基于电子格栅的无人机防冲突研究
2018-10-10杨秀玉朱代武向越新
杨秀玉,朱代武,向越新
(中国民用航空飞行学院,四川 广汉 618307)
随着无人机产业的不断发展,无人机不断被人们所接受,且使用者越来越多。我国自主研发的新型彩虹太阳能无人机已圆满完成临近空间飞行试验,飞行高度达到20 000 m,共计飞行了15 h。由于很多小型无人机并非航空公司制造,或并非航空工程师设计,控制飞行的不是训练有素的飞行员,提供服务的亦非训练有素的技师[1],因此无人机没有通常意义上的“感知与规避”能力,加之我国目前缺少相应的规章制度对无人机进行管理,因此导致2017年上半年国内接连发生了多起民用无人机闯入载人民航飞机航线或机场范围的事件。例如:2017年3月13日,无人机导致朝阳机场短暂关闭;2017年4月20日,无人机导致南京机场短暂关闭,其后在接下来的4、5月份,西南地区3大机场昆明长水机场、成都双流机场和重庆江北机场频繁遭遇无人机干扰,导致航班大面积延误[2]。因此,研究防止无人机发生冲突的方法具有重要意义。
目前国内外许多学者对无人机防冲突的方法进行了研究。如李洋[3]提出无人机多传感器信息融合防撞方案,结合融合后精度较高的无人机高度和俯仰角数据,以近地高坡为例设计了无人机自主防撞轨迹,从而实现无人机自主防撞效能;李嘉等[4]设计了一种基于备选扇区思想的防撞算法,以实现无人机复杂环境下的自主飞行;韩统等[5]针对非合作型动态障碍对无人机自主防碰撞问题进行了研究,并基于最优化理论设计了无人机自主防碰撞规避策略。
上述研究都是在无人机的运行控制上设计算法以防止无人机发生冲突,而利用划分无人机飞行范围的方法来防止无人机发生冲突的研究还未见报道。为此,本文利用目前主流无人机的机载全球定位系统(Global Positioning System,GPS)设备进行定位来设立移动目标物电子格栅,即通过卫星定位无人机和移动目标物的位置,在无人机和移动目标物所在一定范围的空域内设立虚拟屏障,限制无人机的飞行范围,以防止无人机与移动目标物相撞。
1 电子格栅模型的建立
1. 1 移动目标物的分类
无人机在空中飞行时,除了可能与固定目标物发生冲突外,还可能与空中的移动目标物发生冲突。本文将移动目标物分为无人机和有人驾驶飞机两种,移动物体指的是无人机与之可能在空中发生冲突的移动目标物的总称。
为了确保安全、有序和充分地利用空域,满足不同空域用户的需求和空域资源的最优配置,我国《民用航空使用空域办法》中对空域进行了分类,即航路、航线和民用机场区域设置高空管制区、中低空管制区、终端区(进近)管制区和机场塔台管制地带,通常情况下这4类空域被分别称为A类、B类、C类和D类空域[6],其高度范围为地球表面到6 000 m以上。
无人机飞行空域正由超低空、低空向中高空甚至临近空间扩展,目前飞行高度为50~20 000 m,涵盖了所有军民航飞行空域[7]。因此,无人机在空中飞行时与飞行中的其他无人机和各类有人驾驶飞机都有发生冲突的可能性。
