移动地面站宽温度跟瞄系统信标接收镜头
2018-10-15李小明张家齐白杨杨孟立新张立中
李 响,柳 鸣,王 超,李小明,张家齐,白杨杨,孟立新,张立中
(长春理工大学 空间光电技术国家地方联合工程研究中心,吉林 长春 130022)
1 引 言
随着空间光学的不断发展,光学遥感器的分辨率越来越高,星地下行通信链路的速率需求也逐渐提高到Gbps量级,接近射频通信速率的理论极限,因此空间无线激光通信技术已经成为了当前空间光学研究的热点之一。星地激光通信地面激光接收系统是开展星地激光通信链路不可或缺的重要组成部分,并常采用移动式地面站的方式来满足激光通信星地链路高可通率的要求。由于野外环境较为复杂,在环境温度发生改变时会使光学系统产生离焦,最终导致光电跟瞄系统跟踪精度的降低,影响整个激光通信链路。在移动地面站的研制过程中,迫切需要一种可在较宽温度范围内工作的跟踪镜头,为移动地面站光电跟瞄系统的研制提供先期技术基础。
目前广泛使用的温度补偿方式有3种,分别是机械被动式、光学被动式以及机电主动式[1]。机械被动式温度补偿技术[2-3]利用特定温度性能的机械材料以热胀冷缩的原理来移动元件,使元件的位移与温度效应互相补偿以实现无热化设计。该方式只能调整较小的位移,由于材料种类有限,一般并不能完全达到补偿的预期效果。光学被动式温度补偿技术[4-9]是利用光学材料本身温度特性的差异以及光学特性,选择不同光学和温度特性的材料进行匹配,使系统的光学性能和热性能满足要求,缺点是某种特性的光学材料可能并不存在,使光学被动式方法产生了局限性。机电主动式温度补偿技术[10]通过驱动光学元件产生位移实现温度补偿,移动范围大、原理比较简单,实际应用中更容易实现。
针对移动地面站光电跟瞄系统的自身特点,设计了一种用于较宽工作温度范围的信标接收镜头,采用机电主动温度补偿方式消除了野外复杂温度环境对于光学系统产生的不利影响,保证了光电跟瞄系统所接收信标光的成像质量,通过有限元分析软件ANSYS、光学设计软件CODE V进行了仿真,验证了该系统的可行性和有效性。
2 原 理
2.1 光学系统设计
