一种面向SAR图像的多窗口道路边缘检测算法
2018-10-16沈夏炯张汇东韩道军
沈夏炯,张汇东,韩道军
1.河南大学 计算机与信息工程学院,河南 开封 475004
2.河南大学 数据与知识工程研究所,河南 开封 475004
1 引言
道路作为一种人造地物,是地理信息数据的重要组成部分,也是地理信息系统应用的基础数据[1-2]。SAR是一种高分辨率相干成像雷达,其利用天线向目标发射能量和接受目标返回的能量,并用数字设备记录所成图像。与传统的可见光、红外遥感相比,SAR具有全天候、全天时以及能穿透一些地物等成像特点[3]。
由于SAR具有以上特点,从SAR图像中提取道路网日益受到重视。近年来,国内外相关学者对SAR图像边缘检测做了大量相关研究。其中,常用于SAR图像边缘检测的算子有以下几种[4-7]:Bovik等提出的均值比检测算子(Ratio of Averages,ROA);以ROA算子为基础,Tupin等提出了乘性Duda算子和比率检测算子与交叉相关检测算子相融合的检测算子;Fjortoft等在其提出的多边缘模型之上提出了指数加权均值比率(Ratio of Exponentially Weighted Averages,ROEWA)检测算子。以上算子均具有恒虚警率,并在一定程度上克服了经典梯度边缘检测算子对乘性噪声敏感的缺点,取得了良好的检测效果。
常用的SAR图像边缘检测算子均是在单一窗口下进行的,但由于SAR图像在成像过程中受到严重的相干斑噪声及其他地物的干扰[8],单一窗口下的检测结果并不能同时满足高完整性与低误检率的实际需求。因此,在实际工程应用中需要对一幅SAR图像进行多种尺寸窗口检测并对检测结果进行融合,来提高边缘检测的完整性与对噪声的抑制效果。
在中低分辨率SAR图像中,道路主要表现为具有一定方向和长度的线特征,与其他邻近地物相比,道路成像的灰度值较低;在高分辨率SAR图像中,道路呈现出由亮的双边缘包围的暗长区域[9]。根据道路在SAR图像中所呈现出的低幅值、同质等特点,图像中灰度值越低、灰度值变化越平缓的局部区域为道路的可能性较大,反之则为道路的可能性较小。而基于统计学的图像局部熵具有良好的抗噪性,并能有效地评估出局部图像的灰度变化程度,也就能评估出该区域为道路的概率。
综上所述,本文介绍一种基于图像加权局部熵的SAR图像多窗口道路边缘检测算法。该算法利用现有的SAR图像边缘检测算子,对图像进行多窗口检测并对检测结果进行加权融合。每个点融合权值的确定问题,可以转化为评估像素点为道路点的概率问题。因此,本文使用加权局部熵作为评估道路点的依据,利用反余切函数的变换形式对其进行归一化处理来确定融合权值,这种融合权值能够反映出每个点所属区域的实际情况。然后利用权值对多窗口检测结果进行加权融合得到最终的检测结果,提高了道路边缘的完整性与对噪声的抑制效果。
2 熵与局部熵

图像的一维熵表示图像中灰度分布的聚集特征所包含的信息量[11],令 pi表示图像中灰度值为i的像素所占的比例,则定义灰度图像的一维灰度熵:

