行延时补偿处理后,发起通信,发送传输给各时间用户。广播中的时间为时间码最后1比特通过总线传输至各用户的时刻。经测试,软件处理延时补偿为41 μs,传输时延补偿为82 μs。
一般精度时间系统组成如图 3所示。

图3 一般精度时间系统组成框图
数管CTU在高稳时间单元提供的40kHz基准频率的驱动下产生卫星时间,并对产生的卫星时间进行校正,校正方式分为地面集中校时、均匀校时、GPS强制校时、GPS自主校时,其中GPS自主校时作为卫星在轨工作常态。
数管CTU通过1553B总线以广播的方式向所有远程终端发送经校正后及误差补偿后的卫星时间码,周期为1 s(±125 ms)。
授时部分为中央处理单元(CTU)、高稳定时间单元、整星一级1553B总线和相关硬件接口。高稳时间单元提供频标源(40 kHz),CTU通过定时器获得卫星时间微秒计数,生成一定格式的卫星时间,再经过总线传输给各个时间用户。
数管CTU在40 kHz时钟驱动下进行卫星时间的累积,同时辅以GPS自主校时功能完成卫星时间的守时。
5 高精度时间系统
HXMT卫星高精度时间系统通过GPS接收机的硬件统一校对时间基准,并通过1553B总线广播整秒时间码。工作过程如下:
1)GPS接收机开机等待定位:GPS接收机开机后立即开始输出秒脉冲信号和时间码数据,但此时由于GPS接收机并没有定位,因此输出的时间码数据无效,秒脉冲信号也不可用。当接收机定位后,一般情况下,在15分钟内完成调整秒功能,在调整秒期间,星上不能使用接收机授时功能;
2)秒脉冲接收端使用秒脉冲信号及整秒信息:用户终端收到秒脉冲信号,以及CTU通过总线发送的时间码数据后,作为时标信号,并依靠各自内部时钟进行计数,计算得到数据采样时对应的时间。
高精度时间系统组成如图 4所示。
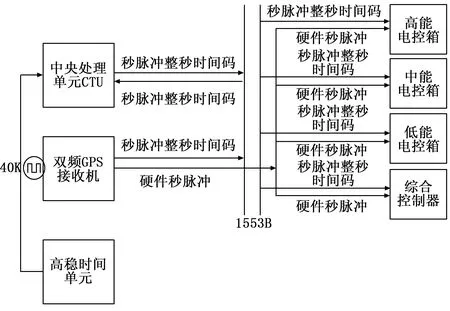
图4 高精度时间系统组成框图
GPS接收机输出8路硬件秒脉冲信号,通过RS422硬件通道,分别将脉冲信号分别传输给高、中、低能有效载荷和综合控制器。CTU通过1553B总线,广播秒脉冲信号对应的整秒时间,硬件秒脉冲信号与CTU广播出整秒时间的间隔不大于0.5 s。
5.1 高精度时间授时
高精度时统的授时部分为GPS接收机、CTU和相关硬件接口。授时的原理为:
1)硬件秒脉冲产生:GPS接收机捕获导航星并定位后,在每个整秒时刻会输出一个硬件秒脉冲信号(与GPS时间系统严格同步)以及对应的整秒时间信息;
2)硬件秒脉冲传输:GPS接收机秒脉冲信号通过RS422接口发送至用户终端;
3)用户终端设计相应的接收和处理电路,使用硬件秒脉冲信号和整秒时间信息完成本系统(设备)的时间校准。