根据移动地面站跟瞄系统的指标要求,信标接收光学系统的通光口径为150 mm,视场(跟踪视场)为5 mrad,选用分辨率1 024×1 024,像元尺寸5 μm×5 μm的相机,单个像元的角分辨率可达到5 μrad,通过以下公式可以计算出光学系统的焦距:
(1)
式中,f为光学系统焦距;p为像元大小;n为像元数量;ω为信标接收光学系统视场角。
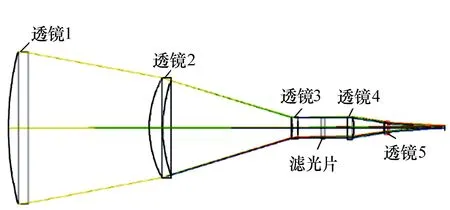
图1 光学设计图 Fig.1 Diagram of optical design
通过公式(1)可以计算出光学系统的焦距为1 024 mm,光学设计如图1所示,光学系统点列图如图2(a)所示,最大光斑尺寸为5.18 μm,能够满足光斑尺寸小于5×5个像元(25 μm×25 μm)的指标要求。光学系统的MTF曲线如图2(b)所示,接近衍射极限像质能够满足要求。

图2 光学系统点列图以及MTF曲线 Fig.2 Spot diagram and MTF curve of optical system
2.2 温度补偿方案
移动地面站主要在野外进行工作,工作环境相对恶劣,要求系统的工作温度在-20~40 ℃范围内。由于系统中多种材料的热学性能存在差异,导致镜片的折射率、曲率半径、厚度以及间隔都会发生改变(见公式(2)~(5)),令光学系统产生离焦。
nrel(λ,T)=nrel(λ0,T0)+
(2)
R′=R+R·α0·dT,
(3)
D′=D+D·α0·dT,
(4)
L′=L+L·α0·dT,
(5)
其中:T0为参考温度,通常为20 ℃;T为实际温度;λ为信标光波长;nrel(λ,T0)为参考温度下光学材料的相对折射率;dnrel(λ,T)/dT为材料的相对折射率温度系数;R为参考温度下透镜曲率半径;R'为实际温度下透镜曲率半径;D为参考温度下透镜中心厚度;D'为实际温度下透镜中心厚度;L为参考温度下支撑元件长度;L'为实际温度下支撑元件长度;α0为材料的热膨胀系数;dT为温度变化量。
根据本系统的特点,选择机电主动式温度补偿方式消除温度对于光学系统性能的影响。由于相机体积较大,高精度位置调整较难实现,因此采用移动镜组的方法对温度进行补偿,如图3所示。如图1所示,透镜1、透镜2尺寸较大不适合作为运动镜组。若移动透镜3进行温度补偿,由于透镜2到透镜3段光路明显收窄导致轴向透镜间隔公差较严,运动机构的执行精度会对补偿效果产生直接影响;而透镜5前后都为非平行光路,移动会令光学系统产生额外像差。因此透镜4作为移动镜或透镜4、透镜5作为移动镜组较为合适。
