基于内模控制(IMC)的主汽温度控制系统设计
2018-10-18,,,
, ,,
(华北电力大学 控制与计算机工程学院,北京 102206)
0 引言
随着超超临界机组效率的提高,煤耗降低、污染物排放量较少,因此超超临界机组的经济效益十分可观。而过热蒸汽和再热蒸汽温度是1000 MW超超临界机组的两项重要指标,这两项指标直接影响着机组的安全性和经济性[1-5]。过热蒸汽温度和再热蒸汽温度直接影响火电厂的热效率,以及过热器和再热器及其管道、汽轮机等设备安全运行。无论是过热蒸汽、再热蒸汽温度过高还是温度过低对机组的运行都是不利的,严重超限的情况下,可能会造成电厂安全事故危机[6-9]。
目前国内外热电厂对过热器与再热器温度控制都使用闭环控制系统,PID控制规律简单且并不需要精确的控制对象模型,因此PID控制比较适合用于电厂大多数被控对象的控制。但是,实际工业生产过程中大多数具有非线性、时变不确定性,传统PID控制不能根据控制过程中的不确定性变化做出相应调整,不能达到理想的控制效果[10-13]。因此,本文提出了一种基于内模控制(IMC)的PID控制策略。
内模控制是一种基于过程数学模型来进行控制器设计的一种新型控制策略[14]。它具有设计简单、控制性能好、易于在线分析等优点。在工业控制过程中,与经典PID控制相比之下,内模控制仅有一个待整定参数,参数调整与系统动态品质和鲁棒性的关系明确,所以采用内模控制原理可以提高PID控制器的控制水平,可以有效改善过热蒸汽和再热蒸汽温度控制的动态特性[15]。
1 内模控制原理
1.1 基本原理
内模控制(Internal Model Control简称IMC)是一种基于过程数学模型来进行控制器设计的一种新型控制策略。它不仅是一种实用的先进控制算法,而且是研究预测控制等基于模型的控制策略的重要理论基础,此外还是提高常规控制系统设计水平的有力工具,其基本原理如图1所示[16]。
图1 内模控制基本原理图
其中:R(s)为给定值信号,GIMC(s)为IMC控制器,D(s) 为扰动信号,Y(s)为输出信号,Gp(s)为被控对象,Gp`(s)为估计模型。
内模控制器的特点:
1)理想控制器:若估计模型和被控对象完全匹配,即Gp`(s)=Gp(s),并且模型稳定情况下,若设计的IMC控制器满足:
GIMC(s)=Gp`(s)-1
(1)
同时,估计模型Gp`(s)存在且可以实现,则得到:
Y(s)=R(s)设定值扰动下
