一种小型全自动植树机设计
2018-10-16殷劲松倪文彬
殷劲松,倪文彬
(南京理工大学泰州科技学院,江苏泰州225300)
我国荒漠化面积占国土总面积的27.32%,植树造林、种草恢复植被是防治荒漠化的最有效手段。因此,要想解决我国土地荒漠化问题,提高森林覆盖率,改善生态环境,必须大力开展机械化和智能化植树造林,提高植树造林效率[1-4]。据统计,我国森林覆盖率为12.95%,远低于世界平均水平(31.3%)。近年来我国实施了植树造林、防风治沙、退耕还林等一系列政策。不论从我国国情还是从国家的有关政策而言,全自动植树机都具有很大的市场潜力。本研究将一种全自动小型植树机与无线控制技术相融合进行探讨。
1 总体设计
该小型全自动植树机可分为机械部分和控制部分。机械部分主要由储树盒、支架、挖穴装置、填土装置、各驱动电机组成。控制部分可分为硬件和软件部分。硬件部分由核心电路板、直流电机驱动模块、无线数据传输模块组成,软件部分分为上位机程序和下位机程序。上位机程序负责自动搜索并选择使用串口进行连接,当点击功能按键时程序通过串口对外发送相应指令。下位机程序负责解析收到的指令并执行对应的子程序,向指定端口发送PWM信号和普通数字信号,控制电机驱动各部件完成目标动作。功能模块划分如图1所示。
