基于无线传感的动态智能交通诱导控制系统
2018-10-16李晓英
李晓英
(信阳师范学院 旅游学院, 河南 信阳 464000)
0 引言
由于经济飞速发展,城市道路中各种代步车也在爆发式地增长,解决交通拥堵问题已迫在眉睫[1,2].交通拥堵问题已是各个国家普遍关注的焦点之一.通过建立和使用网络交通系统来加强车流量的监控并实现交通信号的合理控制,从而增加了城市路口的通透量,极大地缓解了交通拥堵的问题.例如,美国设计的ADVANCE(Advanced Driver and Vehicle Advisory Navigation Concept)系统[3,4],主要依靠路面的检测器来获取交通数据流的信息.美国最具代表性的车载导航系统Trav Tek主要是对车辆即将行驶的路径进行实时引导,并将信息服务系统实用化,系统的主要组成部分有需要检测的车辆、信息处理中心以及交通管理中心.日本的实时路径诱导系统DRGS(Dynamic Route Guidance System)打破传统的分布式诱导方法,采用了集中式诱导方法,车辆通过安装的VICS(Video Investigation Combat System)视频侦查系统的车载导航装置,使车辆在任一时刻任一地点都能实时获取前方的真实路况,通过该系统能给出车辆当前最优的行驶路线.交通诱导控制系统是在车流量监控系统的基础上设计出来的,它同交通信号灯控制系统以及交通诱导系统构成了整个智能交通系统.通过车载无线传感器网络来获取城市的实时交通数据,并通过对其数据的分析以及信号灯的控制相协调,从而能给出车辆的最优路径规划,成功诱导车辆运行,达到缓解交通负载的目的.
1 系统设计
1.1 无线传感网络的体系结构
无线传感网络部分是由车载无线节点和道路上的感应装置构成,用来采集车流量信息.如图1所示,无线传感网络主要由三部分构成,分别为数据获取部分、数据发布部分以及网络控制管理中心部分.这种网络是由一个个节点组成的,网络中的节点是由传感器、各个通信模块、网络处理单元构成的,每个分节点由固定的网络通信协议形成节点自身的分布式网络,采集来的信息经优化后再传递给信息控制系统.由于其具有自组织性、动态拓扑和节点数众多以及分布密集等特点,使得它有很强的独立性和容错性[5].
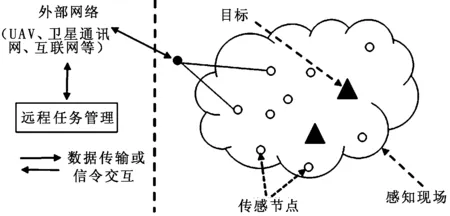
图1 无线传感网络体系结构Fig. 1 The architecture of wireless sensor network
1.2 无线传感网络的定位算法
在车流量监测系统中,对车量的精确定位非常关键,而传统的定位算法大都采用质心定位算法[6].对于图2空间,图中五点的坐标分别是A(xa,ya,za)、B(xb,yb,zb)、C(xc,yc,zc)、D(xd,yd,zd)、E(xe,ye,ze).
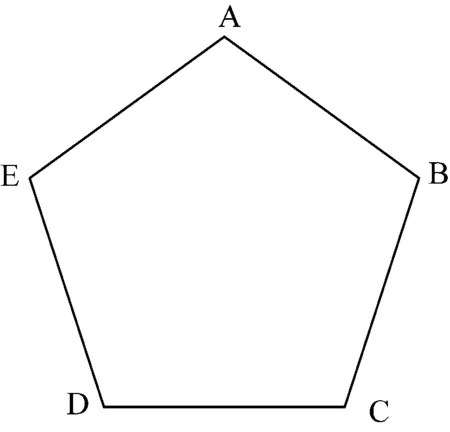
图2 凸多边形Fig. 2 The convex polygon
凸多边形ABCDE的质心O(x,y,z)是由传统的质心算法计算得到,即:
x=(x1+x2+x3+x4+x5)/5,
(1)
y=(y1+y2+y3+y4+y5)/5,
(2)
z=(z1+z2+z3+z4+z5)/5.
(3)
由于在车流量无线诱导中是通过对定义区域内的点进行平行定位,所以z坐标无须参与计算,进一步简化可得:
(4)
因传统的质心算法所获得的定位精度较低,故参考了RSS(received signal strength)算法的思想,其路径耗损模型算法表示为:
(5)

