适用于MMC多端柔性直流配电网的改进电压下垂控制研究
2018-10-13朱余林袁旭峰陈明洋李芷萧
朱余林, 袁旭峰, 陈明洋, 李 宁, 胡 晟, 李芷萧
(贵州大学 电气工程学院,贵州 贵阳 550025)
0 引 言
柔性直流输电技术已经相对成熟,并在世界范围内已经有相关工程应用,但在配电网中应用比输电网落后[1,2]。随着地方经济的发展,城市负荷逐年增加,传统配电网无论是从其网架结构还是自动化调控系统,都不能适应现代多元化的供电方式[3~6]。
与传统交流配电网相比,直流配电网具有以下几个方面的优势[7,8]:(1)与分布式电源柔性互联。直流配电网由于少了AC/DC这一环节,可以减少电能变换装置的投入以及电能变换过程中的能量损耗。(2)直流线路使用的材料(两线)比交流线路(三相三线或三相四线制)少,并且线路投运时,直流线路的电阻性损耗较低,同时不存在交流电网中的介质损耗。(3)直流配电的可靠性高。直流线路不存在功角和频率稳定的问题,也不受无功功率的限制,供电可靠性更高[9,10]。MMC的出现,以其模块化程度高、拓展性好、易于冗余设计、开关损耗小,谐波性好、有功无功功率独立控制、可进行无源孤岛供电等诸多优点,已在国内外多个工程中得到验证[11~14]。文献[15]说明电压下垂控制适合多端直流系统,各个换流器的功率量和直流侧母线电压之间相互独立。文献[16,17]提出了一种分段的电压下垂控制策略,但是该策略无法消除静态误差。
本文针对柔性多端直流系统,提出一种改进直流电压下垂策略,在系统出现功率波动引起直流母线变化的情况下能够抑制电压过大波动,消除电压越限,更有利于MTDC系统的电压稳定。最后在PSCAD/EMTDC仿真平台上搭建了并联四端直流配电系统,验证了所提控制策略的有效性。
1 MMC拓扑结构及数学模型
1.1 MMC拓扑结构
如图1所示,MMC由6组换流桥臂构成,6组换流桥臂构成三相换流器[18]。

图1 三相MMC系统拓扑结构
1.2 MMC数学模型
图2是三相MMC等效电路。图2中,usj和isj分别为第j相交流侧相电压和相电流(j=a,b,c);R和L分别是MMC桥臂等效电阻和电感;uPj和uNj分别等效第j相上、下桥臂电容电压;iPj和iNj分别等效流过第j相上、下桥臂电流;Udc和Idc分别是直流侧电压和电流。

图2 三相MMC等效电路
对A相桥臂列基尔霍夫电压方程,得[19]:
(1)
式中:Udc为直流母线电压;uPa和uNa分别为上、下桥臂电压。
列基尔霍夫电流方程,得:
(2)
式中:idc和iZa分别为直流母线电流和环流中的谐波分量;iPa和iNa分别为上、下桥臂电流。
MMC第j相的上、下桥臂电压参考值为:
(3)
(4)
式中:uj是第j相内部电动势;usumj是不平衡电动势,用以控制环流。
1.3 MTDC数学模型
图3所示为单端MMC-MTDC数学模型。

图3 单端MMC-MTDC模型
图3中,Vsjm(j=a, b, c,表示abc三相;m=1,2,3,4,表示端数)为交流侧相电压;Vejm为输出相电压;Rm为等效电阻;Lm为等效电感。由图3可得:
(5)
式中:Im、Vsm、Vem均为矩阵向量。式(5)经dq变换得:
(6)
式中:idm、iqm分别为第m个换流器交流电流矢量d、q轴分量;Vsdm、Vsqm为第m个换流器交流电压矢量d、q轴分量;Vedm、Veqm为第m个换流器输出点电压矢量d、q轴分量。
推导得到在dq旋转坐标系下第m个MMC的交流侧的有功功率Psm和无功功率Qsm:
(7)
2 改进电压下垂控制
2.1 传统电压下垂控制
传统直流下垂控制如图4所示。

图4 电压下垂控制内环电流控制器
图4(a)表示换流器有功功率与直流电压的关系。二者呈线性关系,对直流电压的控制会引起有功功率的静态偏差,反之亦然,二者相互制约。电压下垂控制把有功功率控制与直流电压控制结合在一个控制器内,如图4(b)所示。其中,得到图4(b)中的误差信号e:
e=Pref-P+KR(Udcref-Udc)
(8)
式中:Pref、P为功率参考值和实际值;Udcref、Udc为直流电压参考值和实际值。稳态运行情况下,得到e=0,那么系统直流母线电压可以表示为:
(9)
传统下垂的控制力度由电压下垂控制比例系数KR决定。比例系数需要谨慎选取,既要兼顾电压控制效果和功率分配特性,又要确保系统正常运行。对于交直流配电网而言,其负荷功率波动大,MTDC各端MMC需频繁调节,固定下垂系数易引起直流电压越限,将失去对直流电压的控制能力,从而影响MTDC在柔性互联配电网中的调节控制性能。
2.2 改进电压下垂控制
改进电压下垂控制是利用分段的思想,若所测得的直流电压在事先设定的直流参考电压的最大值和最小值之内,就相当于传统的电压下垂控制;一旦所测直流电压越限,通过改进电压下垂控制使其他换流器参与直流电压控制,进而增加或者降低原有参与下垂控制MMC换流器的输送功率。
基于以上分析,基于改进电压下垂控制方法的控制器结构如图5所示。