2 机械结构设计[5-8]
小型全自动植树机的核心机械部分由储树盒、支架、挖穴装置、填土装置、电机组成,底盘以下装有4个车轮,其中储树盒、支架、挖穴装置和填土装置主要由亚克力板经激光切割制成,底板为保证足够的强度并尽量减少底部车轮电机的负荷,采用不锈钢板经激光切割制成。该植树机的三维造型及实物如图2所示。

2.1 储树盒及支架的设计
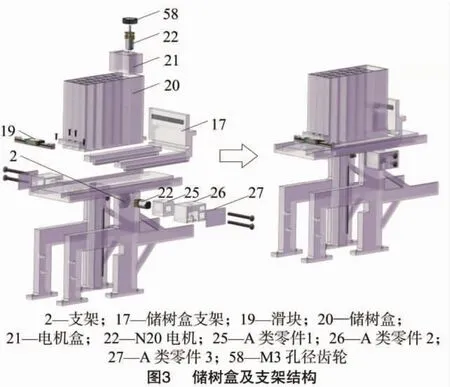
由于该植树机体积较小,而储树盒框格的尺寸必须足够大,为提高储树盒树苗的容纳量,将其设计为多行多列且能沿x轴、y轴双向移动的形式。在考虑其他零部件的尺寸后,将储树盒设计为5行3列的形式,储树盒及支架结构如图3所示。在储树盒(20)下部的前后端各有1个凸台,后端的凸台深入储树盒支架(17)后背板下部的凹槽中。在储树盒支架(17)的前端固定一滑轨,其上的滑块(19)通过螺钉与储树盒(20)前端的凸台连接固定。在储树盒(20)后部的大框格中设有电机盒(21),N20电机(22)竖直放置其中,电机输出轴上的齿轮(58)与储树盒支架(17)后背板上部的齿条啮合,因此储树盒(20)可在储树盒支架(17)上左右移动。储树盒支架(17)的底部固定着齿条。