基于实时位置追踪的公交信号优先控制系统
2018-10-15华璟怡刘成生
徐 棱, 华璟怡, 刘成生
(公安部交通管理科学研究所, 江苏无锡 214151)
0 引言
公交信号优先可分为被动优先、主动优先以及实时优先。国内外的相关领域学者对公交信号优先已有大量研究,Yagar、Sunkari、马万经、杨晓光等的研究结果表明被动优先仅在公交车辆流量较大且车辆运行状态稳定时有一定控制效果[1-3]。实际场景中公交车因干扰因素较多,难以达到固定时刻、间隔到达的稳定运行状态。Elias对加州3.8 英里道路9 个信号控制交叉口的公交信号优先控制系统分析发现,公交车辆行程时间减少23%[4]。Vincent等通过建立微观仿真模型研究了绿灯延长、红灯缩短及有无恢复算法组合成的5 种优先控制策略[5]。李赫楠对单个交叉口的公交优先信号控制的策略及配时优化方法进行了研究[6]。谭永朝研究了混合交通条件下公交信号实时优先模式[7]。上述学者的研究结果表明主动、实时优先可在降低公交车延误、减少行程时间的同时,兼顾考虑社会车辆的需求,取得较好的公交信号优先控制效果。目前,北京、上海、广州、深圳、杭州、昆明和武汉等都在大力发展快速公交系统,通过开辟公交车专用车道,在交叉口附近实时检测公交车并采用公交信号优先来保障公交车快速通过。其中,实施效果较好的常州快速BRT公交系统,通过实施公交优先使全线平均运行速度达到25.64 km/h,人均出行时间减少15 min。南京建邺区2014年在269个路口实施公交信号优先控制,公交车辆的平均车速提高15%,停车次数降低30%,出行效率显著提高。
主动优先与实时优先都是利用数学模型算法进行交通状况数据预测,通过检测公交车辆位置、行驶速度结合信号配时方案等要素,对交通信号采取延长、缩短或插入相位的调整方法来保障公交车辆优先通行。其公交优先策略、模型中公交车从检测点到驶离停车线的时间作为非常重要的一个参数,是优化公交信号优先策略的基础条件,也是影响优先效益的关键因素,对优先控制的实际效果影响重大。现有研究及应用中,公交车辆的主要使用基于固定点的单次检测,交叉口无公交专用进口车道时,公交车从检测点到停车线的路程中,可能受到各种因素的干扰,导致预测时间与实际时间偏离较大。本研究拟使用公交车辆的实时GPS信息,结合GIS道路数据纠偏来检测车辆位置,通过4G移动通信网络连续传输,来实时追踪并优化计算其到达停车线的时间。