GPS接收机是高精度时间系统的授时源,GPS接收机负责接收GPS导航信号,并从导航电文中提取时间信息,实现与GPS时间同步。GPS接收机开机后,处于非定位状态,此时GPS输出非整秒的硬件秒脉冲信号及时间码数据,不能完成授时功能。一般情况下,在15分钟内完成GPS接收机定位和调整秒功能,在GPS调整秒期间,星上不能使用GPS授时功能。GPS调完整秒后,每秒一次输出整秒脉冲给用户单元,并在125 ms之内将输出秒脉冲所对应的绝对时间信息送给数管CTU,CTU通过1553B总线以广播方式将此时间信息转发给各分系统终端设备。
5.2 高精度时间守时
守时端的基本原理是使用硬件秒脉冲信号对内部时标信号进行校正或标定,以获取测量数据相对于秒脉冲基准信号的偏差量。
用户终端工作期间,将同时接收来自GPS分系统的硬件秒脉冲和CTU转发的对应秒脉冲的整秒时刻数据。有效载荷信号处理器根据硬件秒脉冲启动本地1 MHz计时时钟对亚秒进行计时,同时利用本地1 MHz时钟通过对相邻2个秒脉冲的计时实现对时钟频率的标定,从而精确计算出每一行测量数据时刻,并在对应的辅助数据里标出。用户终端在收到GPS硬件秒脉冲后250 ms内收到CTU转发的对应秒脉冲的时间码数据。
6 时间精度分析
6.1 10 μs守时
当GPS接收机失锁非定位期间,整秒脉冲信号不准确,GPS秒脉冲对应整秒时刻给出无效标识。此时则需要利用守时系统保证在GPS接收机重新定位之前(HXMT卫星规定星载GPS接收机一次非定位时间不超过20分钟),为载荷提供的时间精度需优于10 μs。
当GPS出现非定位情况,使得GPS整秒脉冲信号和整秒脉冲对应整秒时刻信号输出不准确,有效载荷无法用该秒脉冲比对和UTC时间的差值,因此只能使用时钟分路器提供的5 MHz时钟信号(由高稳时间单元分路而来)来进行维持。此时影响守时精度的关键是5 MHz高稳信号的稳定性(抗漂移能力)。

表6 高稳时间单元技术指标
高稳时间单元与时钟分路器的技术指标如上表所示。对于守时精度分析,选择较为恶劣的长期稳定度进行分析,即载荷收到的时钟信号的频率为f×(1±5×10-9)Hz,则单个波形的持续时间为1/(f×(1±5×10-9))s。
以高能载荷分析为例,设n个波形累加之后的时间误差达到10 μs,所以有:
1/(f×(1±5×10-9))×n=t±10 μs
其中:t为守时误差达到10 μs时所经过的时间,n为t时间内累计的波形个数,由n、t和f的定义可得n=f×t,代入上式,可得:t≈2 000 s≈33 min。即高能载荷自GPS秒脉冲失效时刻开始,33分钟之内可以保证载荷与UTC时间的时间精度误差不超过10 μs。
使用相同的分析方法,对中能载荷和低能载荷进行分析,得到结论为:高、中、低能载荷可保证时间精度的守时时长均为为33 min。
6.2 1 ms校时
HXMT卫星对CTU时间的GPS自主校时精度[7]指标为优于1 ms。