1. 2 无人机与移动目标物冲突情况的分类
依据移动目标物的分类可将无人机可能发生冲突的情况分为两类:无人机与无人机的冲突、无人机与有人驾驶飞机的冲突。无人机与移动目标物发生冲突可能在同一高度层或不同高度层,其中在同一高度层发生冲突存在以下3种情况:
(1) 无人机与移动目标物对头飞行发生冲突,本文以旋翼无人机A与旋翼无人机B发生冲突的情况为例(下同),作在同一高度层对头飞行发生冲突的俯视图,见图1。
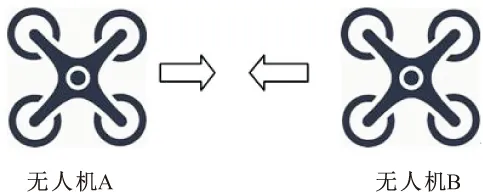
图1 无人机A与无人机B在同一高度层对头飞行发生冲突俯视图Fig.1 Overview of the conflict between UAV A and UAV B flying opposite at the same altitude level
(2) 当无人机与移动目标物在同一高度层相向飞行,无人机位于移动目标物后且速度大于移动目标物时,其发生冲突的俯视图见图2。
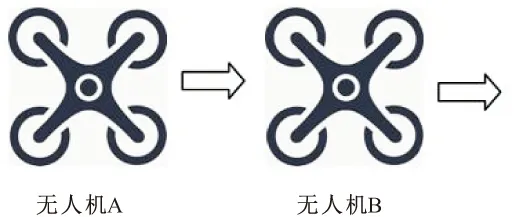
图2 无人机A与无人机B在同一高度层相向飞行发生冲突俯视图Fig.2 Overview of the conflict between UAV A and UAV B flying in the same direction at the same altitude level
(3) 当无人机与移动目标物在同一高度层交叉飞行时,可能出现3种冲突情况:无人机与移动目标物飞行航路夹角小于90°;无人机与移动目标物飞行航路夹角等于90°;无人机与移动目标物飞行航路夹角大于90°。这3种冲突情况俯视图见图3。
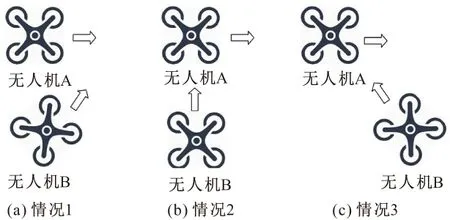
图3 无人机A与无人机B在同一高度层交叉飞行发生冲突俯视图Fig.3 Overview of conflicts between UAV A and UAV B cross flying at the same altitude level
此外,无人机A与移动目标物在不同高度层飞行,当调整高度层时也存在发生冲突的可能性。由于旋翼无人机可以垂直上升,以无人机B由低层向高层爬升过程中与无人机A发生冲突为例,可能出现3种冲突情况,其俯视图见图4。
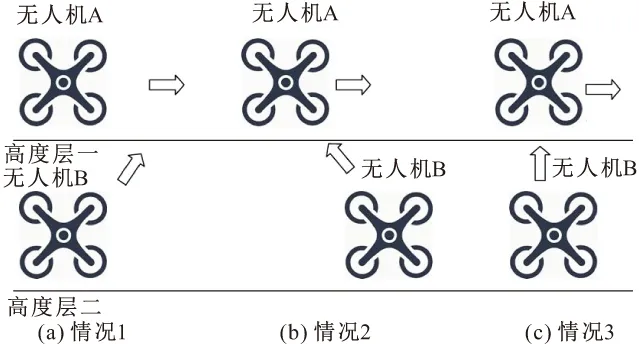
图4 无人机A与无人机B在不同高度飞行发生冲突俯视图Fig.4 Overview of conflicts between UAV A and UAV B at different altitudes
1. 3 移动物体电子格栅模型的建立