图5 改进电压下垂控制器结构
(10)
式中:Ulim为限制电压;Udc为MMC直流侧电压;UsetL和UsetH分别为设定的MMC直流侧电压最小值和最大值;Klim定义为限制比例。
3 算例分析
基于PSCADEMTDC搭建图6所示的4端并联MMC-MTDC仿真模型。
系统仿真参数如下:桥臂子模块数目N=20,系统直流母线电压Udc=±10 kV,子模块电容C= 9 600 μF,子模块电压Uc=1 kV,桥臂串联电抗值LMMC1、2、3=8 mH,LMMC4=12 mH,等效电阻R= 0.1 Ω,忽略直流线路阻抗;交流系统频率50 Hz,隔离变压器采用YNd接线。
各端仿真参数如下:MMC1采用定有功功率控制方式,功率额定值为6 MW;MMC2、MMC3采用改进的电压下垂控制方式,其下垂控制比例系数KR取值为1.6,其限制比例Klim取14,直流电压额定值为20 kV,MMC2功率额定值为8 MW,MMC3功率额定值为-8 MW;MMC4采用定交流电压控制方式,交流负荷值设置为-6 MW;直流电压上下限为±3%。

图6 4端柔性直流配电系统拓扑结构
3.1 功率扰动仿真
图7为功率扰动下的直流电压及各端功率变化。在2 s时,MMC1的功率设定值由6 MW减少至4 MW,3 s时MMC1功率设定值升至8 MW,4 s 时MMC1功率指令值恢复6 MW,系统回到最初运行状态。可见,改进电压下垂控制在系统稳态运行及小扰动的工况下,表现出较好的控制性能。

图7 直流电压及各端功率波形变化
3.2 交流侧故障仿真
以MMC3交流侧发生三相短路为例,分析系统运行情况。MMC1采用定有功功率控制方式,功率额定值为5 MW;MMC2、MMC3采用改进的电压下垂控制方式,直流电压额定值为20 kV,MMC2功率额定值为9 MW,MMC3功率额定值为-8 MW;MMC4采用定交流电压控制方式,交流负荷值设置为-6 MW。仿真结果如图8所示。
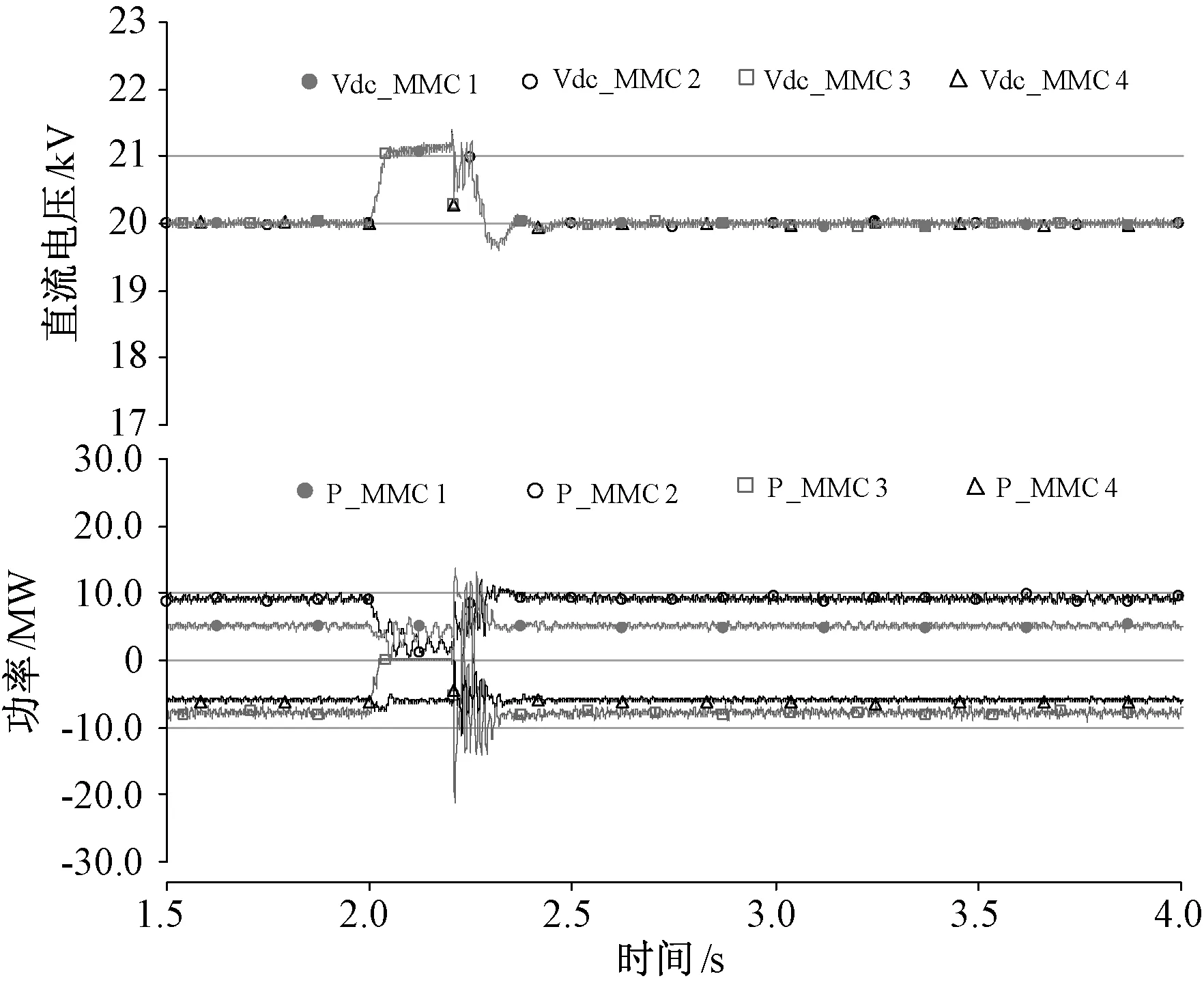
图8 三相故障直流电压及各端功率波形变化
通过图8可以看到,在2 s发生三相故障后,系统直流电压升高至21 kV,MMC1及MMC2功率持续波动,MMC4交流侧输出功率保持恒定;故障持续0.2 s,此后直流电压及功率经0.2 s恢复正常。
3.3 MMC故障仿真
对各端功率参数做了一些调整,具体如下:MMC1采用定有功功率控制方式,功率额定值调整为9 MW;MMC2、MMC3采用改进的电压下垂控制方式,直流电压额定值为20 kV,MMC2功率额定值为5 MW,MMC3功率额定值为-8 MW;MMC4采用定交流电压控制方式,交流负荷值设置为-6 MW;直流电压上下限为±3%(为突出直流电压的变化,电压波形只截取部分波形)。
3.3.1 MMC2故障退出仿真
为验证当系统中只有单个换流站运行于改进电压下垂控制时的控制特性,同时验证换流器功率双向传输的可行性,本节设置MMC2退出运行,同时对功率设定进行调整:MMC1采用定有功功率控制方式,功率额定值调整为4 MW;MMC2、MMC3采用改进的电压下垂控制方式,直流电压额定值为20 kV,MMC2功率额定值为7 MW,MMC3功率额定值为-5 MW;MMC4采用定交流电压控制方式,交流负荷值设置为-6 MW;直流电压上下限为±3%。
如图9和图10所示,在2 s时MMC2因故障退出运行造成系统功率缺额,采用改进电压下垂控制时,系统直流电压过渡迅速,平缓下降至19.6 kV附近,电压过渡时间只持续了不到0.02 s,系统运行效果优于传统电压下垂控制。

