干扰状态下卫星导航接收机跟踪环路相位误差分析
2018-10-17王彦朋王晓君
◆王彦朋 康 娇 王晓君
干扰状态下卫星导航接收机跟踪环路相位误差分析
◆王彦朋 康 娇 王晓君
(河北科技大学信息科学与工程学院 河北 050000)
在不考虑多路径和其他干扰的情况下,载波环与码环对信号的相位测量均存在一定的由热噪声所致的相位抖动误差。首先介绍了一种常见的根据热噪声均方差估算公式得到相位误差的方法;其次通过Matlab仿真程序得到接收机跟踪阶段的环路模型,并在锁定状态下,根据跟踪结果统计得到载波环/码环的相位误差,将此误差与根据热噪声均方差公式得到相位误差进行对比;接着在跟踪环路中加入不同类型的干扰信号,计算跟踪结果,得到不同类型干扰与相位误差的关系,并与公式计算得出误差值进行对比分析;最后,改变干扰信号的功率,得出干扰信号功率与相位误差的关系。
卫星导航;用户接收机;干扰;跟踪;载波环;码环;相位误差;热噪声
0 引言
目前,很多国家已经将卫星导航的干扰与干扰提升至“导航战”的高度,即围绕卫星导航所展开的利用与反利用。由于接收机接收到的卫星信号微弱,所以很容易遭到来自敌方的破坏和干扰[3]。目前干扰卫星导航的技术体制主要有压制和欺骗两种,而相对来说常见的是对卫星信号的压制干扰[1][2]。
对卫星导航接收机进行干扰的核心问题就是干扰效果的分析,这也是导航对抗技术研究的关键。而本文对干扰状态下接收机跟踪环路的影响分析主要是围绕相位测量误差进行的。文中简单阐述卫星导航接收机跟踪环路信号处理过程后;根据对跟踪过程的分析,引出码环与载波环中相位测量误差;建立接收机跟踪环路的数学模型,实际统计测量得到相位误差;向跟踪环路中施加不同功率的高斯白噪声干扰与窄带干扰,观察不同载噪比或干噪比之下码环与载波环的相位测量误差;仿真分析了不同压制干扰对相位测量误差产生的影响。本文所做仿真均在RDSS信号模型下进行,其中载波环的噪声带宽为18Hz,码环的噪声带宽为2Hz。
1 GPS接收机跟踪状态分析
GPS接收机在获得卫星信号的载波频率和码相位的粗略估计值后,即转入跟踪状态[3]。

图1 接收机跟踪环路