1 基于GPS与GIS的检测方法
准确的检测公交车辆是公交信号优先实施的基础,现有公交车辆检测方法主要包含以下几种。交叉口设有公交专用进口道,可通过布设地感线圈、地磁、视频等常规检测器来检测公交车辆;交叉口无公交专用进口道,可通过基于图像识别的视频检测间接识别,也可通过全球定位系统 (GPS)或射频识别技术(RFID)直接识别。公交车密集运行的城市道路交叉口空间资源非常有限,在作为道路交通瓶颈的交叉口增设公交专用道需要缩减其他流向机动车道,对交叉口通行影响很大。基于图像识别的方法对于包含多种目标类别的信号交叉口路段公交车识别的鲁棒性问题,目前研究方法比较欠缺,存在检测精度不高和运算速度慢等问题[8]。利用智能交通信息设备直接实现对公交车的识别目前技术相对成熟,可靠性较高。射频识别技术(RFID)成本高,设备易损坏、维护工作量大,安装条件与检测范围受限,难以获取全面的道路交通状态信息等缺点。
GPS以往在公交运营系统中使用较多,近几年,随着GPS及移动无线通信技术的发展,基于GPS采集公交车信息并利用4G移动通信技术实时传输信息来构建公交信号优先系统已得到广泛应用。
基于公交车必然在道路行驶,且通常具有固定行驶线路的运行特性,可通过电子地图道路网络数据对公交车GPS位置进行纠偏处理,将车辆匹配到正确的道路路段。位置纠偏的主要流程见图1,第1步:GPS数据预处理,包括建立缓冲存储历史数据,根据历史的位置、速度信息进行漂移修正以及定位坐标系到地图坐标系转换等;第2步:道路定位,基于预先采集的公交车线路、路网道路信息,以及车辆的历史轨迹进行道路路段匹配;第3步:对GPS位置点向匹配到的临近路段进行投影,根据最短距离原则对比历史位置点以及GIS道路信息确定在路段上的位置点坐标,参见图2。通过道路实验测试,纠偏后的位置点与时间观测的位置点误差约3~6 m,纠偏前后的对比见图3。考虑公交车在交叉口的行驶速度一般在20~30 km/h,由此导致的时间误差在1.5 s以内,对优先控制效果的影响在可接受范围内。

图1 GPS位置纠偏主要流程

图2 GPS位置点路段投影示意图
采用基于GPS的公交车检测方案的公交优先控制策略,控制参数全部位于中心系统,可在电子地图中标识出公交站台的位置或路口通行条件,通过调整参数或控制方法来适应后期交通渠化调整、通行条件改变、线路调整等情况,具有较高的灵活性和良好的适应性。该检测方法在交叉口有无公交专用道情况下都可适用,并且通过绿灯延长后可进一步跟踪得知目标公交车是否通过路口、评估优先结果、优化优先参数,针对目标车辆实现更加精准的优先控制。