(2)
Y(s)=0外界干扰下
(3)
这就意味着系统可以克服任何干扰,而且可以实现对输入信号的无偏差跟踪。当被控对象非最小相位过程时候,不能直接采用理想控制器,需要进行模型分解,再利用分解出来的有稳定零点和稳定极点的部分设计控制器。
2)对偶稳定性:在估计模型与被控对象传递函数有精确匹配的情况下,即当IMC控制器和估计模型均开环稳定时,IMC控制器的闭环也是稳定的。
3)稳态无差性:当估计模型精确匹配时候,IMC控制器可以保证稳态无差。
当被控对象和估计模型失去匹配的时候,只要控制器的稳态增益和模型的稳态增益乘积是1,对于阶跃输入和常值干扰均不存在稳态偏差。
4)鲁棒性:可以看到的是,IMC控制器的对偶稳定性是在假设估计模型精确匹配实际对象的模型的基础上得出的。这个条件在实际中很难保证。因此,在模型与对象失去匹配性的时候,即使对象和控制器均稳定,也不一定能保证闭环系统的稳定性。所以,需要专门考虑IMC控制器的鲁棒性问题。
在IMC控制器中,通过在控制器前添加一个滤波器来实现的。
1.2 一阶惯性环节加纯迟延环节的内模控制器设计
本文中过热汽温和再热汽温控制系统的过程辨识模型,最终均化简为一阶惯性环节加纯迟延环节模型,该模型能够较好的模拟实际生产过程中单输入单输出过程[17]。
已知一阶惯性加纯迟延环节如下:
(4)
将已知的过程模型分解为以下两部分:
(5)
Gp2(s)=e-τs
(6)
为了避免噪声的放大导致模型与实际过程失去匹配性,需要引入一阶惯性环的滤波器,即F(s):
(7)
根据SIMC整定规则:
内模控制的滤波器时间常数等于过程模型的等效滞后时间[4]。得到内模控制器:
(8)
IMC控制器的优点是控制器的参数是唯一的且直接与模型的参数相关,在IMC控制器中,只有一个可以调节的参数θ,并且该参数决定了系统的响应速度。此外,参数θ近似的与闭环带宽成正比,可以获得一个参数θ的一个初始估计值,可实现在线调整[18]。
2 系统设计
本文以1000 MW的电厂机组对象开展过热蒸汽温度和再热蒸汽温度控制策略设计,分别选取了额定工况下和80%额定负荷下的过热气温和再热气温的传递函数作为研究模型对象,分析了模型匹配情况下和模型失配情况下,分析比较了传统PID控制器、IMC控制器,并分析比较不同控制器的抗干扰能力。此外,分析当IMC控制器参数θ发生变化时对控制效果的影响。
2.1 模型匹配情况下,额定负荷1000 MW的温度控制系统IMC控制设计