如图1所示,中频信号sIF(n)先以数字形式输入,与载波环中本地复现载波进行混频,其中与正弦载波在I支路上相乘,与余弦载波在Q支路上相乘;然后,码环过程复现的超前、即时和滞后C/A码分别与两个支路上得到的混频结果i和q进行相关;接着用积分-清除器处理相关结果iE,iP,iL,qE,qP和qL并得到相干积分结果IE,IP,IL,QE,QP和QL;之后,把即时支路上的相干积分值IP和QP输入到载波鉴相器中,其他两路上的相干积分值则送到码环鉴别器中;最终,两个环路将会对鉴别输出结果进行滤波,并根据此结果来控制各自的数控振荡器,调节其输出相位和频率等状态,让载波环复现的载波与接收到信号中的载波一致,与此同时,码环复制的即时C/A即时码与接收信号中C/A保持一致,以便能彻底剥离接收信号中的载波与伪码。
2 针对跟踪状态的干扰效果分析
分析接收机跟踪过程可得知,跟踪环路都有一定的抗噪声容限,所以在跟踪过程中均存在相应的相位误差,即载波相位测量误差和码相位测量误差。

(1)
其中:

(2)
码环的测量误差源主要包括由热噪声所致的码相位抖动和动态应力误差两部分。码相位抖动误差可用式(3)进行估算:
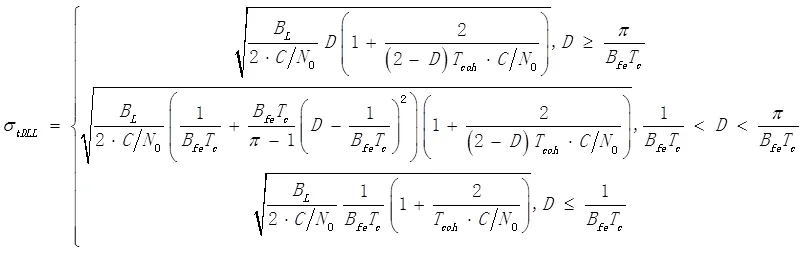
由此可见,载波环与码环的相位误差均与接收信号的载噪比有关系。无干扰时可用载噪比C/N0即载波功率与噪声密度的比值来表征。当存在非白色干扰时,非白色干扰也必须被计算在内,并且必须要以功率谱密度来表征。因此若能虚构一个白噪声密度,产生一个与实际混合白噪声和干扰相同的输出噪声的功率谱,即等效白噪声。由于这个等效白噪声类似于白噪声的性质,具有恒定的功率谱密度,则利用载波功率与等效噪声谱密度比,即等效载噪比[C/N0]eq来表示[5][6]。
3 压制干扰对接收机跟踪环路的影响建模及分析
3.1 信号模型
跟踪环路接收信号模型为:

(4)
其中,s(t)为RDSS信号,包括载波与伪码;n(t)为接收机内部噪声,建模为双边功率谱密度为N0/2的带限零均值高斯白噪声;j(t)为向跟踪环路施加的压制干扰,包括高斯白噪声干扰与窄带干扰两类[7]。
3.2 高斯白噪声干扰下跟踪环路相位误差分析
在高斯白噪声干扰下,改变信号与噪声之间的C/N0能在一定程度上影响码环与载波环对相位误差的测量。由于SNR的应用与噪声带宽有关系,因此利用C/N0来表示信号与噪声之间的关系[8]。由式(2)和式(3)可以得到理论情况下,码环与载波环在不同C/N0下对应的相位测量误差。接着,在跟踪环路模型中改变输入C/N0的大小,统计得到在不同载噪比下码环与载波环的相位测量误差,如图所示。