在支架(2)顶部平台的左右两侧各有一长槽,其正下方设有用于容纳齿轮的凹槽,储树盒支架(17)底部的齿条与齿轮穿过长槽啮合。支架(2)两侧均有电机盒,其中水平放置有N20电机(22),输出轴齿轮于凹槽内带动齿条使储树盒(20)前后移动。在支架(2)的后部设有一平台,用于放置主控板和电机驱动板。
2.2 挖穴装置的设计
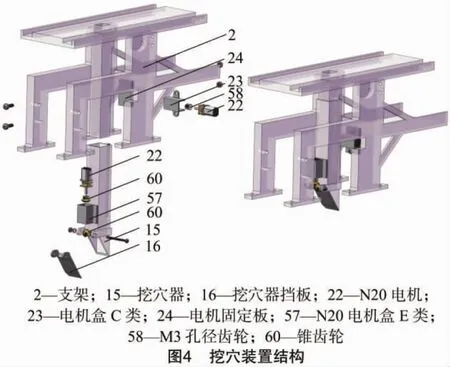
挖穴装置结构见图4:在支架(2)的内侧有1个N20电机(22)与齿轮(58)连接,水平放置。挖穴器(15)套在落苗通道外围,其后部齿条与齿轮(58)啮合。该电机工作时,挖穴器(15)可上下移动。挖穴器(15)的前部有1个N20电机(22)竖直固定,通过1对锥齿轮(60)带动挖穴器挡板(16)旋转。
2.3 填土装置的设计
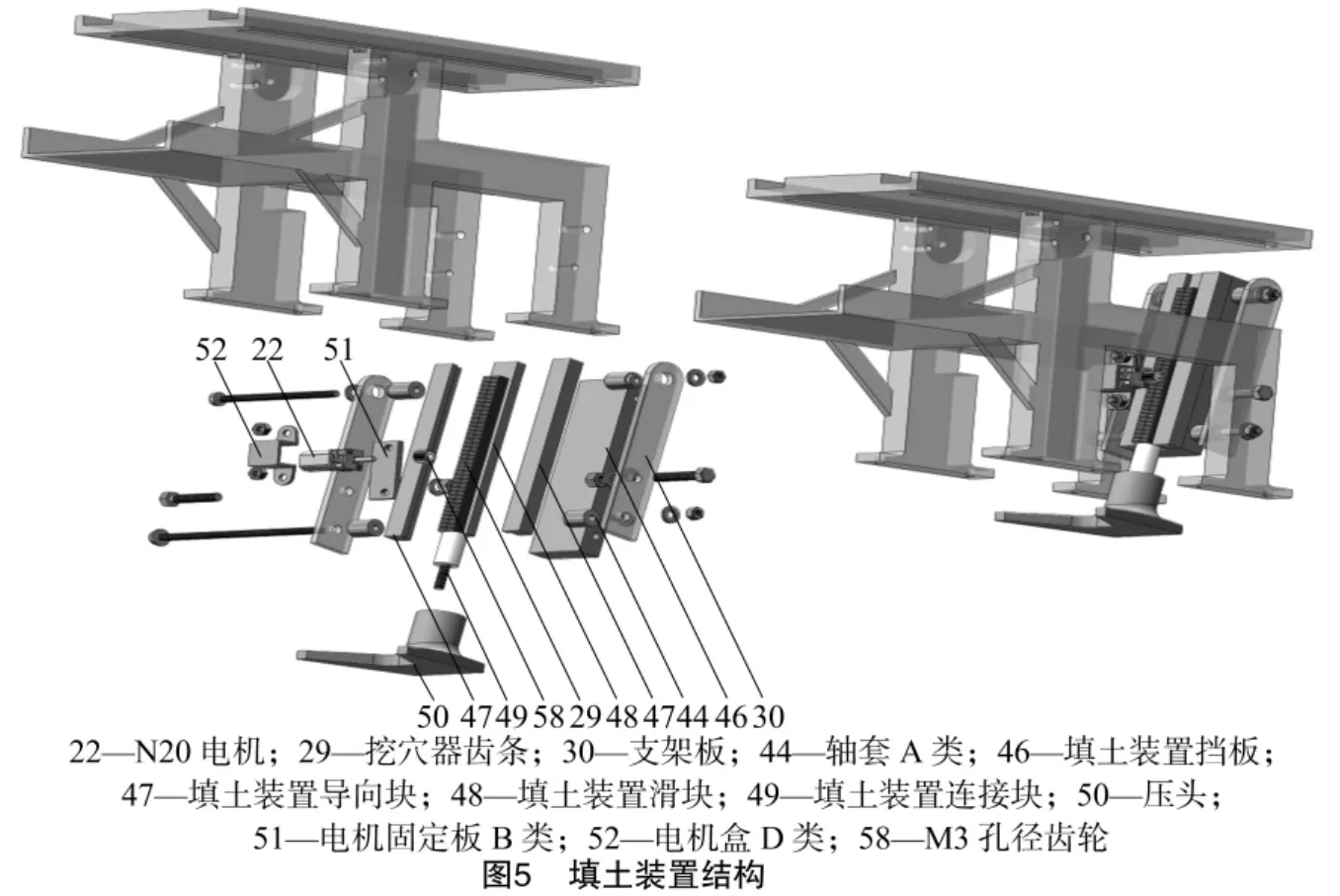
填土装置如图5所示,在支架(2)前腿内侧有1个N20电机(22)水平放置,输出轴朝内与齿轮(58)相连接。填土装置滑块(48)上设有挖穴器齿条(29),底部的填土装置连接块(49)与填土压头(50)连接。填土压头(50)底部为板状牛角结构,牛角朝向挖穴机构一侧。当N20电机(22)工作时,填土装置滑块(48)在槽内斜向往复运动,填土压头(50)反复拍打地面将树苗周围三方向的泥土压实。