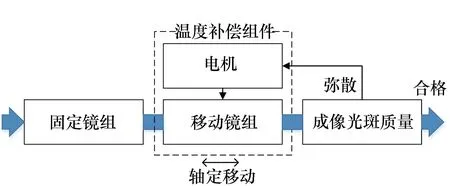
图3 机电主动式温度补偿方式原理框图 Fig.3 Block diagram of electromechanical active temperature compensation method
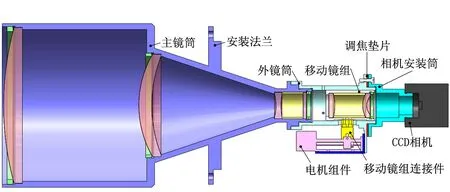
图4 信标接收系统结构图 Fig.4 Structure of beacon receiver system
2.3 光机结构方案
根据温度补偿方案,对系统的光机结构进行了设计,具体结构如图4所示。
信标接收系统主要由三部分组成,分别为固定镜组、补偿镜组、以及成像组件。固定镜组主要由主镜筒、透镜1~3以及滤光片组成。如图4所示,其中主镜筒为本系统的主要承力元件,通过安装法兰与移动地面站光电跟瞄转台连接。采用45号钢作为主镜筒的材料,其线膨胀系数与光学玻璃相差不大(如表1所示),刚度较高,能够满足移动地面站复杂工作环境的力学要求。

表1 材料参数表Tab.1 Table of material parameter
ΔL=Δt(αs-αo)L,
(6)
其中:△L为温度变化引起的不同材料间的尺寸变化差异;△t为温度变化量;αs为结构元件材料线膨胀系数;αo为光学元件材料线膨胀系数;L为元件尺寸。
主镜筒中最大透镜直径为150 mm,极限工作温度与基础温度最大温差为40 ℃,因此通过公式(6)可以计算出主镜筒与透镜之间预留的最大间隙应为0.03 mm(计算值为0.024 mm,留余量取值0.03 mm),能够保证光学镜片在-20~40 ℃温度范围内的安全使用。
补偿镜组包括外镜筒、移动镜组、电机组件以及移动镜组连接件等。如图4所示,外镜筒通过螺纹与固定镜组中的主镜筒连接。移动镜组包含两片透镜(在下文进行分析),通过步进电机驱动能够在外镜筒内进行高精度轴向移动,补偿由于温度变化导致的成像光斑弥散。补偿镜组采用铝合金(2A12)作为材料,重量轻,经济性较好。移动镜组中透镜直径仅为25 mm,根据公式(6)可以计算出镜筒与透镜需留有0.02 mm间隙(计算值0.016 mm,留余量取0.02 mm)以满足系统使用要求。