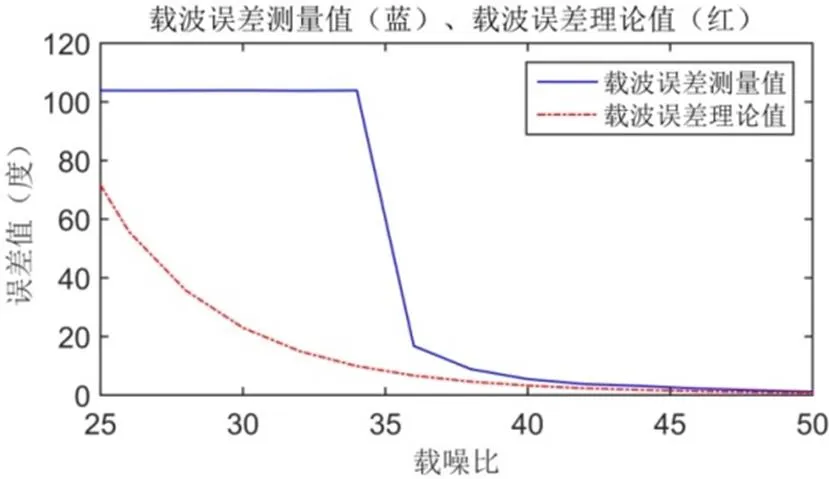
图2 不同载噪比下载波环相位误差
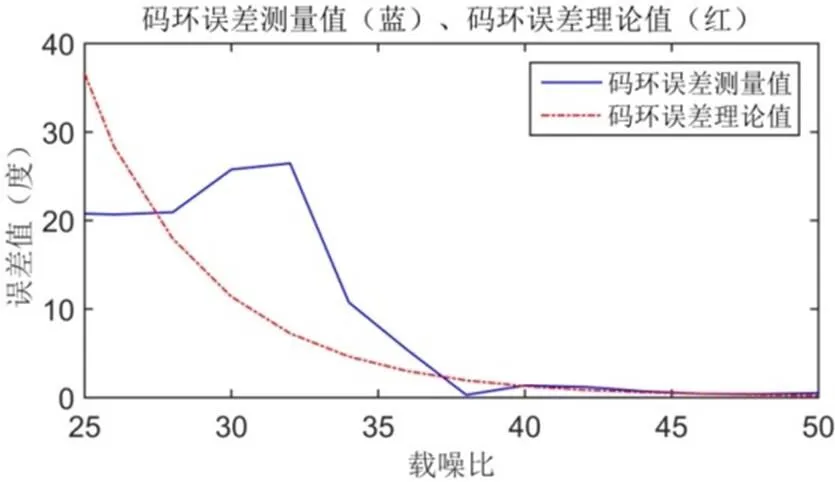
图3 不同载噪比下码环相位误差
从图2中可以得出,当C/N0在34dBHz以下时,载波跟踪环路失锁,相位测量理论值与统计得到相位误差相差甚大。由此可见失锁状态下,相位误差测量公式不适用;当C/N0在34~40dBHz之间时环路跟踪不稳定,统计得到的相位误差与相位测量理论值逐渐趋于一致;当C/N0大于40dBHz时,环路跟踪逐渐稳定,此时统计得到的相位误差与理论得到的相位误差基本一致。同样,从图3看到,在码环中,当C/N0在34dBHz以下时,跟踪环路失锁,相位测量误差公式不适用;当C/N0在34~40dBHz之间时环路跟踪不稳定,统计得到相位误差与相位测量理论值逐渐趋于一致;当C/N0大于40dBHz时,环路跟踪逐渐稳定,此时统计测量得到的相位误差与理论得到的相位误差基本一致。
3.3 窄带干扰下跟踪环路相位误差分析
跟踪环路中施加单频干扰,干扰的频率对准RDSS的中频频点。此时,对接收机跟踪的影响相当于在热噪声基座上附加干扰。当给定[C/N0]eq时,可以得到干扰信号的功率PJ,进而得到干信比JSR。在一定范围内改变[C/N0]eq,可以得到不同[C/N0]eq下对应的码环与载波环相位测量误差。图4与图5分别显示了不同干扰功率下对码环与载波环的误差影响。
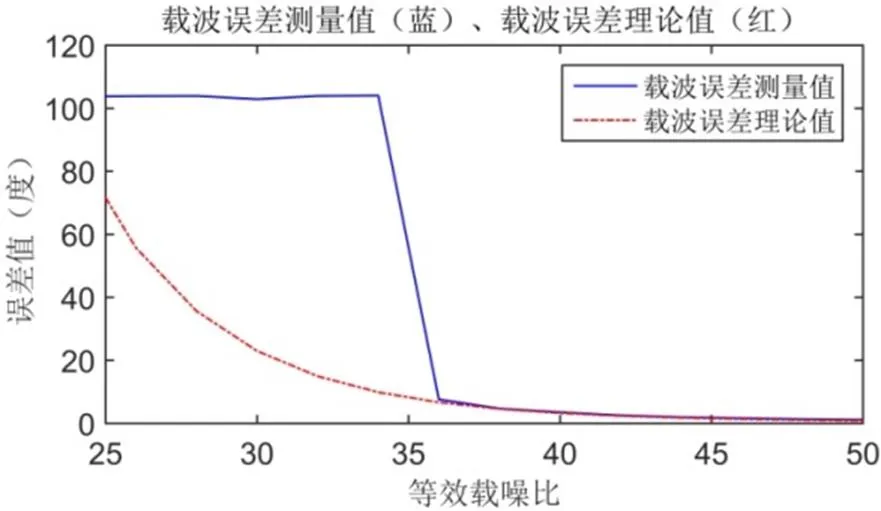
图4 不同等效载噪比下载波环相位误差
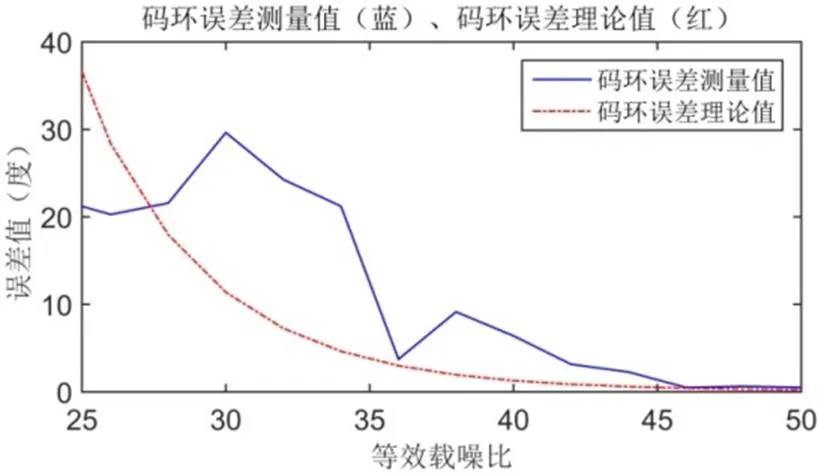
图5 不同等效载噪比下码环相位误差
从图4中可以看到,载波环路中,当[C/N0]eq小于34dBHz,即干信比大于35dBHz时,环路失锁,此时由公式得到的相位测量理论值不符合实际情况,统计得到的相位误差基本恒定;当[C/N0]eq在34~37dBHz之间时,环路跟踪不稳定,此时统计得到的相位误差随着[C/N0]eq的增大而减小,且比相位测量理论值减小的速度快;当[C/N0]eq在37dBHz以上,即干信比小于32dBHz时,跟踪环路能够成功跟踪上带有干扰的信号,统计得到相位误差与相位测量理论值基本一致。同样,从图5中可看到,在码环中,当[C/N0]eq在小于34dBHz时,环路失锁;当[C/N0]eq在34~46dBHz之间时,环路跟踪不稳定,统计得到相位误差与相位测量误差理论值的差异随着干扰信号功率的增大而增大;当[C/N0]eq大于46dBHz,即干信比小于21dBHz时,环路跟踪逐渐稳定,统计得到的相位误差与理论得到的相位误差基本一致。