定义Rji为信号强度比值,即:
Rji=Sj/Si,i=1,2,…,N;j=1,2,…,N;i≠j.
(6)
定义权值为:
(7)
加权后的数学表达式为:
(8)
通过计算权值及借鉴RSS思想对质心定位算法进行赋权后得到最终表达式:
(9)
其中:(xi,yi)代表接收到的各锚节点位置信息,Ni为锚节点在时间段内的转发次数.
具体定位算法的步骤为:
步骤1 在道路十字路口以及道路途中设置部分节点,其中包括锚节点和未知节点,锚节点能够周期性地广播自身节点的序列号和自身位置;
步骤2 未知节点记录广播中收到的RSS值,并将其放在一起比较;
步骤3 其余锚节点接收并修正其余锚节点广播传来的RSS信息;
步骤4 锚节点通过对传来的信息进行自赋权值,修改信息后继续将更新后的数据周期性的广播至其余节点;
步骤5 未知节点判断接收到的RSS信息是否达到阈值,若未达到,则返回继续执行步骤2;
步骤6 若未知节点已达到阈值,停止接收信息并比较锚节点的权值大小;
步骤7 未知节点是由该节点周围锚节点相互组合而计算出来的,通过计算出来的交点坐标以实现对交点定位;
步骤8 先由传统的质心算法计算出未知节点的估计位置,同时把这种未知节点作为下一个锚节点广播自身节点信息;
步骤9 判断是否还有可以定位的点,如果有,则返回步骤5,否则转步骤10;
步骤10 当整个检测范围中所有节点全部实现定位则算法结束,最后计算出各节点的真实位置信息值.
1.3 智能交通诱导系统的路网模型
在已经得知车流量信息的基础上进行交通诱导时,若要使整个诱导过程所用时间最短,效率最高,就要使各诱导任务在时间与距离上相互协调.AOE网是用边表示活动的网,以此为基础,把路网抽象为节点,弧线并结合路径权值,便可把路网模型抽象为带权图.带路径权重的多交叉路口路网模型如图3所示.
图3中:N={Ni,i=1,2,…,9}为交叉口集合;G=(N,A,C)表示整个交通路网的状态空间图,且相邻两交叉路口间的路段边权值存储在A={Ai,i=1,2,…,11}内;两交叉路口Np与Nq的路段用C(Np,Nq)表示,C表示完成从路口Np到Nq所付出的代价.

图3 带路径权重的多交叉路口路网图论模型Fig. 3 The road network model with path weight
采用M存储所有被优化目标的变量信息,被优化的变量个数则有M的维数所表示,任一个被优化的变量均映射着一个单因素优化目标[7].多个优化变量的共同影响呈现给系统的就是路段的权重.多目标优化函数U是由三个优化子目标组成,它们分别为指定路段当前排队总的车辆长度PA,t、车流量的阻塞密度KA和路段通行能力MA.整个多目标优化函数表达式为:
(10)
PA,t=VA×XA,t/LA×rA,
(11)
KA=1000×N/LV+L0,
(12)
(13)
式中:VA表示在A路段上的车辆自由流密度值;XA,t表示A路段在t时间点的道路承载容量;LA表示A路段的真实长度值;rA表示A路段到下一个交叉路口信号灯为红灯的间隔长度;T表示信号灯的时间周期;N表示道路为单向机动车道数;LV表示在道路为阻塞状态下两车辆的平均间距;L0表示车辆的平均长度值;tg是道路十字交叉口一个周期内的信号灯时间长度值;t0为路口信号灯为绿灯亮时所有等待车辆中第一辆车通过停车线所用的时间长度值;ti为车辆直行且向右转向通过停车线所有的平均时长;φ表示折扣系数,通常取常数值0.9.
多目标路径诱导问题的数学模型是由四元组〈G,Nstart,Ngoal,U〉表示出来,且初始节点设为Ngoal∈N.根据算法进行搜索便能够找出从Nstart到Ngoal的最优路径[8].
2 基于无线传感的动态智能交通诱导控制过程
基于无线传感的动态智能交通诱导控制具体过程为:
步骤1 控制系统所有参数初始化设置,主要包括影响车流量监控系统的所有传感器参数、车辆定位系数等参数.
步骤2 采集信息,通过车载无线传感器网络采集各路口实时的数据、各路段的静态、动态交通信息等.
步骤3 优化采集来的数据并传给信息控制中心.
步骤4 信息处理中心通过对信息的整理并反馈给交通信号控制系统.
步骤5 信号灯控制系统通过收集的路面信息进行信号灯的控制,并返回步骤2,实现区域控制中心与交通监控中心的双向协调.
步骤6 将数据库中收集到的车流量信息经过数据处理生成诱导信息,并发布给车载终端、交通网络以及电视广播等.
步骤7 机动车辆通过GPS实现自定位及目标定位,便于查询目标和自身位置,并通过查询到的交通信息进行实时诱导,形成新的交通流,并返回步骤1.
3 实例验证
以某市一中小县城为实例,对该系统进行实例应用分析.通过实例验证车载无线传感器网络采集各路口实时数据、各路段的静态、动态交通信息的能力,并将该数据反馈给信息处理中心,完成信号的调控与车辆的诱导.通过诱导前后的数据进一步分析出智能交通诱导系统缓解交通负载的能力.该市共划分为23个小区,其中某道路的平面图如图4所示.