2.1.1 1000 MW二级过热器出口温度控制
广义被控对象传递函数:
(9)
由1.2章节IMC控制器的设计方法,设计IMC控制器:
(10)
在Matlab软件的Simulink环境中搭建模型进行仿真:

图2 蒸汽温度控制系统加扰动信号的IMC控制器和PID控制器模型
图2中设计实际PID控制器为如下形式:
(11)
其中利用过程控制中介绍的工程整定法,整定实际PID控制器参数,进行微调得到如下参数:P=3.085,I=0.080,D=-22.676,N=0.136,用所得参数设定PID控制器。调节IMC控制器参数,得到合适的控制效果,得到θ=7的相应仿真结果如图3所示。

图3 1000 MW二级过热器出口温度加扰动信号IMC和PID控制
2.1.2 1000 MW主蒸汽温度控制
广义被控对象传递函数:
(12)
(13)
在Matlab中搭建模型参考图2,其中利用过程控制中工程整定法,整定实际PID控制器参数,进行微调得到如下参数:P=1.605,I=0.049,D=0.021,用所得参数设定PID控制器。调节IMC控制器参数,得到θ=12。得到相应仿真结果如图4所示。
图4 1000 MW主蒸汽温度加扰动信号的IMC和PID控制
2.1.3 1000 MW再热蒸汽温度控制
广义被控对象传递函数:
由2.2章节IMC控制器的设计方法,设计IMC控制器:
(14)
(15)
在Matlab中搭建模型参考图2,其中利用过程控制中工程整定法,整定实际PID控制器参数,进行微调得到如下参数:P=1.839,I=0.065,D=9.322,N=0.035;调节IMC控制器参数,得到θ=15。得到相应仿真结果如图5所示。
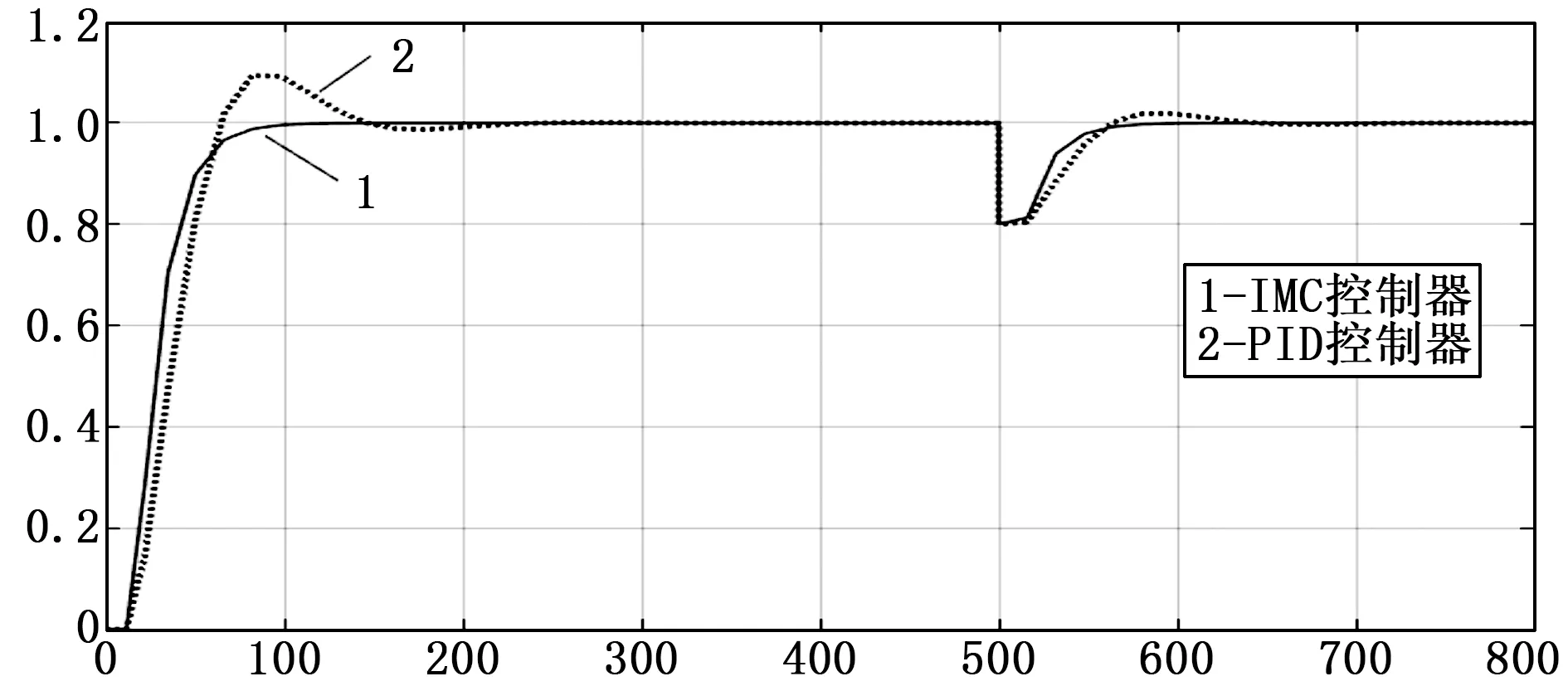
图5 1000 MW再热蒸汽温度加扰动信号IMC和PID控制
由以上三组仿真实验对IMC控制器和PID控制器进行比较可以知:实际PID控制器控制效果有超调,且反应速度较慢,调节时间较长;而采用IMC控制器,控制效果较好,无超调,且响应速度快,调节时间短。在t=500 s 时刻加入一个小扰动信号,观察PID控制器和IMC控制器的控制效果。可见PID控制器和IMC控制器均能完全消除干扰,但是IMC控制器反应速度快得多,而且控制效果无超调,能实现快速调节作用,表现出良好的抗干扰性,具有更好的控制品质。