3 仿真分析
使用ANSYS有限元分析软件对系统结构进行了有限元建模,如图5所示,有限元模型共有232 695个节点、131 967个单元。

图5 有限元模型 Fig.5 Finite element model
对系统进行了模态分析,结果如图6所示,一阶模态为370 Hz,动态刚度较好,能够满足移动地面站在野外复杂环境下工作的需求。
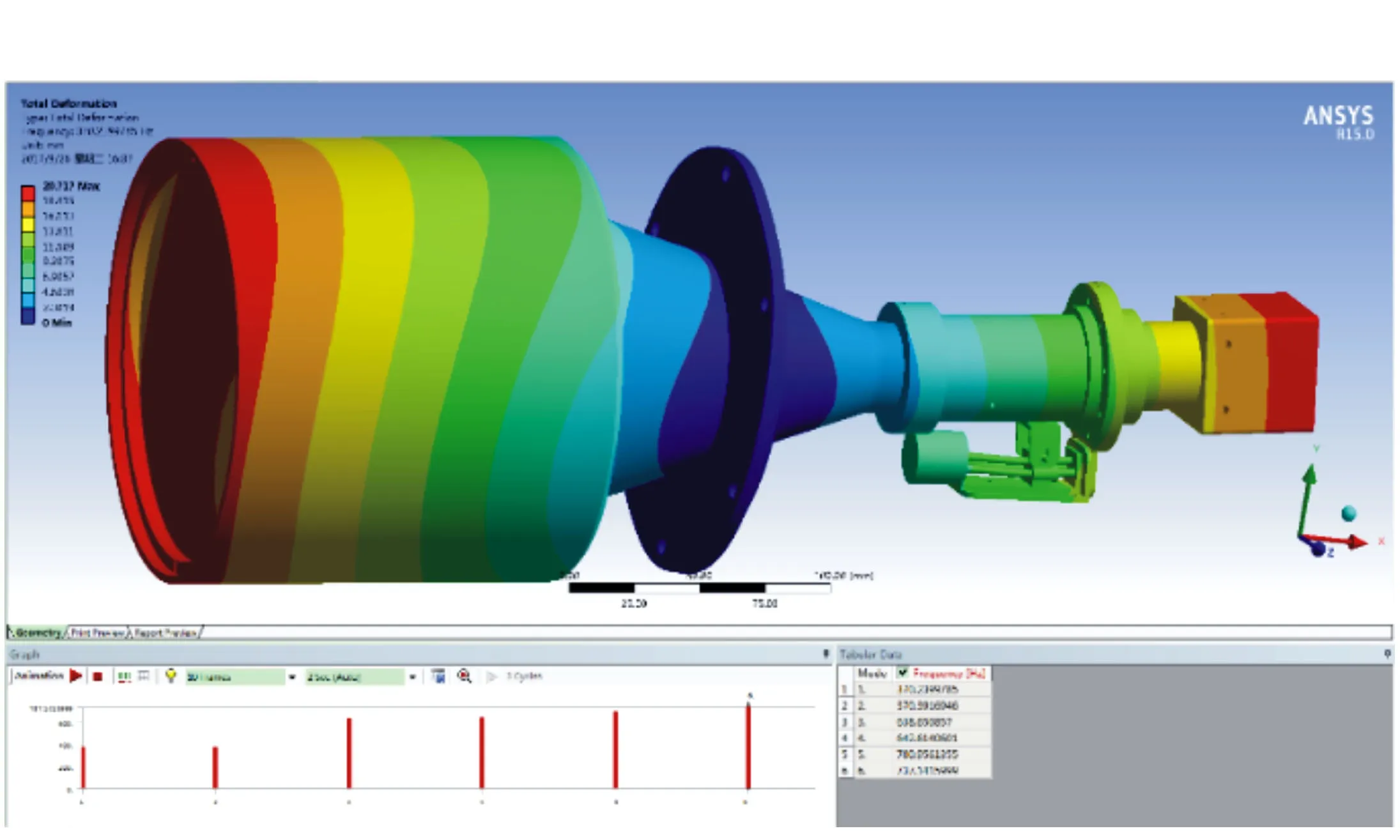
图6 模态分析结果 Fig.6 Results of model analysis
当环境温度降低至-20 ℃时,对信标接收系统进行了有限元分析,系统轴向变形量云图如图7(a)所示,透镜间隔变化量如表2所示。透镜1与透镜2间距减小了0.068 4 mm,透镜2与透镜3间距减小了0.065 8 mm,透镜3与透镜4间距减小了0.042 3 mm,透镜4与透镜5间距减小了0.033 0 mm。当环境温度升高至40 ℃时,系统轴向变形量云图如图7(b)所示,各镜片间隔变化量如表2所示,透镜1与透镜2间距增加0.032 9 mm,透镜2与透镜3间距增加0.031 1 mm,透镜3与透镜4间距增加0.020 4 mm,透镜4与透镜5间距增加0.015 4 mm。
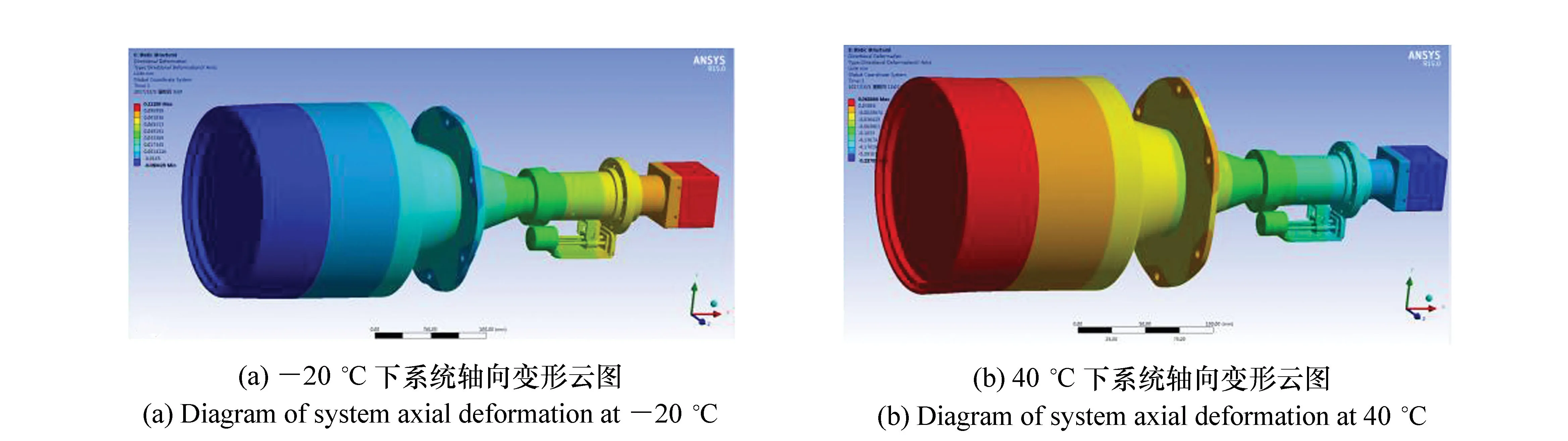
图7 不同温度下信标接收系统的有限元分析结果 Fig.7 Finite element analysis results of beacon receiver system at different temperatures

透镜1-22-33-44-5-20 ℃-0.068 4-0.065 8-0.042 3-0.033 040 ℃0.03290.031 10.020 40.015 4
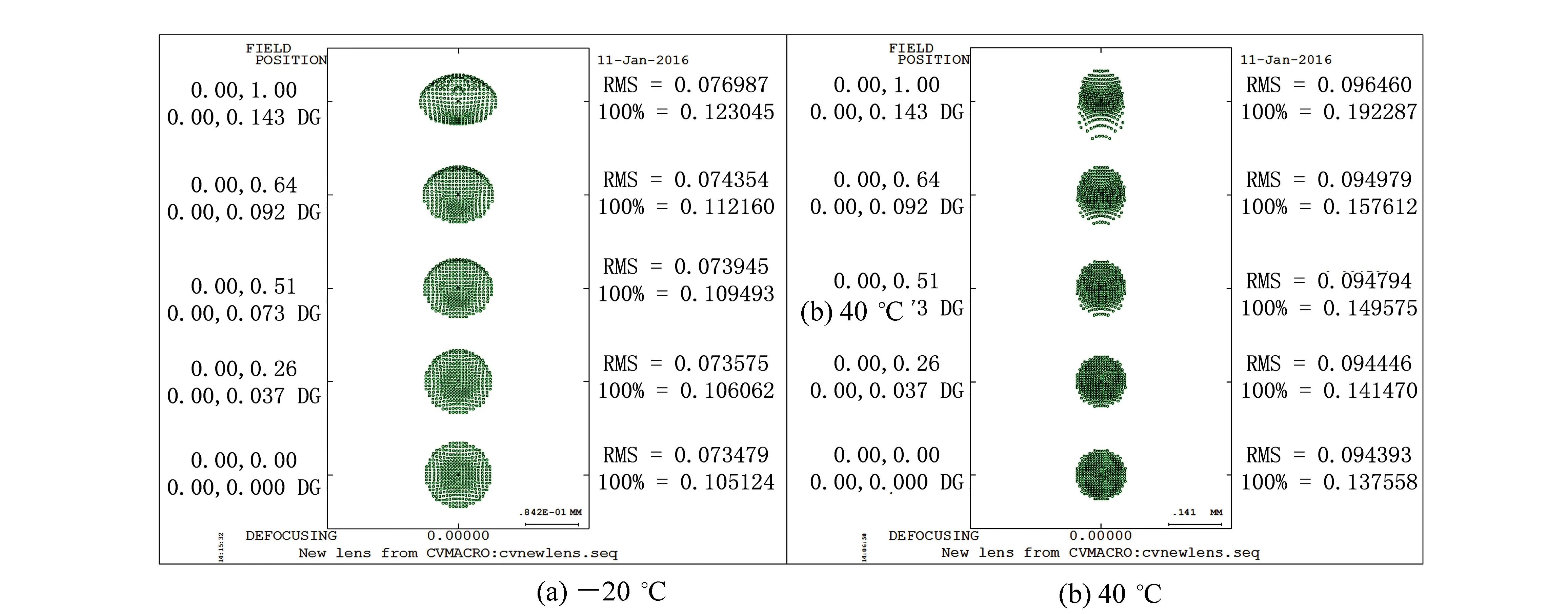