图4 实验路网编号Fig. 4 The experimental network number
从该路网统计可知,此路网有4个交叉口、7条双向路段、主干道为双向6车道、次干道为双向4车道,城内限速为40 km/h.在各道路的交叉口、拐角口及道路中间安装无线传感装置进行来往车辆的定位,其中车流量的实时监控周期为3 min.通过无线传感定位算法实时获得的采集数据信息参见表1.
车流量监控不仅能够检测到当前数据流信息,而且通过车流量的检测能获得过去若干时间的车流量信息,并且能够预测下一个时间段各个交通路线的数据信息.通过表1比较可知:1、5、7道路实时车辆超出了规定的标准参数,说明该时刻道路处于超负荷状态.
信号控制系统对收集到的交通流数据信息通过数据处理模块中的数据分析功能对所控制的红绿灯进行参数设置,如表2所示.由于AC为主干道,车流量相对较大,BD为次干道,所以信号时长周期分别为80 s、70 s.周期时长中包括左转等待时长与直行等待时长.表1为四个交叉路口收集到的实时数据,根据每个路口方向车流量的大小自动调控.车流量大的等待时间相对于车流量相对较小的时间短一些,这样能够尽可能地提高各路段的车辆通过率,从而减少车辆拥堵造成的交通负载严重化.

表1 交通信息表Tab. 1 The traffic information sheet
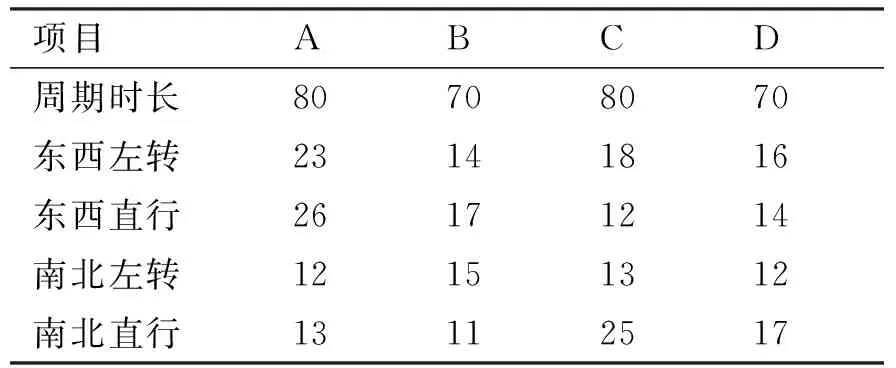
表2 交叉口信号控制方案Tab. 2 The intersection signal control scheme
通过车流量监控系统实时更新分享的数据,使得诱导系统能够实时对道路和交通的自动诱导.由表1可知当前1、5、7道路出现拥堵,交通负载严重.为提高车辆通行效率,利用诱导系统便可实时查询目标和自身的位置,通过驾驶员提供的所要到达的目的地规划出行的最优路径,减少因盲目行走而加重交通拥堵的现象.
经过诱导后得到新的交通数据流信息如表3所示.对比表1可知,车辆进行智能诱导后,表1中1、5、7道路负载严重的现象在诱导后得到了缓解,能够将实时运行车辆控制在道路车载容量之内,并且每条路径的平均行程时间与行程速度都有了相对应的提高.
诱导前、后得到的路网最新数据对比信息如表4所示.从表4对比数据可知,诱导后的车辆平均出行时间减少了18%,车辆平均速度提高了15%,平均延误时间减少了38%,从而避免了车辆排队过久,因盲目行车而加重交通负载的现象,诱导系统在一定程度上降低了交通网络的复杂度.同时,实时调控交通路口的信号灯信息,大大缩短了通行车辆排队等待时间,从而提高了交通车辆吞吐量和车辆的平均行驶速度.

表3 诱导后的车流量数据Tab. 3 The data of induced traffic flow

表4 诱导前后的路网数据对比表Tab. 4 The comparison of road network data before and after induction
4 结论
采用RSS算法对传统的质心定位算法进行改进,改进后的算法直接对定位算法进行优化处理,从而提高了整个算法的优化效率,且定位更加精确,并给出了改进后的具体定位计算的方法步骤;将AOE网运用到诱导路网模型中,能直观地展现交通路网,根据算法进行搜索能够找到最优路径并进行诱导;信号的实时调控对于高峰期的车流量诱导路径也起到了很大的作用.采用无线传感的动态智能交通诱导控制系统,能够降低通行车辆平均出行时间,从而提高了整个车辆平均通行速度,也降低了平均延误时间,使得交通运行效率得到了提高,城市交通负载得到很好的平衡,整体改善了城市交通性能.