4 结论
本文通过对接收机跟踪环路中信号处理的简单介绍,引出环路相位测量误差的相对概念。之后通过跟踪环路模型的建立与仿真,统计不同干扰与不同干信比之下载波环与码环的相位误差,并与由公式得出的相位误差测量理论值进行对比分析。最终,我们可以得出以下结论:在环路跟踪稳定状态下,可以直接通过相位误差测量公式得到环路具体的相位误差;在环路失锁状态下,环路实际测量得到的相位误差其实是不会随着干扰信号功率的变化而大幅度变化的;在环路跟踪不稳定状态下,随着干扰信号功率的不断增加,实际测量得到的相位误差亦处于变化状态。
[1]Jeong, Seongkyun, and S. S. Chen. GNSS Interference Signal Generation Scenario for GNSS Interference Verification Platform[J]. International Conference on Control, Automation and Systems,2015.
[2]S. Jeong, T. Kim, and J. Kim, Spoofing Detection Test of GPS Signal Interference Mitigation Equipment, International Conference on ICT Convergence,2014.
[3]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[4]赵新曙,王前.压制式干扰对GNSS接收机的影响及应对策略[J].全球定位系统,2014.
[5]朱海,史文森,蔡鹏,李广博.压制式干扰环境中GPS信号的载噪比估计算法[J].弹箭与制导学报,2014
[6]白燕.GNSS空间信号干扰评估及抑制方法研究[D].中国科学院研究生院(国家授时中心),2014.
[7]邹少军.GPS干扰机的设计与实现[D].武汉轻工大学,2015.
[8]焦逊,陈永光,沈阳.对GPS接收机实施压制干扰的效能评估研究[J].航天电子对抗,2003.