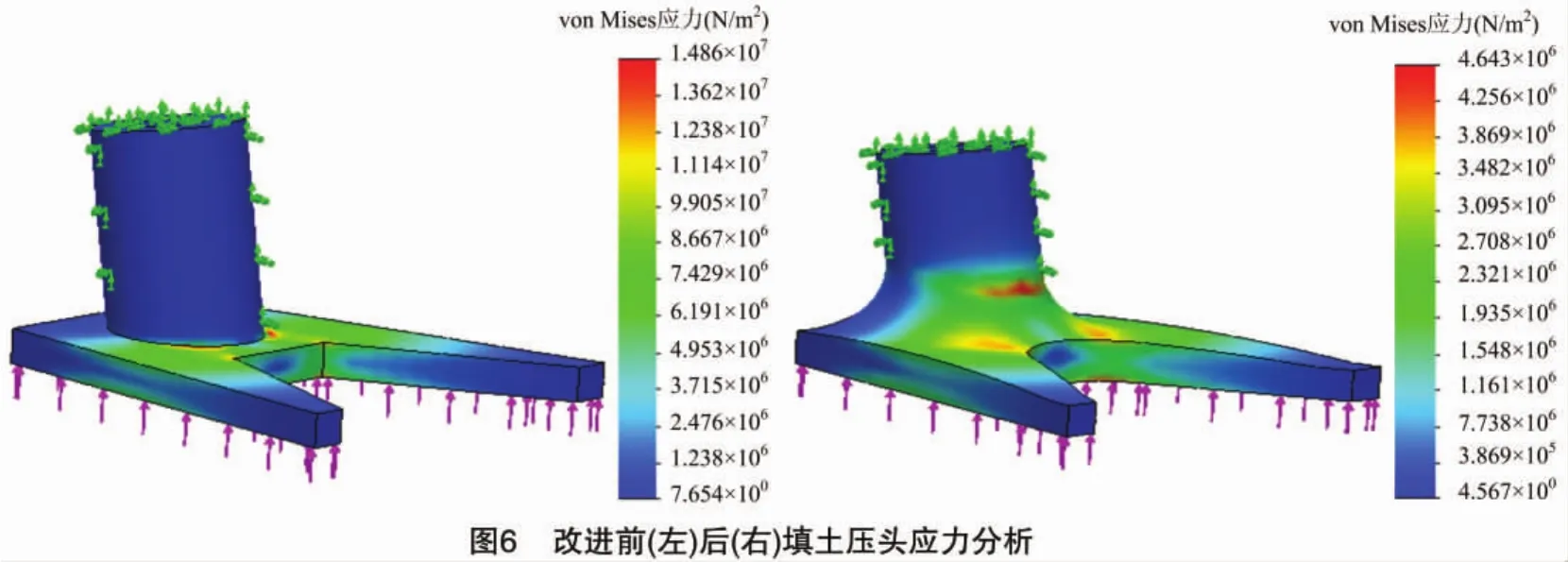
使用SolidWorks Simulation模拟填土压头在实际使用时的受力情况,通过多次改进使填土压头所受最大应力减少约68.8%。改进前后填土压头应力分析如图6所示。
3 控制电路的设计[9-14]
3.1 核心电路板
本设计采用基于ATmega 2560微控制器的Arduino Mega 2560作为主控板,它使用16 MHz主频晶振,拥有16个模拟输入端口,最大的特点就是具有多达54路数字输入输出端口,其中14个可作为PWM输出口,特别适合需要大量I/O接口的设计。
3.2 直流电机驱动模块
3.2.1 Motor driver- HR8833 双路直流电机驱动模块Motor driver-HR8833双路直流电机驱动模块的工作电压为3.3 ~10.0 V,逻辑电压为3.3 ~5.0 V,支持 PWM 调速,最大单路持续工作电流为1.5 A,可驱动双路电机。该电机驱动模块最大的特点是体型小巧,使用方便,在安装时不会占用过多空间。由于N20电机最大堵转电流只有0.3 A,因此在本设计中使用2个该模块用于驱动4个N20电机。HR8833双路直流电机驱动模块原理如图7所示。

