移动式四自由度直角坐标机器人的结构设计与仿真*
2018-10-16文怀兴岳瑞芳
□文怀兴 □岳瑞芳
陕西科技大学机电工程学院 西安 710021
工业机器人指应用于工业领域的多关节和多自由度机器人。我国工业机器人产业起步较晚,但发展迅速。随着工业4.0及中国制造2025的提出,我国制造业将迎来巨大的发展机遇。在未来几十年的发展中,工业机器人在制造业的生产过程中将会占据越来越大的比重,在制造业领域的地位将会变得更加重要。笔者通过对比目前工业生产中主要应用的关节机器人和三自由度直角坐标机器人,对移动式四自由度直角坐标机器人进行了结构设计与仿真。
1 结构设计
1.1 整机结构
目前,在我国工业生产中应用范围比较广的有关节机器人和直角坐标机器人,其中直角坐标机器人主要包括龙门式和壁挂式。关节机器人自由度高,可移动范围广,但结构复杂,工作负载较小。直角坐标机器人结构简单,工作负载大,但体积大,工作范围小。综合分析以上两种机器人的优缺点,笔者设计了移动式四自由度直角坐标机器人,机器人整机结构如图1所示。
安装于丝杠螺母副上的X轴步进电机带动X轴同步带轮,驱动X轴同步带,实现X轴方向的左右运动。同步带轮与齿轮齿条相比柔性好,对机械加工要求低。Y轴步进电机带动Y轴同步带轮,驱动Y轴同步带,最终驱动脚轮在轨道上滚动,实现Y轴方向的前后运动。
选用T型丝杠螺母副,由Z轴步进电机带动丝杠,绕Z轴作旋转运动,从而驱动螺母及固定在其上的整个手臂作Z轴方向的上下运动。