图8 不同温度下光学系统点列图 Fig.8 Spot diagram of optical system at different temperatures
将上述透镜位置的变化量输入CODE V光学设计软件中,对不同工作温度下光学系统的性能进行仿真,当环境温度降至-20 ℃时,如图8(a)所示,该光学系统点列图最大光斑尺寸为77 μm(边缘视场5 mrad);当环境温度升至40 ℃时,如图8(b)所示,该光学系统点列图最大光斑尺寸为96 μm(边缘视场5 mrad)。由仿真结果可知,在工作温度范围内(-20~40 ℃),信标接收系统无法满足跟瞄系统所要求的光斑尺寸不大于5×5像元(25 μm×25 μm)的技术要求,因此需要进行温度补偿,并分别针对2.2节中两种温度补偿方案进行仿真。
当以透镜4作为移动镜时,向前移动0.154 8 mm时,能够补偿环境温度-20 ℃时光学系统成像光斑的弥散情况,如图9(a)所示,中心视场光斑尺寸为2.2 μm,边缘视场光斑尺寸为16.7 μm,考虑透镜移动的位置误差(0.02 mm),如图9(b)所示,中心视场光斑尺寸为10.1 μm,边缘视场光斑尺寸为19.5 μm。透镜向后移动0.193 6 mm可以补偿环境温度40 ℃时光学系统成像光斑的弥散现象,结果如图9(c)所示,中心视场光斑尺寸为1.6 μm,边缘视场光斑尺寸为15.7 μm,考虑透镜移动的位置误差(0.02 mm),如图9(d)所示,中心视场光斑尺寸为10.8 μm,边缘视场光斑尺寸为18.2 μm。
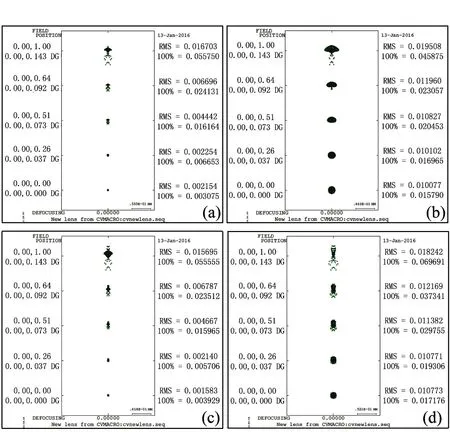
图9 透镜4的补偿效果 Fig.9 Compensation effect of lens 4
当以透镜4、透镜5作为移动镜组时,当镜组向前移动0.695 mm时,可以补偿-20 ℃时光学系统成像光斑的弥散,如图10(a)所示,中心视场光斑尺寸为2.9 μm,边缘视场光斑尺寸为15.4 μm,考虑镜组移动的位置误差(0.02 mm),如图10(b)所示,中心视场光斑尺寸为3.2 μm,边缘视场光斑尺寸为15.7 μm。镜组向后移动0.885 6 mm能够补偿40 ℃时光学系统成像光斑的弥散,如图10(c)所示,中心视场光斑尺寸为1.9 μm,边缘视场光斑尺寸为22.1 μm,考虑补偿镜组移动的位置误差(0.02 mm),如图10(d)所示,中心视场光斑尺寸为3.9 μm,边缘视场光斑尺寸为21.8 μm。