2 实时位置追踪的优先控制方法
公交信号主动优先控制一般包含以下3种控制方法,见图4。(1)绿灯延长。检测公交车到达后,根据预测模型,计算其到达停车线所需时间Δt,在优先相位(B相位)基础绿灯之内(t1~t2)到达检测点的公交车,可通过交叉口不调整。在优先相位基础绿灯时间外到最大绿灯时间(t2~t3)到达,延长
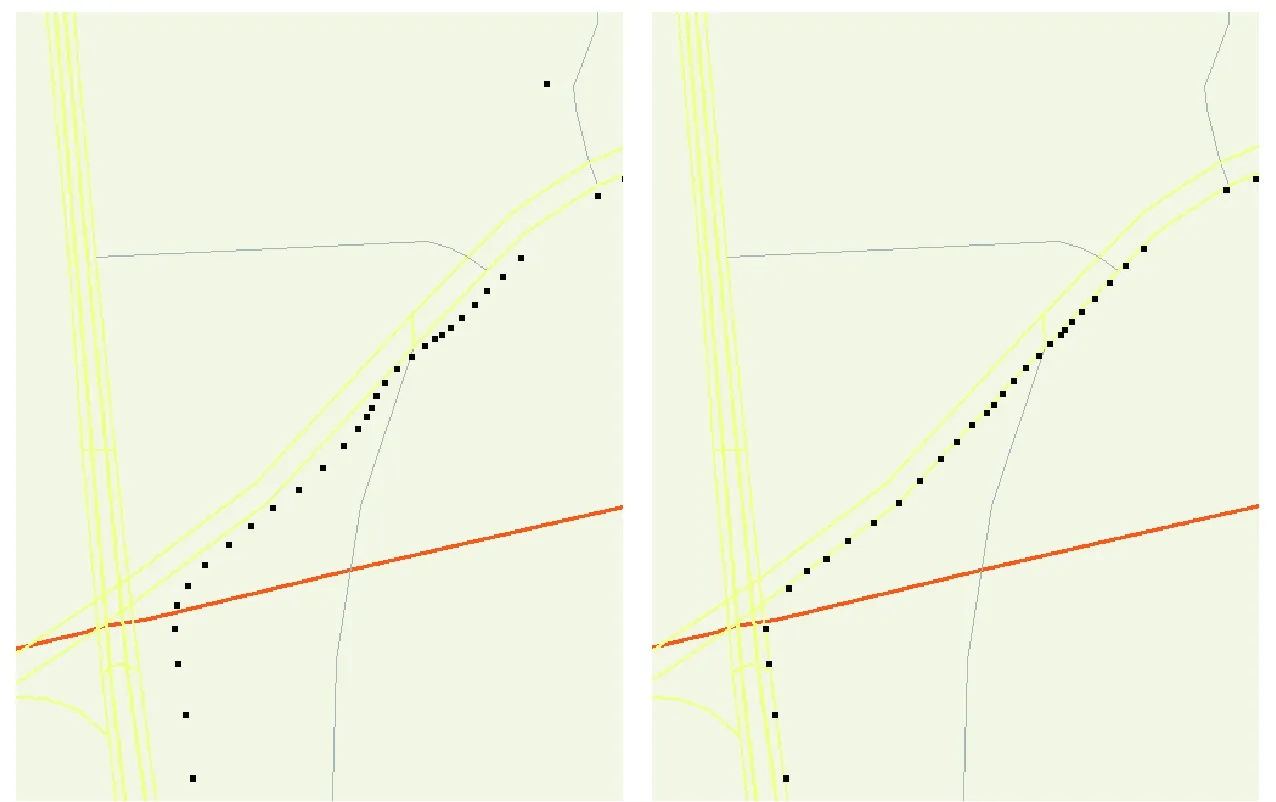
图3 纠偏前后对比
绿灯时间使到达公交车通过。并以相位最大绿灯时间为约束,即t3时间点之后仍有公交车到达也不再进行绿灯延长;(2)红灯缩短。当公交车在t3~t5时刻到达,缩短公交车通行方向红灯时间;(3)插入相位。公交车辆在红灯期间到达,且需等待多个相位时(t3~t4),在当前相位结尾(图4中C或D相位结束后)插入对应公交通行相位(B相位)来使公交车尽快通过。

图4 主动优先控制方法
主动优先控制中,优先模块通过计算预测公交车抵达信号交叉口停车线的时刻来进行信号调整,预测时间对优先方法的选择、优先控制的效果影响很大。传统固定点检测在交叉口有前次未通过公交车滞留或混合通行的无公交专用进口道情况下,预测时间的准确率无法保证。
基于实时位置追踪的优先控制方法在公交车至停车线的行程时间预测上采用多次采样修正,即通过增加检测采样频率,变原来的单次检测并计算行程时间为对进入优先路口监测路段的公交车连续采样并计算,通过后一次的计算对前次检测计算的结果进行修正来提高预测时间的准确率。其中优先路口的监测路段定义为公交站台与公交路口停车线之间,且避开对公交车行驶干扰较大区域的路段,其长度支持根据不同时段信号方案周期、最小绿、最大延长绿等信号参数动态调整。在交通信号的时间调整上采用小步幅逐渐逼近方法,即当前时间到绿灯结束时间大于检测时间间隔时,不做延长;在其小于检测时间间隔时,每次延长一个大于或等于检测时间间隔的单位时间,然后等待下一次计算修正的结果。实时位置追踪的优先控制方法主要控制流程如图5所示。
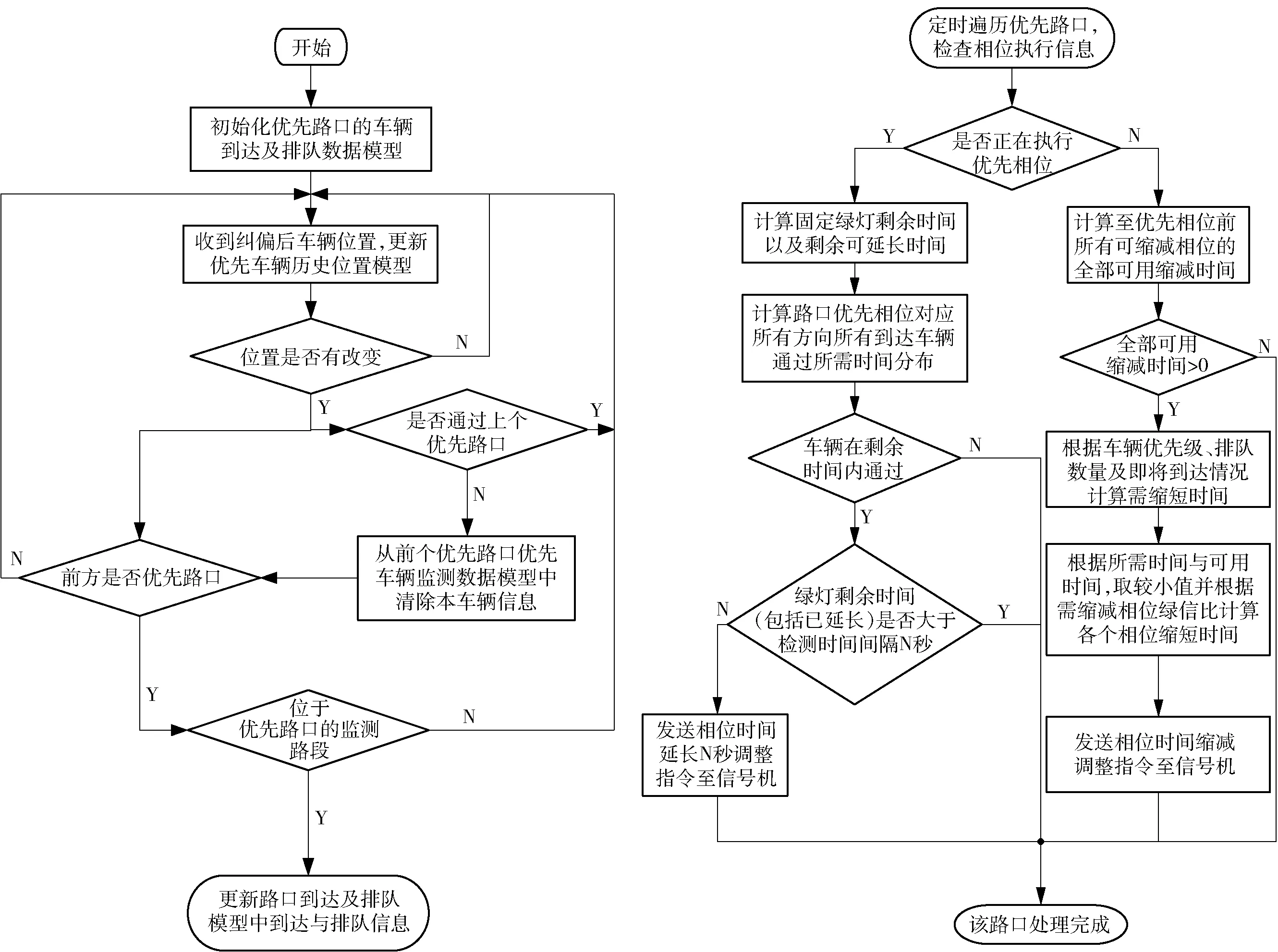
图5 主要控制流程