图1 机器人整机结构
C轴回转运动,固定于底板上的C轴步进电机带动回转驱动装置运动,进而使机器人的整个上部作C轴回转运动。
1.2 C轴回转运动副结构
由于X轴、Y轴、Z轴的传动方案保持了三自由度直角坐标机器人的结构,笔者不再详细介绍。下面主要介绍C轴回转副,也就是机器人腰部回转副结构方案的选择及比较。
腰部回转副是机器人最关键的运动副之一,支撑着整个机器人的上部运动,因此必须要能承受较大的扭矩及倾覆力矩。根据设计要求及相关资料,参照市场上成熟的产品,常见的腰部回转副结构如图2所示。
方案1通过电机驱动谐波减速器,再将谐波减速器的输出轴连接到腰部的主轴。
方案2通过电机驱动一对外啮合齿轮减速器,再将减速器输出轴连接至腰部主轴。
方案3通过电机驱动一对蜗轮蜗杆减速器,再将减速器输出轴连接至腰部主轴。
方案4通过电机驱动回转驱动装置,直接连接机器人上部。
在前三个设计方案中,方案1结构最为简单,安装拆卸也极为方便,但由于电机和腰部主轴直接相连,承载能力较差,特别是对机器人工作时上部的动载荷平衡要求较高,同时,使用的谐波减速器价格昂贵。
方案2在使用谐波减速器的基础上增加了外啮合齿轮减速器,增大了减速比,但同时增大了整个腰部关节的体积和复杂度,增加了成本。
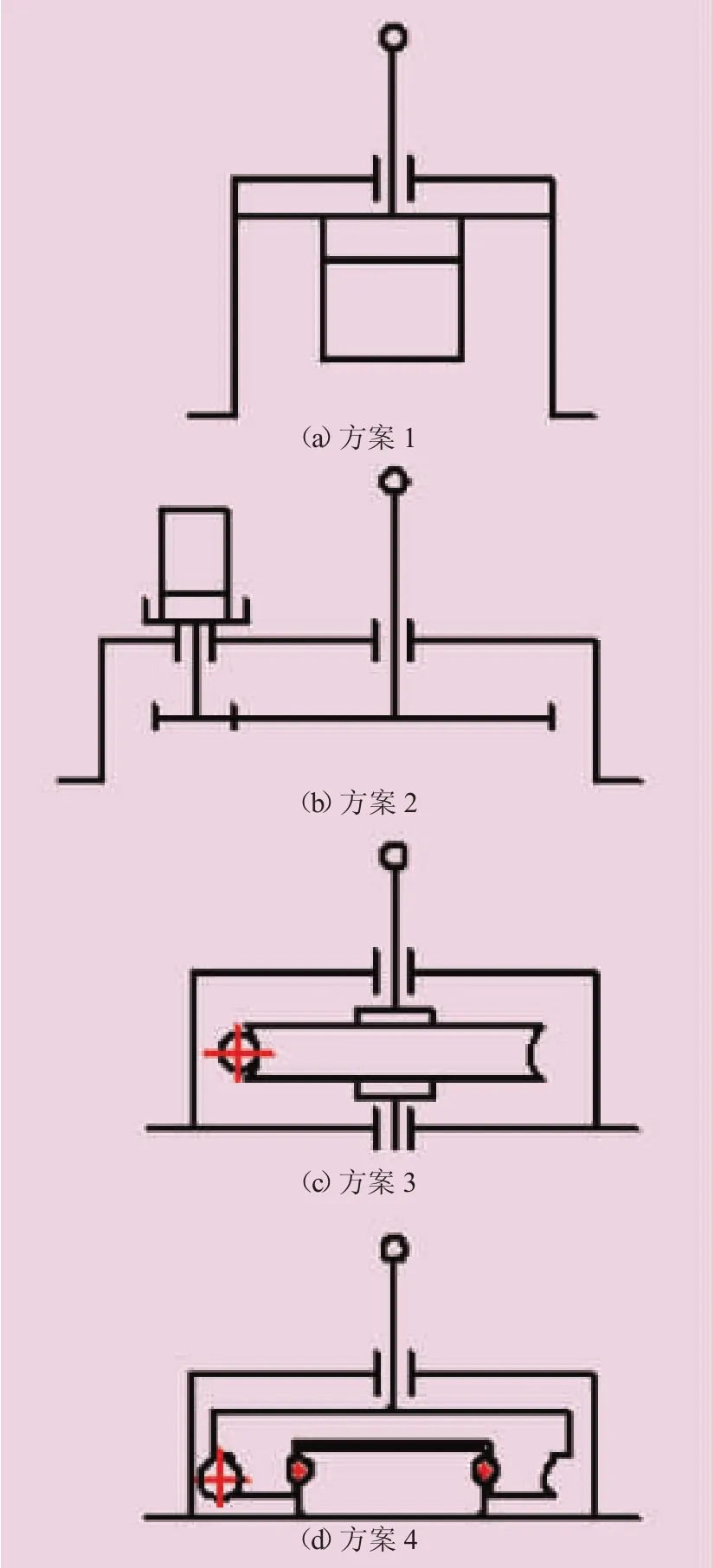
图2 常见腰部回转副结构
方案3使用了蜗轮蜗杆减速器。由于蜗轮蜗杆本身结构比较紧凑,减速比大,因此方案3的体积和结构复杂程度介于方案1和方案2之间[1]。同时,蜗轮蜗杆传动具有较高的承载能力,并且具有自锁性,价格较低。可见,在前三个方案之间比较,方案3是比较理想的。
方案4使用了回转驱动,其核心部件采用回转支承,在蜗轮蜗杆的基础上集成了蜗轮蜗杆安装时需要的支撑轴承、安装架等构件,结构更加紧凑,同时能承受较大的轴向力、径向力和倾转力矩。
对比分析四个方案,最终确定方案4作为C轴回转运动副的具体结构。
2 结构建模
完成移动式四自由度直角坐标机器人的虚拟样机设计,需要先选择合理的计算机辅助设计软件对其结构进行三维建模。笔者在综合分析对比了各建模软件后,选择Unigraphics软件完成机器人的结构建模。Unigraphics是一个交互式的计算机辅助设计制造软件,功能强大,可以方便实现各种复杂实体的建模[2],主要模块包括零件造型、曲面造型、钣金设计、数据转换、高级渲染、图形输出、特征识别等。笔者先进行零件的建模,再完成整机的装配。整机的建模过程如图3所示。