图10 透镜4、5的补偿效果 Fig.10 Compensation effect of lens 4, 5
通过以上分析结果可知,移动透镜4或透镜4、5均可以补偿由于环境温度变化产生的成像光斑弥散,补偿后的光斑尺寸也均能满足系统指标要求,但是透镜4移动的位置误差对成像光斑的尺寸影响更大,极易导致光斑尺寸超出指标要求,因此采用透镜4、5作为移动镜组更加可行。
4 实验验证
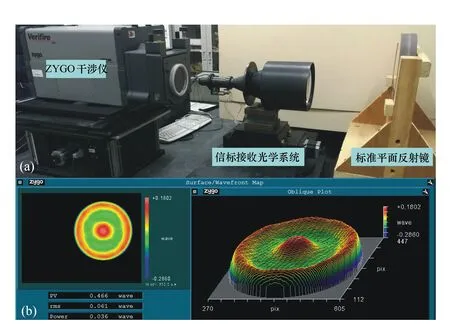
图11 信标接收镜头像质检测 Fig.11 Image quality test of beacon receiver lens
使用ZYGO干涉仪以及标准平面镜对信标接收光学系统的波像差进行检测,如图11所示,检测结果表明信标接收光学系统波像差RMS值为0.061λ(λ/16.39,λ=632.8 nm),PV值为0.466λ(λ/2.14),能够满足光电跟瞄系统信标接收镜头波像差RMS优于λ/15的指标要求。
5 结 论
本文对宽温度范围下工作的激光通信移动地面站信标接收镜头进行了研究,采用理论计算与仿真分析相结合的方法,进行了光学与光机结构的设计,对-20~40 ℃温度条件下信标接收光学系统的成像特性进行了分析,确定了以步进电机驱动的第4、5片透镜为移动镜组的机电主动式补偿方案,保证了宽工作温度范围下信标接收光学系统较为稳定的光学性能。使用ANSYS有限元分析软件对系统进行了模态分析,结果表明系统的一阶模态为370 Hz,动态刚度较好。通过CODE V与ANSYS进行联合仿真表明,环境温度降低到-20 ℃时,经过温度补偿后光学系统中心视场光斑尺寸为3.2 μm,边缘视场光斑尺寸为15.7 μm。环境温度升高到40 ℃时,经过温度补偿后光学系统中心视场光斑尺寸为3.9 μm,边缘视场光斑尺寸为21.8 μm,可以满足系统指标要求。使用ZYGO干涉仪对信标接收光学系统的像质进行了检测,结果表明系统波像差RMS值0.061λ,能够满足系统波像差小于λ/15的指标要求。