该校时精度的保证需要GPS接收机端、CTU端和中间总线电缆3部分共同来完成。其中,总线电缆只带来ns级影响,可忽略不计,因此重点关注GPS接收机端和CTU端的影响之和是否超过1 ms量级。
1)GPS接收机端:HXMT卫星上使用的是GPS调整秒的方式,使得GPS校时可能会出现一个最大为505 μs的误差(即校时误差可能为0~505 μs的某个随机数)。
2)CTU端:CTU软件会在接收到“GPS-CTU”时差后,对自身软件产生的时延进行一个自校准,使得偏差在μs量级。此外,由于CTU时间的最小分层刻度为25 μs,即在进行索取“ GPS-CTU”时差时,可能出现的最大偏差为25 μs(0或25 μs的偏差)。
综上,由GPS和CTU共同产生的时间偏差不会超过600 μs,因此可以保证HXMT卫星OBDH时间的GPS校时精度优于1 ms。
7 星地测控对接试验
星地测控对接试验期间,在卫星校时测试的基础上进行了星地时延测试。测试时地面接收机输入信号S/Φ|c=75 dBHz,星上应答机输入电平为-80 dBm。在进行GPS校时之后,地面接收处理遥测数据,比对星上发送星上时间与地面收到遥测帧时标的时间差,计算星地设备时差[8]。计算公式为:
ΔT=Ts+(τg+τs+τgs+7.8125)-Tg
其中:Ts为遥测帧中星上时间,即帧首前沿产生时刻的星上时间;Tg为收到帧首后沿时刻的地面标准时间;τg为地面接收解调恢复遥测帧的固定时延,由测站提供;τs为星上由产生帧首前沿到发射出去的固定时延,由卫星方提供;τgs为由卫星到地面站信道时延,忽略不计,为0;7.812 5 ms为帧同步(1ACFFC1DH)固定传输时延。
根据上述公式,测试了10次星地时差的测试,均为-1.026 s,结果稳定,满足要求。
实际星地时延的计算结果为:
ΔT=Ts+(τg+τs+τgs+7.8125)-Tg=
(Ts-Tg)+τg+τs+τgs+7.8125=
-1026+2.16+1015.625+0+7.8125=-0.4025 ms
优于5 ms的星地时延要求。
8 在轨测试结果
HXMT卫星在轨运行期间,GPS自主校时功能运行正常。数管CTU与GPS校时周期为1 min(±1 s),校时误差约为22.5~77.5 μs之间,满足小于1 ms的指标要求。
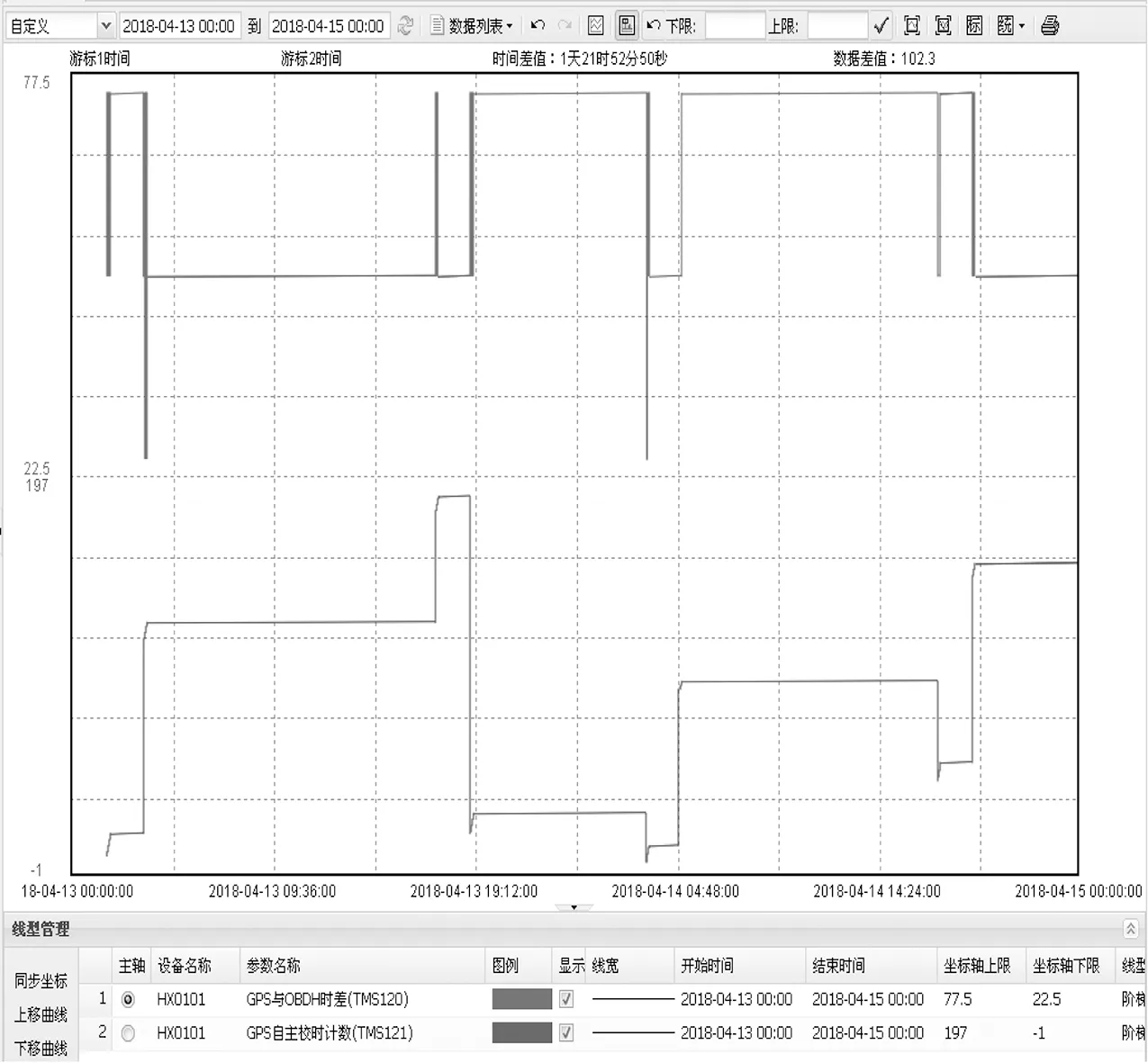
图5 在轨期间GPS自主校时时差
9 结束语
本文对HXMT卫星的时间管理模型、运行机制进行了描述,对卫星时间系统的设计方法和内容进行了详细说明,通过在星地测控对接实验、在轨运行结果对时间系统的性能进行了实际验证。经验证,HXMT卫星时间系统的设计完全满足卫星全生命周期飞行期间平台和载荷时间用户的使用需求,满足星地测控时间误差需求,满足卫星轨道姿态机动的时间需求。后续空间科学试验卫星时间同步系统设计时可以充分借鉴本设计方法。