无人机可分为固定翼无人机、旋翼无人机等类型,其中民用无人机多以旋翼无人机为主;有人驾驶飞机分为螺旋桨飞机、固定翼飞机等类型,其中有人驾驶飞机多以固定翼飞机为主。本文只讨论固定翼航空器电子格栅的建立,其他类型航空器电子格栅建立的方法与之类似。
1.3.1 移动物体初始电子格栅模型的建立
对于固定翼移动物体电子格栅的建立,地球直角坐标确定的移动物体几何中心点的坐标为(Xa,Ya,Za)。在几何中心的基础上沿平行于机身轴线或机翼平均气动弦线的方向(指向前或后)量取几何中心点到机头和机尾的长度,选取更长的距离,设为la(椭球的长半轴a);沿垂直于机身轴线的方向(指向右或左)量取几何中心点到机翼翼梢的距离,选取更长的距离,设为lb(椭球的短半轴b);沿垂直于对称平面的方向(指向上或下)量取几何中心点到移动物体外表面的距离,选取更长的距离,设为lc。
建立的移动物体初始电子格栅模型为
(1)
移动物体的初始电子格栅模型图见图5,其中红色小圆点为移动物体的几何中心点。

图5 移动物体的初始电子格栅模型图Fig.5 Initial electron grid model diagram of moving object
1.3.2 考虑安全阈值的移动物体电子格栅模型的建立
本文考虑的是无人机A与无人机B或有人驾驶飞机发生冲突,采取无人机A主动避让的方式。为了保证无人机A与移动目标物的飞行安全,应在上述建立的移动物体初始电子格栅模型上增加一个安全阈值[8-9]。
移动物体初始电子格栅的安全阈值要考虑无人机A和移动目标物的飞行速度、无人机A操纵者反应时间和无人机A避开移动目标物的时间之和、无人机A所飞行的距离、GPS的定位精度。假设无人机A操纵者反应时间和无人机A避开移动目标物的时间之和为t、无人机A的飞行速度为v1、无人机B的飞行速度为v2、有人驾驶飞机的飞行速度为v3,基于GPS动态对动态定位误差精度为l,则
无人机A的安全阈值为:S1=v1·t+l
(2)
无人机B的安全阈值为:S2=v2·t+l
(3)
有人驾驶飞机的安全阈值为:S3=v3·t+l
(4)
考虑了最低安全阈值后,建立的移动物体电子格栅模型为
(i=1,2,3)
(5)
移动物体的电子格栅模型图见图6,其中红色小圆点为移动物体的几何中心点。
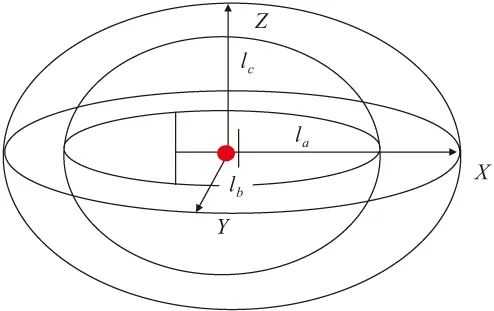
图6 移动物体的电子格栅模型图Fig.6 Electron grid model diagram of moving object
2 仿真模拟验证
为了验证建立的移动物体电子格栅模型防冲突的有效性,本文采用Matlab软件对2架无人机发生冲突的避让过程进行了仿真模拟。