图3 机器人整机建模过程
机器人腰部回转关节的传动部件是回转驱动装置,其传动实质是蜗轮蜗杆传动,且该蜗杆是环面蜗杆。环面蜗杆传动具有良好的传动性能和承载能力,在重载、高传动比行业中得到了广泛应用,但由于加工难度大,滚刀的精确磨削技术和传动强度计算尚未完全解决,限制了其推广和应用[3]。当今,数控技术的发展比较成熟,提高环面蜗杆加工精度的关键是建立精确的三维模型。因此,以回转驱动装置中的关键零件环面蜗杆为例,阐述使用Unigraphics软件建立精确三维模型的方法,其它零部件不再做详细介绍。
2.1 环面蜗杆基本参数
回转驱动装置中SE7B型环面蜗杆的结构参数如图4所示。图4中的ni为回转支撑上的螺纹半径,na为顶板上的螺纹半径。
2.2 环面蜗杆螺旋线参数方程
环面蜗杆的螺旋线可以看作是一个运动点C,绕Z轴作匀速运动,同时沿Z轴匀速移动另一个点M。点M也绕Z轴以与点C相同的角速度移动[4]。点C的运动简图如图5所示。

图4 环面蜗杆结构参数
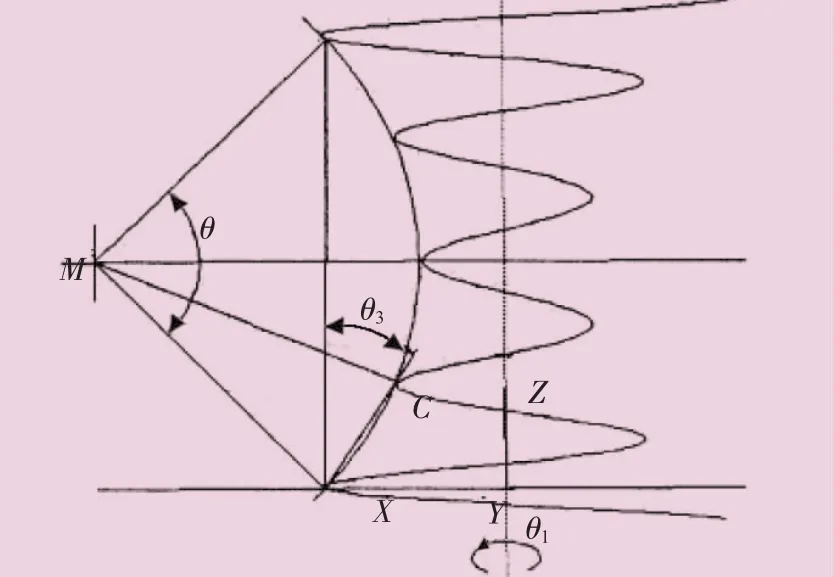
图5 点C运动简图
根据运动关系,可列出点C的参数方程为:
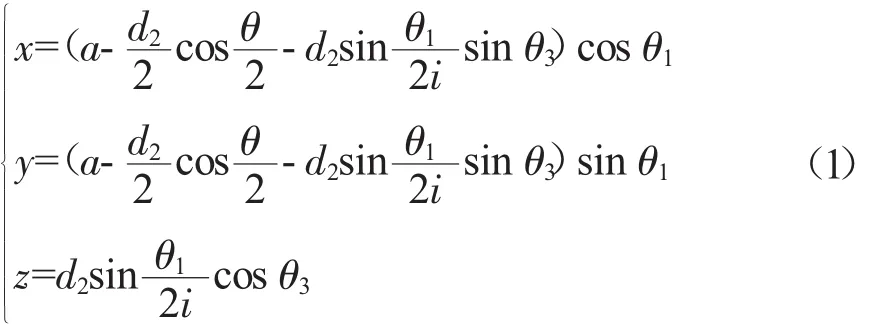
式中:a为环面蜗杆与蜗轮的中心距,a=(d1+d2)/2,d1为蜗轮直径;d2为蜗杆直径;θ为环面蜗杆包络蜗轮的工作角,θ=360(z'+1)/z2,z'为蜗杆包围蜗轮的齿数,z'=z2/10;z2为蜗轮齿数,z2=z1i,z1为环面蜗杆的头数;i为蜗轮蜗杆传动比;θ1为蜗杆匀速圆周运动的角变量;θ3为点C位移矢量与Z轴的夹角。
2.3 生成环面蜗杆螺旋线
基于上文得到的环面蜗杆螺旋线方程,在Unigraphics软件中输入环面蜗杆齿根圆的螺旋线方程[5],得到齿根圆螺旋线,如图6所示。
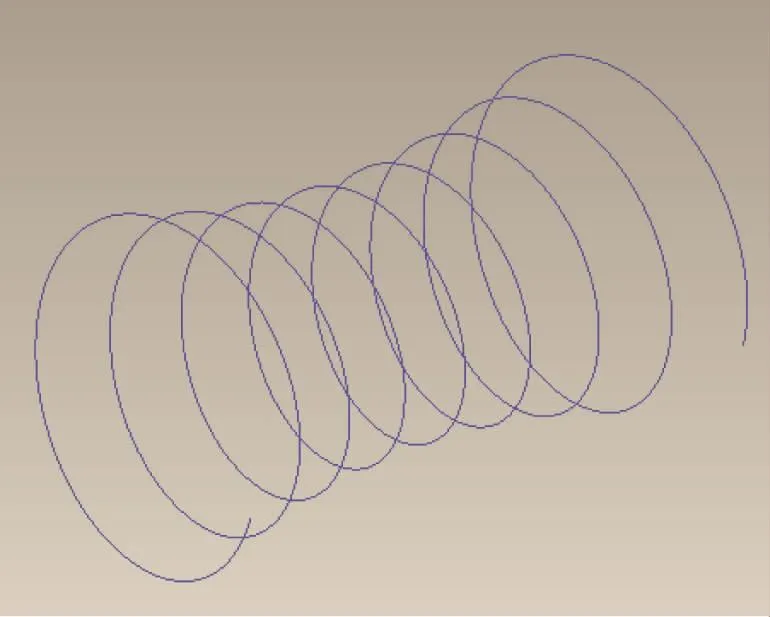
图6 齿根圆螺旋线
通过相同方式,在Unigraphics软件输入另外一根齿根圆和两根齿顶圆的螺旋线方程,得到另外三条齿面螺旋线,如图7所示。