优先路口车辆到达及排队数据模型包含了优先相位对应的一到多个进口流向数据,流向的到达车辆信息和排队车辆信息。到达车辆信息包括:时间、速度、到路口距离及预测时间。排队车辆信息包括:时间、速度、到路口距离、预测时间、排队时间及排队数量等。优先车辆历史位置数据模型缓存了车辆一定数量的历史信息,信息包括:位置、时间和速度。
上述控制方法在交叉口有公交专用进口道的情况下可以使用,通过连续的位置追踪及计算修正,也可以用于路口无公交专用进口道的情况,适应我国路口复杂多变的交通条件,实现对公交车实时、精确的信号优先控制。
3 系统构建及实现
3.1 总体架构
基于实时位置追踪的公交信号优先控制系统由三部分组成,包括:公交车上的可视化车载终端、控制中心的中心信号控制子系统及外场的信号机优先信号执行子系统,总体架构见图6。车载终端实时采集车辆的GPS信息,通过移动无线通信网络传输至控制中心,中心进行优先决策后,把结果下发至路口信号机执行,同时通知车载终端。
3.1.1 可视化车载终端及APP
可视化车载终端设计选择支持GPS、4G移动无线通信及支持触摸显示屏的工控平板电脑作为硬件平台,使用Andriod软件操作系统,设计并开发车载公交优先App软件来实现车载端的功能。主要包括:参数配置、GPS数据处理、GIS显示、数据通信、优先信号显示等,主要功能界面见图7。
参数配置单元实现对公交车辆参数、传输参数的配置。GPS数据处理及进行符合NMEA0183协议的GPS数据采集、预处理。GIS显示单元主要负责把纠偏后的车辆实时位置显示在电子地图。数据通信单元通过4G移动通信网络与中心公交优先服务模块进行通信,发送车辆编号、位置、速度信息至中心,接收中心下发的优先控制结果及车辆前方即将到达路口的信号调整结果。优先信息显示单元用于显示车辆即将到达的路口的公交信号灯灯色信息及剩余时间信息并辅助语音提示,为公交驾驶员实时提供准确的交通信号和通行指引。
3.1.2 中心信号控制子系统

图6 系统组成及总体架构图

图7 车载终端APP主要功能界面
中心公交优先参数配置与服务功能通过在现有信号控制系统主体架构上扩展公交优先相关模块来实现,主要包括:优先参数配置、运行监视、车辆位置信息接收与预处理、优先决策及调度等。