模拟试验采用大疆公司2架型号为大疆PHANTOM 4的无人机,分别作为模型中的无人机A和无人机B。大疆PHANTOM 4无人机为四轴飞行器,飞行载重1 380 g,垂直悬停精度为0.1 m(超声波工作范围内),水平悬停精度为0.3 m(视觉传感器工作范围内);无人机升降速度最大上升速度为6 m/s(运动模式),最大下降速度为4 m/s(运动模式),飞行速度为20 m/s(运动模式),飞行高度为6 000 m,飞行时间约为28 min,轴距为350 mm,螺旋桨为9450S快拆桨;无人机遥控器工作频率为2.400~2.483 GHz,控制距离为5 000 m。因大疆PHANTOM 4无人机体积很小,设定无人机A、B初始电子格栅半径为1 m。采用的模拟试验方案为:无人机A与无人机B在同一高度从相距1 700 m的位置对头飞行,发生飞行冲突;事先设定无人机A从右边避让,避让时间为5 s,无人机操纵者反应时间为3 s,并根据刘立龙[10]的研究,GPS动态对动态相对定位误差为厘米级,在此将GPS定位误差设定为1 m,验证2架无人机是否相撞。
根据前述无人机A防冲突电子格栅安全阈值的确定方法,可得到无人机A的安全阈值为S=v·t+l=20×(3+5)+1=161 (m)。
本文应用Matlab软件仿真模拟无人机A与无人机B在上述情形下的飞行路径,以验证建立的移动物体电子格栅模型防冲突的有效性。仿真模拟得到的2驾无人机防冲突避让过程路径见图7。
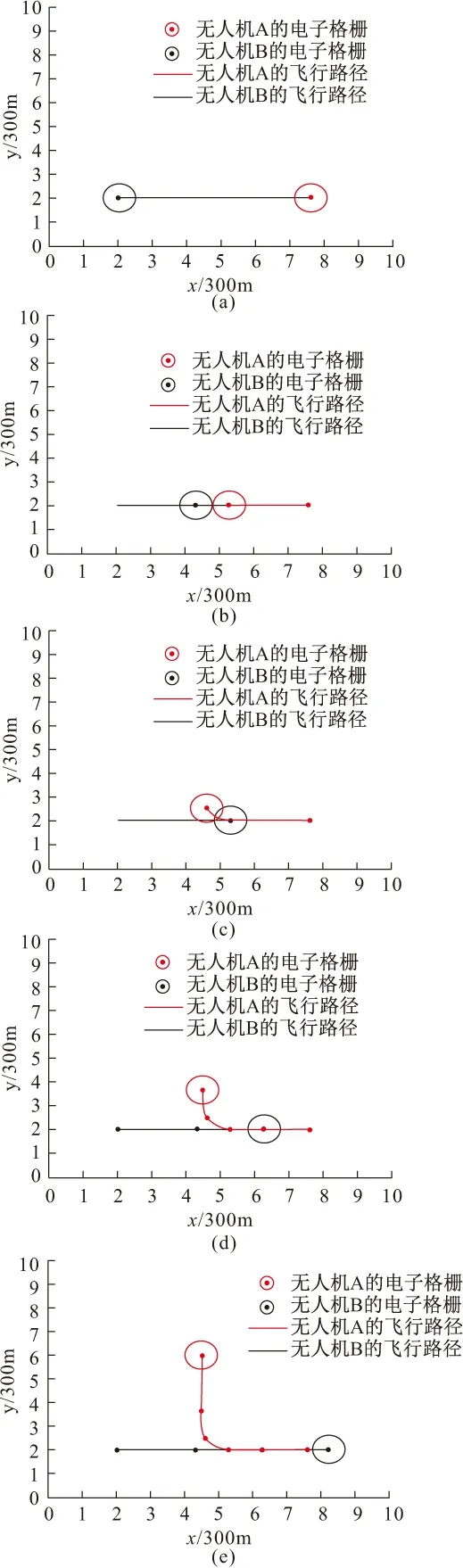
图7 无人机A与无人机B防冲突避让过程路径示意图Fig.7 Conflict avoidance diagram of UAV A and UAV B注: 红、黑色小圆点表示无人机A、B的初始电子格栅; 红、黑色圆圈表示无人机A、B完善后的电子格栅。
图7中:无人机A与无人机B在相距1 700 m的位置开始相向飞行[见图7(a)];无人机A与无人机B的两个电子格栅相接触[见图7(b)];无人机A与无人机B相接触时,无人机A立即向前以4 m/s2的减速度减速,向右以4 m/s2的加速度加速到20 m/s进行避让,在避让过程中它们的电子格栅相交,但无人机并没有相撞[见图7(c)];无人机A已成功避让无人机B继续向右飞行,无人机B保持原来的飞行路径继续前进[见图7(d)];无人机A与无人机B保持上述飞行路径继续飞行一段[见图7(e)]。可见,采取上述的防冲突电子格栅的建立方法可以有效避免无人机A与无人机B相撞。
3 结 语
无人机产业发展迅猛,人们对无人机的接受程度越来越高,但由于无人机操纵者没有经过严格的培训,加之我国尚未出台针对无人机飞行的管理制度,目前无人机给人们的生活带来了诸多风险。本文采用目前较成熟的GPS技术并结合民航多年的运行经验,初步建立了一套无人机防冲突电子格栅,并通过仿真模拟验证了其可有效避免无人机与移动目标物相撞,同时无人机也可获得相对多的飞行空域。但本文只对无人机防冲突进行了研究,并未涉及无人机闯入电子格栅后应采取什么方法进行避让,这方面还需要进一步的探索。一旦无人机冲突问题和避让问题得到彻底解决,相信未来无人机将会给人们的生活带来更多的便利。