图7 齿面螺旋线
2.4 生成环面蜗杆实体
在Unigraphics软件建模中,经常使用的方法是由点形成线,再由线生成面,最后由面生成体。在已经建立的环面蜗杆四条螺旋线的基础上建立点,由点建立齿槽横截面的轮廓线,如图8所示。形成齿槽面后,通过旋转方式生成环面蜗杆轮齿部分实体,再通过实体化的方式生成环面蜗杆轮齿,如图9所示。

图8 齿槽横截面轮廓线

图9 环面蜗杆轮齿
生成环面蜗杆轮齿之后,再进行必要的修饰,如圆角、倒角等,最后加上蜗杆的其它部分,得到环面蜗杆的实体模型[6],如图10所示。

图10 环面蜗杆实体模型
3 仿真
Unigraphics软件为用户提供了多种仿真分析工具,包括静态分析、流体分析、公差分析和数控加工等。用户可以在不需要现场测试的情况下,测试计算机结构设计的合理性,从而有助于降低成本和缩短时间[7]。
移动式四自由度直角坐标机器人的整个运动过程分为整机沿X轴方向平移、整机绕Z轴旋转、机械臂沿Z轴向下运动、手爪抓取物体、机械臂上移五种运动。在Unigraphics软件中进行运动仿真,首先设置连杆,将模型中能够满足运动需要的部件连接在一起[8],如图11所示。其次,创建运动副,将各个连杆连接起来,完成指定运动,如图12所示。再次,通过Step函数设置各个环节的运动时间、顺序及路径,将各个运动步骤连接起来[9],如图13所示。最后,为机械手的关键部件设置干涉,防止出现穿透或碰撞[10],如图14所示。运动仿真界面如图15所示。
4 结束语
在现有的三自由度机器人基础上,笔者设计了移动式四自由度直角坐标机器人的结构,并在Unigraphics软件中完成了机器人结构的实体建模,对结构和运动的可行性进行了仿真,确认了设计的合理性。

图11 连杆设置界面

图12 运动副创建界面
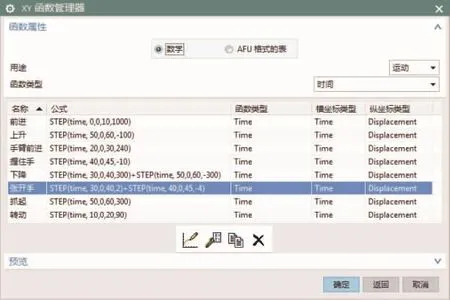
图13 Step函数设置界面

图14 干涉设置界面

图15 运动仿真界面