其中,minGray表示灰度图像中最小灰度值,maxGray表示最大灰度值。由公式(1)与公式(2)可以看出事物的不确定性越大,熵就越大,反映在图像上就是图像灰度值变化较大,也就是图像的离散性较大。
图像局部熵,顾名思义指的就是一幅图像中局部区域的熵值。能够用局部熵评估道路点概率的依据有以下两点[12]:(1)信息反应能力:根据熵的定义可知,图像局部熵的大小反应了该局部图像所包含信息量大小,局部熵越大,其像素灰度分布的无序程度就越高,图像灰度变化就越明显;局部熵越小,其像素灰度分布的有序程度就越高,图像灰度相对较均匀。(2)噪声不敏感:局部熵是图像局部窗口内所有像素点共同的贡献,对于单点噪声不敏感。局部熵的大小依赖于整个的局部区域,单个像素的灰度值对熵的影响很小。
3 SAR图像多窗口道路边缘检测算法
ROA算子虽能有效检测出SAR图像中的阶跃性边缘,但道路在SAR图像中呈现出线性特征,因此利用ROA算子来检测道路具有一定的局限性。ROEWA算子虽适用于检测SAR图像中线性边缘,但其在检测出道路的同时也会检测出非道路的高亮度线边缘,增加了误检率且无法正确确定边缘方向。乘性Duda算子是最早专门用于道路等线性特征检测的算子,其能够有效地区分出图像上的暗线边缘与亮线边缘,但其检测窗口的大小直接影响检测效果。由此可以看出,常用于SAR图的像边缘检测算子在检测道路边缘时均具有一定的局限性。
因此,本文提出一种利用图像道路点评估结果,来对乘性Duda算子多窗口检测结果进行加权融合的道路边缘检测算法。该算法首先对每个点进行道路点评估并进行归一化处理得到道路点概率,然后以每个点的道路点概率为依据计算不同大小窗口的权值,最后利用该权值对不同窗口下的检测结果进行融合处理。多窗口加权融合的道路边缘检测流程如图1所示。
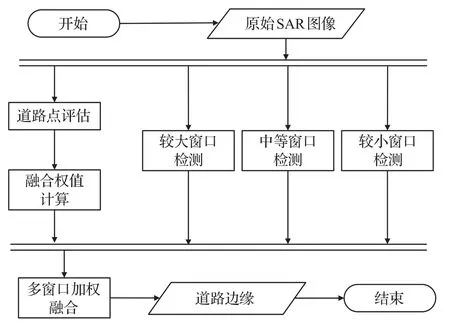
图1 多窗口加权融合的道路边缘检测流程
3.1 多窗口道路边缘检测策略
Geling等在Duda算子的基础上,结合SAR图像的统计特性,提出了乘性Duda算子。Duda算子将检测窗口分为3个区域region1、region2、region3,其中每个区域都包含N个独立的像素样本,如图2所示。

图2 Duda算子检测窗口
μ1、μ2、μ3分别表示3个区域的均值,则中心区域region1与其他两个区域 j的暗线边缘响应为:

进一步,可以得到当前像素的暗线检测算子相应为:

窗口的选择与图像中线的宽度紧密相关,线宽越大相应的检测窗口就应越大。但并没有相关论文对检测窗口与道路的宽度的对应关系进行具体的阐述。采用图3(a)作为原始图像,分别用不同大小的检测窗口对其进行检测,二值化幅值图如图3所示。
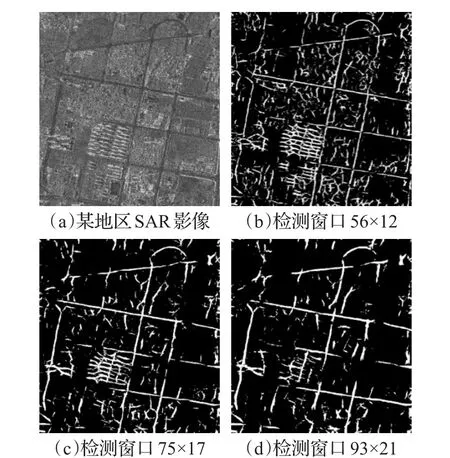
图3 不同大小窗口检测结果图
从图3可以看出,较小的检测窗口能够较好的保持边缘的细节,但由于乘性Duda算子是基于统计学的,较小的统计样本带来的是对噪声的抑制效果较差;较大的检测窗口虽能有效的抑制噪声对检测带来的影响,但其边缘保持度较差且边缘定位不准确。
在Duda算子的基础上,本文提出一种多窗口检测加权融合算法。该算法除了考虑较大、较小两种类型的检测窗口外,还引入了中等大小的窗口。中等窗口对噪声的抑制与道路边缘的保持虽处于中间水平,但不会为了抑制噪声过于破坏边缘细节,也不会为了保存边缘细节而导致过高的误检率。当某点的道路点评估结果处于中间值、不确定性较大时,如果该点实际为道路点在较大窗口中很可能被当作噪声过滤掉,如果该点实际为噪声等非道路点在较小窗口中很可能被当作道路点保留下来。此时,中等窗口这种折中的检测效果将具有较大的参考价值。在城区、乡村等不同类型的区域中,由于受到相干斑以及其他地物的干扰,这种不确定点均大量存在,因此在融合过程中引入中等窗口能够进一步规避较大、较小两种窗口的缺点与不足,提高融合效果。其融合计算如公式(5)所示:

其中,mags(x,y)、magm(x,y)与magl(x,y)分别表示每个点在小窗口、中等窗口与大窗口检测出的幅值;α、β、γ分别表示为3种不同尺寸的窗口检测结果的权值。
图像中的每一个点I(x,y)都以道路点评估算法的估算值为依据,如果I(x,y)落在道路上的概率p较大,则相应的增大α以获得较完整的边缘;概率 p较小说明当前点为噪声的可能性较大,则相应增大γ以获得较好的噪声抑制效果;如果概率p处于中间值说明不确定性较大,则相应提高β来保留边缘或抑制噪声。
3.2 道路点评估算法
如果每个点以恒定的权值对SAR图像进行多窗口加权融合,那么融合对噪声抑制与道路边缘保持的效果并不理想。根据道路在SAR图像中的成像特点,每个点的权值应根据该点所属区域实际情况动态的确定。本文提出一种道路点评估算法,来解决多窗口融合每个点融合权值的确定问题。根据图像局部熵的定义可知,其代表的是图像局部窗口内灰度变化的程度。局部窗口中灰度变化越大越复杂,其局部熵就越大;灰度变化越小越趋于一致,其局部熵就越小。因此该算法以图像的局部熵为依据,并利用SAR图像辐射性能指数对其进行加权来对道路点进行评估。
3.2.1加权形式
由道路在SAR成像中呈现的是一条同质的低幅值网状条带形区域。以当前像素点I(x,y)为中心的局部窗口内,若该窗口局部熵值shannonw越小,标准差stdw越小,其均值meanw越小,就表明该局部窗口内亮度较暗且灰度变化不明显,该点落在道路上的可能性就越大。因此,对道路点的评估问题就转换为图像局部区域内像素灰度值统计问题。
虽然图像局部熵可以反映图像局部的特征,但是通常的局部熵方法只考虑了窗口中像素灰度值出现的概率,而没有考虑窗口内的灰度起伏[13]。为了使得局部熵能够反映出局部图像窗口内灰度的起伏,本文利用SAR图像辐射性能指数[14-15]对图像中每个点的局部熵值进行加权。文中使用标准差、均值、等效视数、辐射分辨率等几种加权形式用来进行道路点评估,这几种加权形式都考虑到了局部窗口内的标准差与均值,具体形式如下所示。
(1)标准差
标准差反映了图像的丰富程度,即图像的均匀程度。以窗口内标准差为权值的加权局部熵定义为:

式中,stdw为局部窗口中灰度的标准差,shannonw为局部窗口中的熵值。
(2)均值
图像均值是整个图像的平均灰度,即反应了图像的实际测量值中所包含的目标平均后向散射特性。以窗口内标准差与均值乘积为权值的加权局部熵定义为:

式中,stdw、shannonw意义同上,meanw为局部窗口中灰度的均值。
(3)等效视数
等效视数度量了图像区分具有不同后向散射特性区域的能力,是衡量一幅SAR图像斑点噪声相对强度的一种指标。以窗口内等效视数为权值的加权局部熵定义为:

式中ENLw为局部窗口图像的等效视数,shannonw意义同上。
(4)辐射分辨率
辐射分辨率是衡量SAR系统灰度级分辨能力的一种量度,它定量的表示了SAR系统区分目标后向散射系数的能力。以窗口内辐射分辨率为权值的加权局部熵定义为:

式中,γw为局部窗口图像的辐射分辨率,shannonw意义同上。
3.2.2检测性能评价
在已知真实道路边缘位置的前提下,定义检测正确率Pr为加权局部熵值Hw大于阈值T并且落在真实道路边缘上的点,与真实道路边缘点数目的比值。定义误检率Pfa为加权局部熵值Hw大于阈值T且落在非真实道路边缘上的点,与所有非道路边缘点的比值。定义区别度D如公式(10)所示:

区别度D表示某种加权形式下的局部熵区别图像中道路点与非道路点的能力,值越大说明其区分能力越强。其表征的是正确率与误检率之间的倍率,倍率越大说明该加权形式区分道路点的能力越强。但区别度D不能保证道路边缘的完整性,因此正确率Pr与区别度D共同决定了某种加权形式的局部熵评估道路点能力。
本文采用某城区、乡村两幅具有代表性的SAR图像切片作为原始图像,分别采用不同的加权形式的局部熵对其进行检测。
检测窗口长度为7时,假设道路边缘信息占比为10%的情况下,城区原始SAR图像、局部熵检测结果图与各种加权形式下局部熵检测结果的二值化图像,如图4所示。

图4 城区加权局部熵检测结果图
城区SAR图像在局部熵与各种加权形式下检测结果的正确率Pr、误检率Pfa与区别度D如表1城区各种加权形式下性能指标所示。
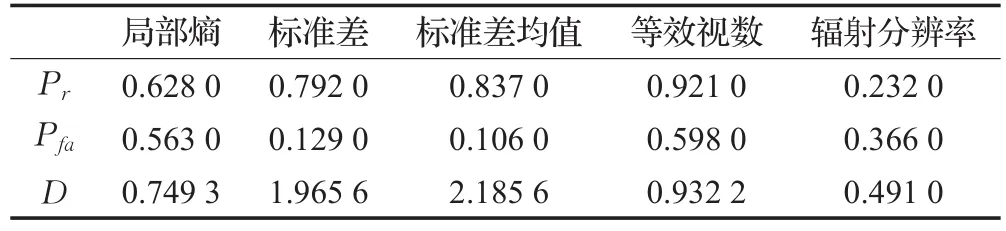
表1 城区各种加权形式下性能指标
检测窗口长度为11时,假设道路边缘信息占比为10%的情况下,乡村原始图像、局部熵检测结果图与各种加权形式下局部熵检测结果的二值化图像,如图5所示。
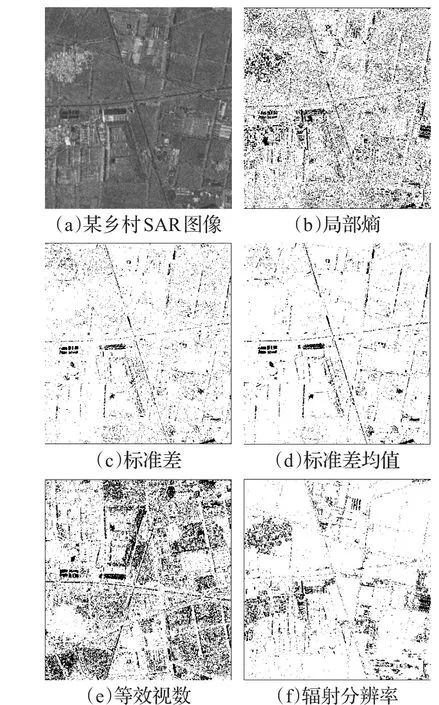
图5 乡村地区加权局部熵检测结果图
乡村SAR图像在局部熵与各种加权形式下检测结果的正确率Pr、误检率Pfa与区别度D如表2所示。