此外,IMC控制器只有一个待整定参数,且待整定参数与期望的过程响应之间有着明确的关系,明确了参数整定的方法,预期目标值明确。这点是IMC控制器优于PID控制器的重要一点[19-20]。
IMC控制器设计简单,调节参数少而且调节的方向明确,鲁棒性好,实际工程中可以采用IMC控制器与PID控制器相结合互补的原则,来设计工业控制器,将成为更为实用优质的控制方法。
2.2 模型失配情况下,80%负荷800 MW温度控制系统IMC控制设计
本文在章节2.1中详细分析了在输入信号阶跃变化和扰动阶跃信号作用下,额定负荷1000 MW超超临界机组过热汽温和再热汽温控制系统输出响应。在模型匹配的情况下设计了IMC控制器与传统PID控制器控制效果相比较。在80%额定负荷下800 MW机组汽温控制系统与章节2.1中分析的额定负荷下1000 MW机组汽温控制系统类似,所以本小节主要针对模型不匹配的情况进行分析。
本章节主要选择800 MW二级过热器出口温度控制系统来进行分析,而800 MW主蒸汽温度控制系统和再热蒸汽温度控制系统与之相类似,在此不重复分析。广义被控对象传递函数:
(16)
由1.2章节IMC控制器的设计方法,设计IMC控制器:
(17)
根据SIMC整定规则,内模控制器的滤波器参数等于过程模型的等效滞后时间,即θ=12。
另一种方法整定IMC控制器参数,基于最大灵敏度的IMC控制器参数整定:
最大灵敏度Ms:是开环传递函数的Nyquist曲线到临界点(-1,j0)点的最短距离的倒数。一般情况下,鲁棒性指标是幅值裕度和相角裕度,而最大灵敏度指标能同时满足幅值裕度和相角裕度,因此可选择最大灵敏度作为闭环系统的鲁棒性指标[21]。

(18)
(19)
一般,最大灵敏度取值范围是[1.2,2],此时对应幅值裕度取值范围[6.0,2.0],对应相位裕度取值范围[49.2,29.0]。
取Ms=1.8,由滤波器参数与Ms的对应关系得到θ=7.6。
在Matlab的Simulink环境中搭建模型如图6所示。
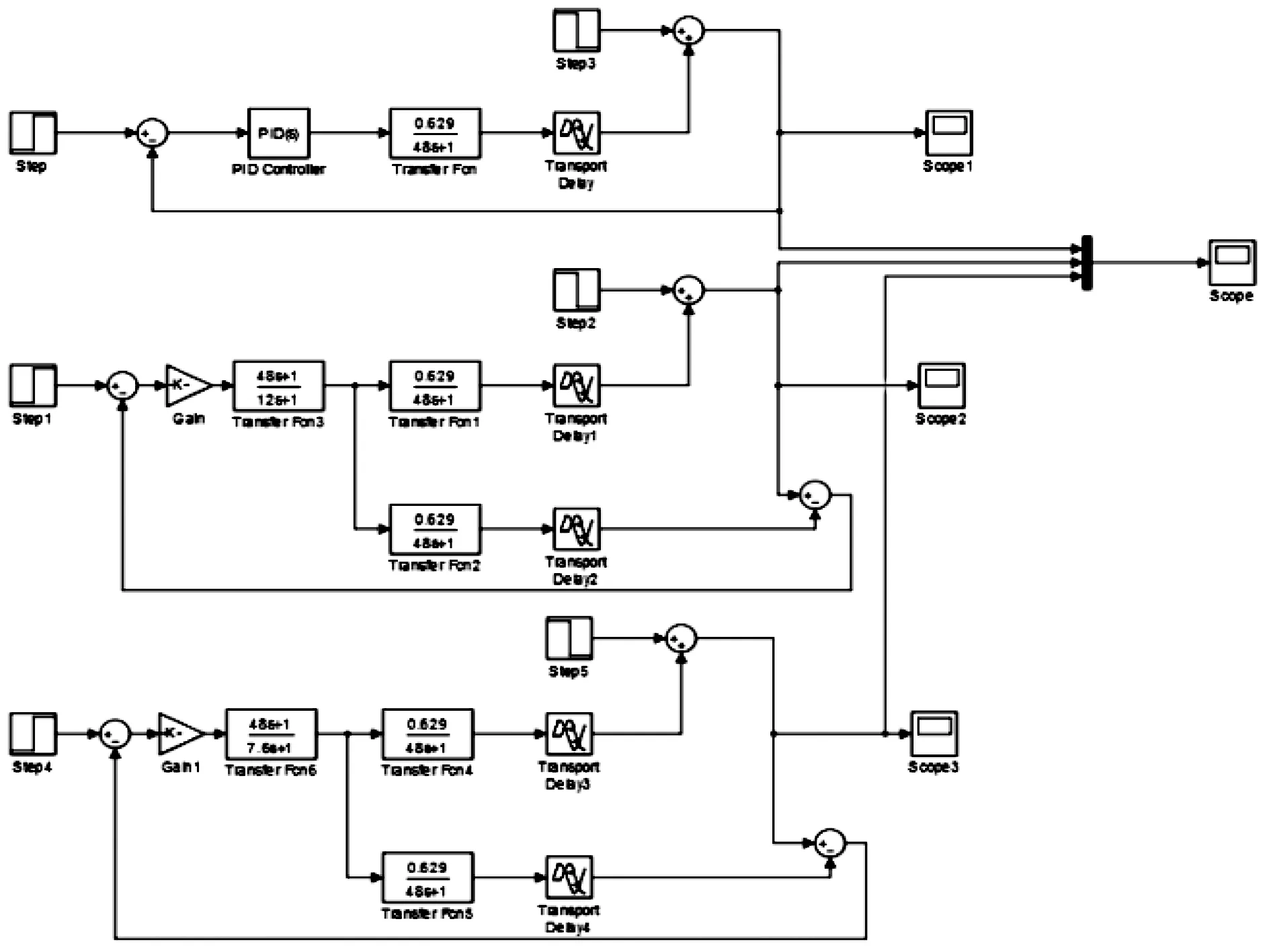
图6 温度控制系统两种参数IMC控制与PID控制的比较模型
在Matlab的Simulink环境中搭建模型如下:
其中,整定实际PID控制器得到如下参数:P=2.752,I=0.065,D=-6.484,N=0.044;根据SIMC整定方法,得到IMC控制器参数θ=12;基于最大灵敏度的参数整定方法,得到IMC控制器参数θ=7.6。