公交优先参数配置与运行监视模块可实现公交优先线路、优先控制策略与方法、相位最小绿、延长绿等参数的图形化配置与监视。车辆位置信息收与预处理服务模块根据公交优先线路、公交车辆实时位置等信息,建立各交叉口公交车排队和到达模型。该模块设计采用分布式架构,支持多实例运行,单个实例可接入并处理500辆公交车数据,可配置多个实例数来适应不同的应用规模。优先决策及调度模块根据交叉口的优先控制参数、公交车排队和达到信息,决策当前时间点是否需要对相位进行信号优先干预控制,并实时执行。
3.1.3 信号机优先信号执行子系统
信号机的优先信号执行子系统包括公交优先参数解析与传输,优先控制干预指令执行等模块。主要实现与上位机进行网络通信,接收公交优先参数读写、优先相位时间调整、插入优先相位等控制指令,进行参数的完整性校验、指令的安全校验、执行指令并返回执行结果等。
3.2 测试验证
选择在江苏省无锡市钱荣路由北向南钱胡路至大池路段、贡湖大道由北向南锡南路至观山路段2条主干道上共8个路口进行测试验证,通过车载终端准确的检测公交车位置与行驶情况并对交叉口发送优先控制指令调整交通信号对其优先放行。系统实施前后对比可见启用公交信号优先后公交车的延误得到很大改善,在路口停车率降低。以贡湖大道部分路段为例,贡湖大道是连接无锡中心城区与副中心城区(太湖新城)最便捷、直接的主干道之一,全长8.95 km。其锡南路至观山路段全线双向6车道,南北向为交通主流向,也是主要的公交线路通道(见下图8),有7、59、105、133、135等多条公交线路通行。
排除转弯路口观山路,选择锡南路到高浪路4个无公交专用进口车道交叉口实施公交优先前后的交通数据对比,公交车通过的平均速度由20.7 km/h提升至25.3 km/h,提高22%,平均旅行时间由5.33 min秒减少至4.37 min,缩短18%,控制效果良好。

图8 贡湖大路路段交叉口及公交线路
4 总结
本文对公交信号优先控制展开了研究,介绍了基于实时GPS位置追踪及GIS修正的公交检测模式,及基于该检测模式的公交信号优先控制方法,设计了一种基于实时位置追踪的公交信号优先控制系统,给出了具体的系统构架以及设计功能实现。通过实际道路应用测试,验证了系统的可行性、有效性,为新的检测、通信技术条件下公交信号优先系统的建设提供新的思路与方法。
本研究还存在一些不足之处。受实验条件限制,仅在部分道路路口进行了测试应用,测试车辆数量和路网规模有限。下一步还需要结合实际项目进一步开展大容量、大范围应用测试并完善,可对接公交运营系统的数据,根据车辆载客率及准点情况进一步优化车辆优先参数,实现更加精准的优先控制。