表2 乡村地区各种加权形式下性能指标
由以上2幅具有代表性的切片图的检测结果与相应的性能指标表可以看出,标准差、标准差均值、等效视数这3种加权形式在两幅不同场景的图像中都拥有较高的正确率。等效视数加权形式虽拥有较高的检测正确率,但同时也带来了大量的虚假信息。标准差加权形式虽能抑制一部分虚假信息,但道路点与非道路点的区别度仍不如标准差均值形式明显。标准差均值加权局部熵在能够较强的区分出道路点与非道路点的同时,且拥有较高的检测正确率。因此,本文以下均采用标准均值的加权形式对局部熵进行加权。
3.2.3 检测窗口大小
图像局部熵的检测窗口不能太大,要小于图像中道路的宽度,这样窗口才能落在道路的同质区域内;同时检测窗口也不能太小,过小的检测窗口导致较少的检测样本,对噪声的抑制较差。经验或实验结果表明,一般取检测窗口略小于或等于图像中道路的最小宽度。采用图5(a)所示的SAR图像作为原始图像,用不同大小的检测窗口对其进行检测,其二值化结果如图6所示。
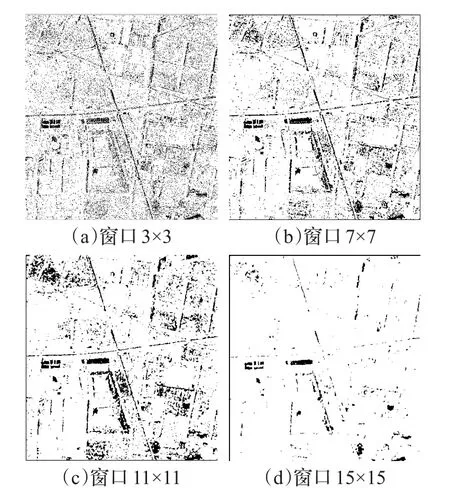
图6 不同大小检测窗口检测结果图
原始图像道路宽度为11个像素。由以上检测结果可以看出,随着检测窗口的增大,对噪声的抑制越来越理想。但当检测窗口大于图像中道路最大宽度时,加权局部熵已经无法正确判别道路点。
3.2.4 道路点分割阈值
道路边缘在一副图像中所占的比例不会太高,不同类型的区域可能会有差别。乡村地区的道路边缘一般少于城区,但差别不会太大,一般认为道路边缘占一幅图像的10%左右。可以根据该比率大致估算出最后加权局部熵的阈值T。采用图5(a)所示的SAR图像作为原始图像,用不同的比率估算阈值,其二值化结果如图7所示。
由以上检测结果可以看出,随着提高道路边缘在图像中的比率,并以该比率计算出的阈值T区分道路点与非道路点的效果在10%时最好。
3.3 多窗口融合权值

图7 不同百分比下的阈值化结果图
道路点评估算法的估算值不能直接用于确定各窗口的权值,还需进行归一化处理。根据加权局部熵的特点,如果当前点I(x,y)的局部熵值小于阈值T则该点在道路上的可能性较大;另一方面,如果I(x,y)的局部熵值大于T则该点在道路上的可能性较小,并且随着局部熵的增大可能性逐渐减小。因此本文对反余切函数进行变换,以对加权局部熵值进行归一化处理。变换后的反余切函数如公式(11)所示:

其中,Hw(i,j)为当前点I(x,y)的加权局部熵值,T为阈值。变换后的反余切函数曲线如图8所示。

图8 变换后反余切函数曲线图
由其曲线图可以看出,当I(x,y)的局部熵值小于T时,其落在道路上的可能性迅速增大;当I(x,y)的局部熵值大于T时,其可能性迅速减小。其归一化结果 p即可表示为I(x,y)落在道路上的概率。根据上文提出的多窗口加权融合模型,结合当前点落在道路上的概率p,本文提出一种多窗口融合权值的形式。其中较小窗口的权值α为:

中等窗口的权值β为:较大窗口的权值γ为:


β的系数取1.5时,可以使得道路点概率处于中间值不确定性较大时提高β,道路点概率较大或较小时迅速减小β,以来保留边缘或抑制噪声。这也符合上文提出的多窗口道路边缘检测策略,融合效果较为理想。
边缘检测算子计算出来的幅值自身并没有意义,通过像素点之间的对比才有了意义。因此,在融合权值的确定问题上不必局限于权值之和为1。本文提出的多窗口融合形式,能够提高道路点的幅值并能相应减少噪声等非道路点的幅值,扩大之间的区别度,取得了较好的融合效果。
4 实验结果分析
为了验证本文算法的有效性与适应性,选取了一幅城区SAR图像切片与一幅乡村地区SAR图像切片作为测试的SAR图像,如图9(a)、图10(a)所示。分别采用3种不同大小检测窗口的Duda算子对两幅图像进行检测,并对其检测结果进行加权融合。
两幅SAR图像中道路的宽度均为11个像素,3种不同大小检测窗口分别取56×12、75×17、93×21。加权融合方法分别采用固定权值与本文提出的算法两种形式。其中,固定权值形式下α、β、γ的取值固定为0.25、0.5、0.25;本文提出算法形式下局部上检测窗口大小为11,道路边缘占比取10%。
Duda算子阈值取0.6时,在不同尺寸检测窗口下的二值化幅值图、固定权值多窗口融合后二值化幅值图与本文提出的算法融合后二值化幅值图,如图9、图10所示。
采用Pratt品质因数[16]作为定量评价边缘检测性能的标准,其表达式如公式(15)所示:

其中,NDE表示检测到的边缘像素的数目,NID表示所有真实边缘像素的数目,di表示检测到的边缘像素点到离它最近的真实边缘像素点的距离,β为惩罚因子一般取值为1。品质因数 pratt的取值区间为[0,1],且pratt值越大说明检测效果越理想。城区、乡村地区SAR图像不同大小窗口与加权融合后检测结果的品质因数,如表3、表4所示。
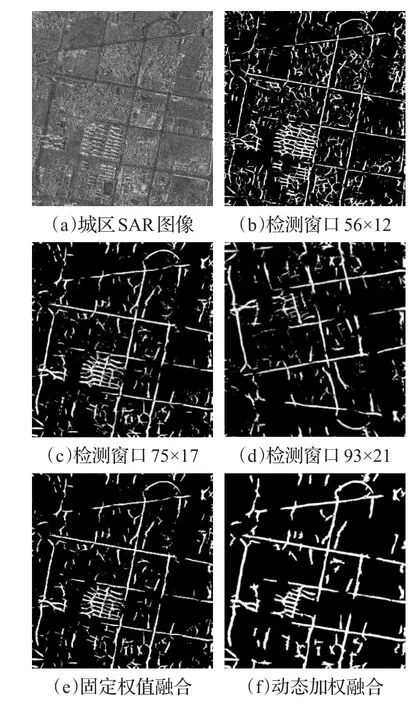
图9 某城区SAR图像道路边缘检测结果图
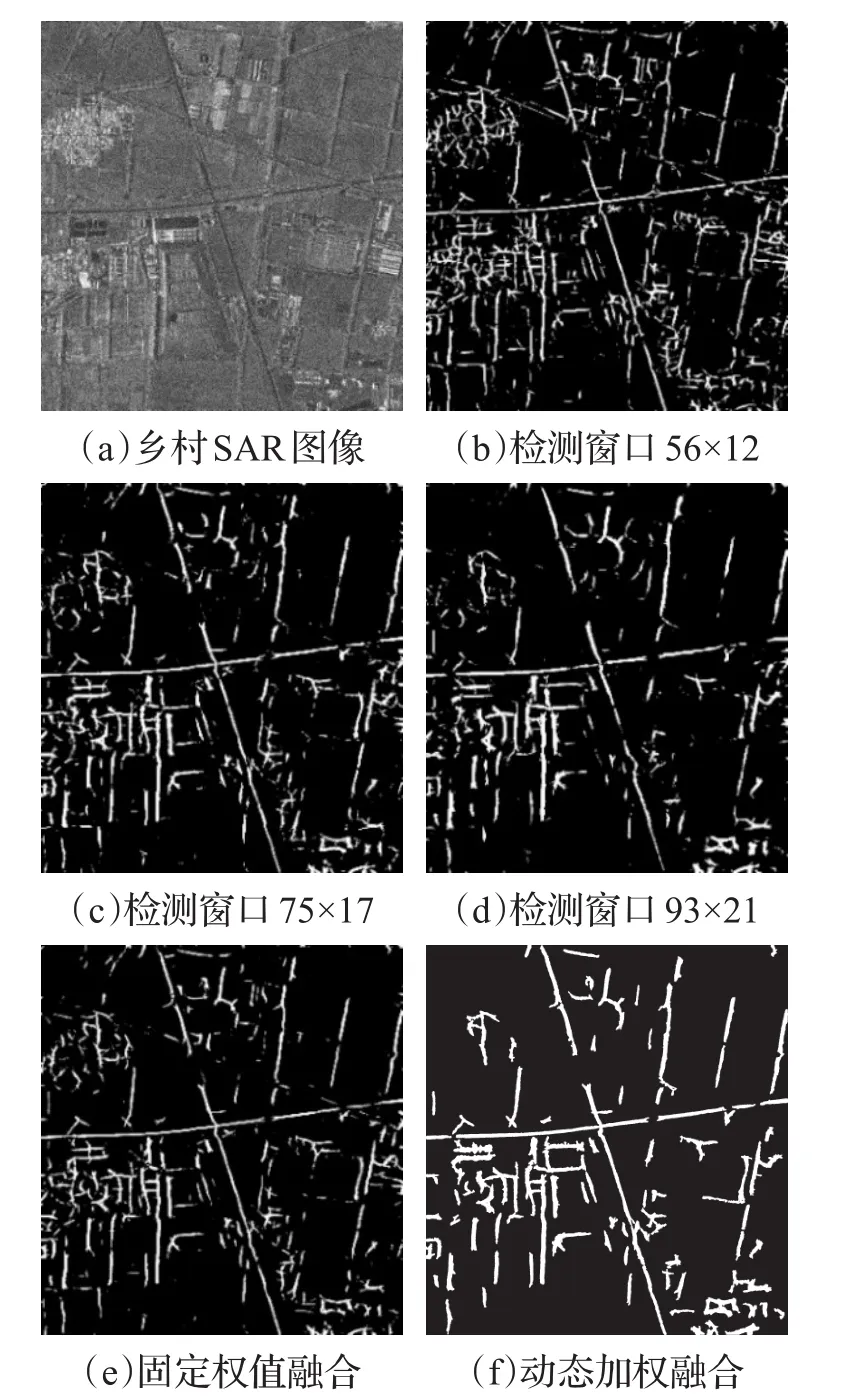
图10 某乡村地区SAR图像道路边缘检测结果图