图9 直流电压波形

图10 各端功率波形
在2 s时MMC2因故障退出运行使得MMC2功率值降为0,此时系统中只有MMC3运行于电压下垂控制方式,MMC3功率反向,MMC1、MMC4输出功率保持平稳。通过二者对比可以看到,改进电压下垂控制在换流器退出运行过渡至新的稳态的过程中,功率波动较传统控制时间更短,约为0.2 s,使得系统更快地过渡至稳态运行。
通过以上仿真分析可知,改进电压下垂控制适用于MTDC系统,能够满足正常运行及各类故障情况下的控制需求,且能够有效地降低系统直流电压的大幅波动,防止电压越限。
3.3.2 MMC4故障退出仿真
系统出现功率过剩时,系统直流电压升高波形图,如图11所示。

图11 直流电压波形
在2 s时无源端MMC4退出运行,采用传统电压下垂控制时,直流电压上升至20.6 kV,而后恢复至20.4 kV附近,电压恢复时间大概持续0.08 s;而采用改进电压下垂方法,系统直流电压逐渐升高并稳定在20.4 kV附近,消除了过电压。
如图12所示,在2 s时无源端MMC4退出运行,MMC2功率由5 MW降为2 MW左右,MMC3逆变功率升至11 MW附近,相比于传统电压下垂控制,采用改进电压下垂控制功率过渡明显更快。

图12 各端功率波形
4 结论
(1)本文通过介绍MMC及MTDC的数学模型,在传统的电压下垂控制基础上,提出了适用于多端柔性直流配电系统的改进电压下垂控制策略,该策略适用于功率波动频繁的配电网。
(2)在PSCAD/EMTDC仿真平台上搭建了并联四端MMC系统,验证所提出改进电压下垂控制在功率发生扰动、交流侧发生三相短路以及MMC发生故障时的有效性,并与传统的电压下垂控制策略相关波形进行比较。仿真波形表明,所提的策略能够满足正常运行及各类故障情况下的控制需求,并且能够有效地降低系统直流电压的大幅波动,防止电压越限,并维持在设定的稳定范围内,更有利于直流配电网的稳定运行。