得到仿真图形如图7所示。
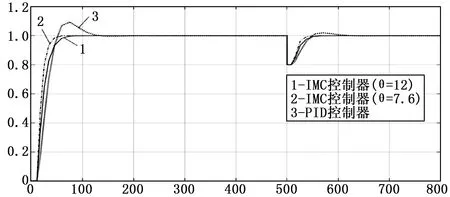
图7 模型匹配时不同参数IMC控制和PID 控制比较
由图7可知:实际PID控制器控制效果有超调,且反应速度较慢,调节时间较长;在模型匹配的情况下,IMC控制器控制效果更好,无超调,调节时间短。随着可调节参数θ的减小,响应速度加快。
实际被控对象参数发生变化时,实际系统参数是随环境和时间变化的,为了考虑鲁棒性,假定被控对象参数K,T和τ发生20%的参数摄动,造成模型失配。
得到相应曲线如图8所示。由图8可知,在实际被控对象参数发生变化时,IMC控制器的控制效果虽然受到了影响,但是相对比较稳定。当过程模型失配时,IMC控制器可调参数θ越大,控制效果越稳定,具有较好的鲁棒性。
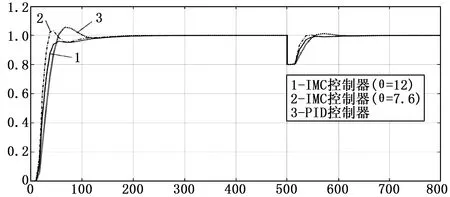
图8 模型不匹配时不同参数IMC控制和PID 控制比较
考虑到实际系统的参数,会随着环境和时间的变化而变化,造成过程模型和实际过程的失配。一旦发生失配,系统性能会变差,甚至不稳定。在设计内模控制器的过程中,要考虑到如何使得闭环系统对参数变化不敏感,鲁棒性成为闭环系统的一个重要特征。鲁棒性的指标一般有增益裕度和相位裕度。但是特设情况下,如某系统有异常的频率响应特性曲线,这两个指标不能很好地表征系统鲁棒性。而满足灵敏度约束就一定满足增益裕度和相位裕度,反之不一定成立。所以,一般选择最大灵敏度作为闭环系统的鲁棒性指标。
根据最大灵敏度与IMC控制器唯一可调节参数θ之间的函数关系,整定IMC控制器;根据SIMC整定方法,整定IMC控制器得到不同的参数θ。结果表明,当过程模型匹配时,参数θ越小,响应随度越快,调节时间越短,无超调且ITAE值较小;当过程模型不匹配时,即被控对象参数K、T、τ等发生数摄动,参数θ较大时,调节过程更稳定,抗干扰能力更强鲁棒性更好。
3 实验结果与分析
本文选取了超调量和调节时间作为比较指标,对PID控制器效果与IMC控制器效果相比较,更直观地体现IMC控制器的优越性。此外,采用SIMC规则和最小灵敏度规则两种方法整定IMC控制器参数,分析比较了过程模型匹配和模型失配两种情况下IMC控制器的控制效果。结果表明,在模型失配情况下,同一被控对象在变工况下IMC控制效果更加稳定,并且在一定范围内IMC控制器可调参数θ越大,控制效果越稳定,具有较好的鲁棒性。