表3 城区SAR图像品质因数数值表

表4 乡村地区SAR图像品质因数数值表
从图9、图10、表3、表4可以看出,小窗口虽能较好地保证边缘的完整性,但由于对噪声的抑制较差导致其品质因数不高。大窗口虽对噪声的抑制较好,但丢失的边缘信息较多导致品质因数更低。中等大小窗口虽对噪声抑制、边缘保持的效果一般,但其品质因数高于前两者。固定权值的融合检测结果较之前有所提高,但幅度较小。相比而言,基于加权局部熵的SAR图像多窗口道路边缘检测算法得出的结果明显优于前几种,说明该方法能够较好地去除噪声且较为完整的保存道路的边缘。但由于采用了3个窗口的检测结果并进行了道路点评估,该算法相较于常用的单窗口SAR边缘检测算子,每点需要多运行3次空间邻域运算。其中,由于窗口尺寸按倍数增加使得计算幅值时采样点数量也按相同倍数增加,导致大窗口的运算量是中等窗口的2倍,小窗口的4倍,而且并行的多窗口处理流程也增加了工程实现成本。
5 结束语
本文提出了一种基于加权局部熵的SAR图像多窗口道路边缘检测算法。为了能有效确定图像中每个点在不同大小窗口下的权值,本文以图像的局部熵为基础,提出了一种基于加权局部熵的道路点评估算法,以此来估计每个像素点为道路点的概率,并详细阐述了其检测窗口与阈值的取值问题。接着,本文利用道路点评估结果,结合经典的乘性Duda算子,提出一种多窗口融合的道路边缘检测算法。最后通过实验结果分析表明,融合后的检测结果明显好于单窗口与固定权值融合检测结果。下一步的研究工作重点将放在道路点评估算法的改进与多窗口检测流程优化上,进一步提高道路边缘提取的完整性与准确性并减少算法的运算量。