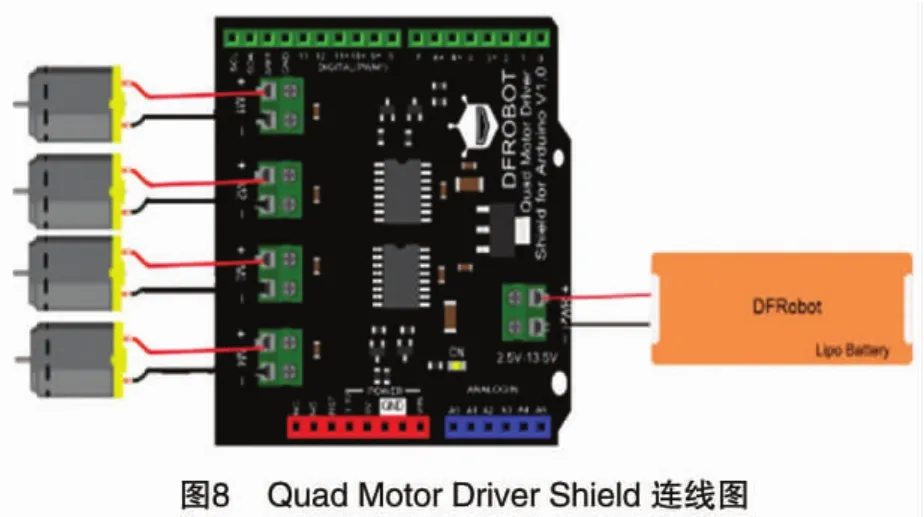
3.2.2 Quad Motor Driver Shield for Arduino 四路直流电机驱动扩展板 本设计选用的25GA370直流减速电机在达到电机功率点时电流为1.1 A,但堵转电流为3.2 A,因此选择了峰值电流达3.2 A的Quad Motor Driver Shield for Arduino四路直流电机驱动扩展板进行驱动(图8)。
3.3 无线数据传输模块
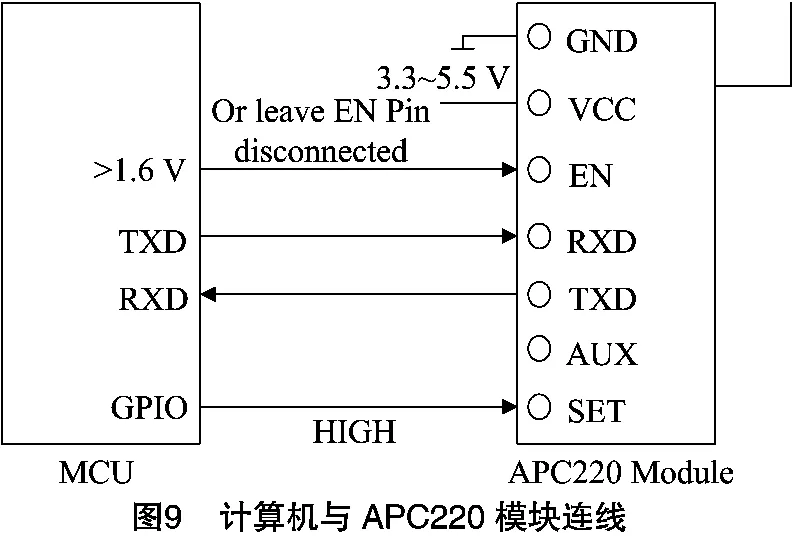
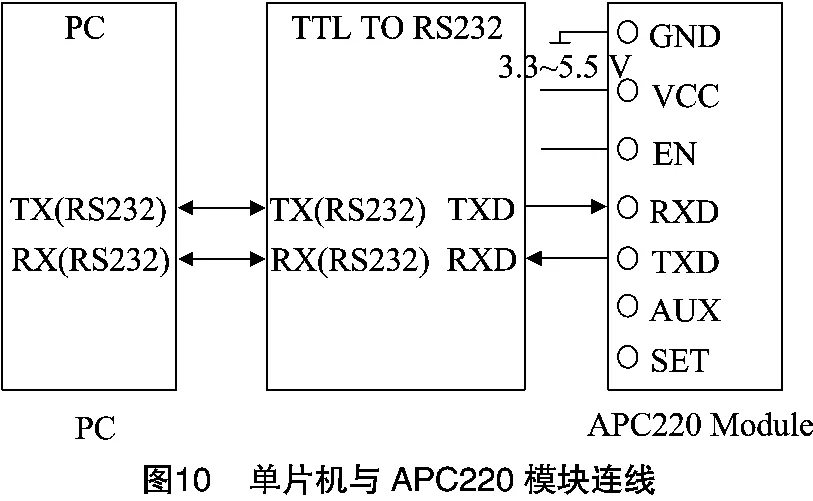
APC220无线数传模块是一款高度集成的半双工微功率无线数据传输模块,采用了循环交织检错编码,最大可以纠正24 bits连续突发错误。APC220模块使用GFSK调制方式,提供了UART和TTL电平串行接口,同时提供多个频道以供选择。它的传输距离较远,在开阔地可达1 000 m,完全满足小型自动树苗移栽机的实际使用需求。在使用APC220无线数传模块时,需要先将1对APC220分别与USB/TTL转换器连接,插入计算机的USB口进行参数配置,完成之后其中一个模块仍与计算机连接,而另一个与主控板连接。图9和图10分别是APC220与计算机和单片机的连线图。
4 软件的设计
4.1 上位机程序设计
该上位机控制程序使用Winform技术开发。Winform基于.Net开发平台,用于开发窗体和可视控件,创建基于Windows系统的应用程序。图11为C#上位机界面。

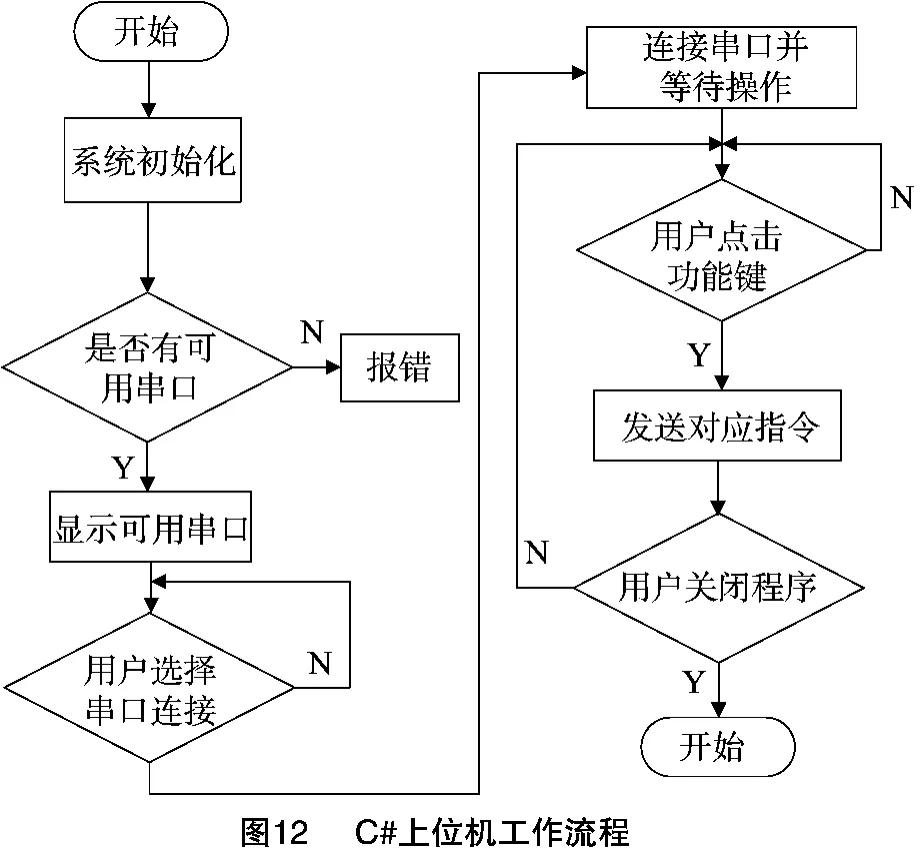
想要进行串口通讯,首先要获取可用的串口信息,通过列表方式让用户进行选择并连接。以下程序代码通过try语句完成获取工作,如果发生错误,catch语句执行,通过对话框提醒用户“找不到通讯口”。图12为C#上位机工作流程图。
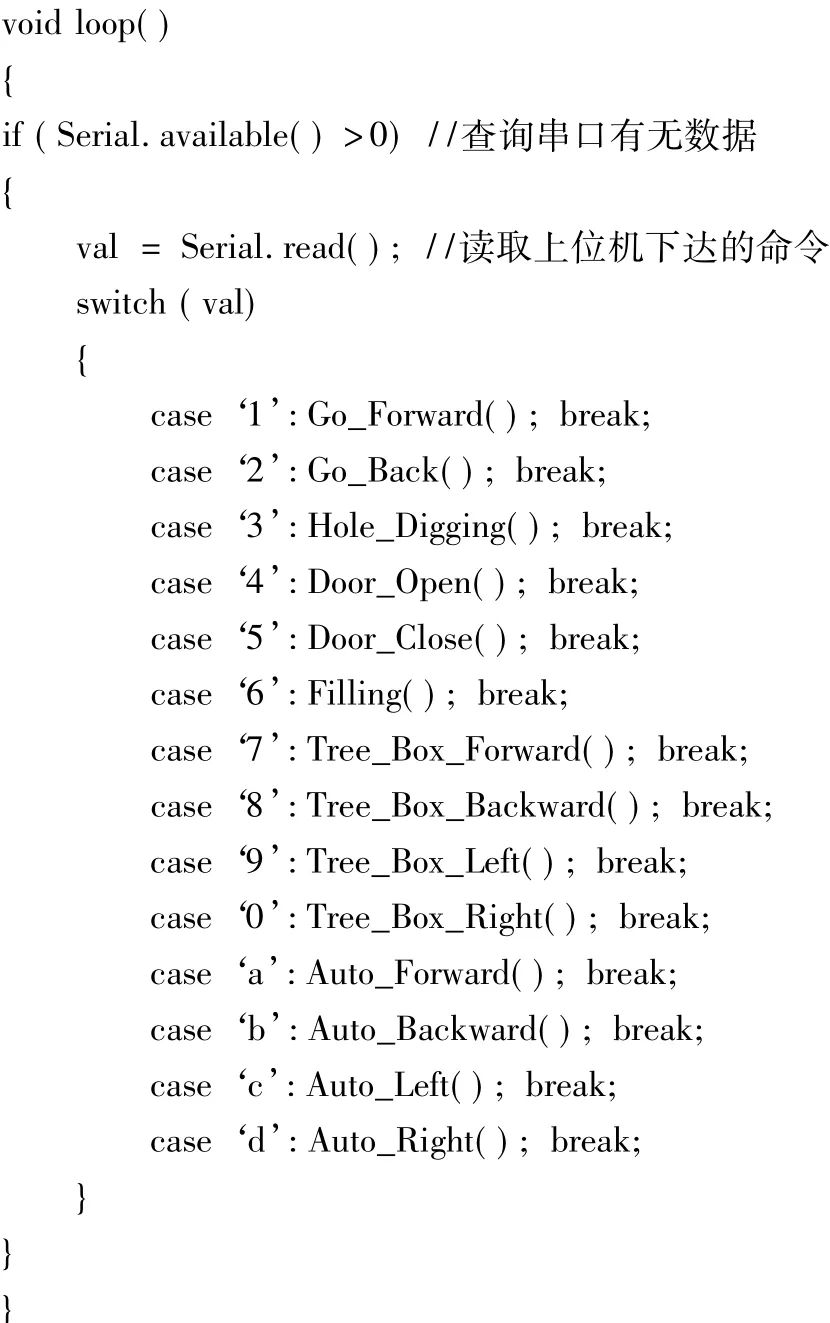
4.2 下位机程序设计
loop循环,即Arduino下位机程序中的主程序,首先检测串口是否接受到数据,若有,则读取并保存,再加以分析,根据不同的指令执行对应的子程序,从而实现用户通过上位机按需选择不同的功能执行。
5 结语
该小型全自动植树机综合运用机械结构、电机驱动、单片机原理、上位机程序等多方面的知识和技术,使用开源平台开发以便于后续的升级,同时机器具有通过安卓、iOS平台控制的可能性,特殊的结构设计有利于为种植业自动化发展提供新的思路。
