室外多变光照条件下农田绿色作物的图像分割方法
2018-10-09尹来武郭鑫鑫
王 雪, 尹来武, 郭鑫鑫
(吉林农业科技学院 网络信息中心, 吉林 吉林 132101)
基于机器视觉技术的农业自动导航系统进行作业时, 首先要对采集到的田间图像进行目标与背景的分割, 提取图像中的关键信息进而完成路径导航、 农作物及杂草识别[1-2]等过程. 因此, 在农田室外自然环境下, 如何实现绿色作物与土壤背景的快速精准分割是实现农业机器视觉技术的关键.
颜色是人眼识别物体的重要特征之一, 通常情况下, 农田作物均呈绿色, 而农田土壤颜色呈黄褐色或黑色等, 并且对光照变化不敏感, 计算简单, 更符合实时操作的要求. 因此, 利用作物与土壤背景的颜色特征进行农田图像分割是目前应用较广的方法之一. 其中被广泛采用的颜色指数包括ExG[3],ExR[4],CIVE[5]和EXG-EXR[6]等. 此外, 利用G和R分量的NDI指标也被广泛应用[7-8]. 在图像分割算法中, 主要有阈值分割算法[9-10]、 聚类分割算法[11-12]和边缘分割算法[13]. 张志斌等[14]研究表明, RGB颜色空间中作物存在绿色“恒量”的特征, 认为作物的颜色特征为G>R且G>B, 因此提出了一种基于作物绿色特征提取垄行的分割方法, 是一种简单有效的绿色作物分割方法, 对作物和土壤、 光照变化不敏感, 但该方法对阴影部分分割不理想; 张春龙[15]采用G-R>Tr且G-B>Tb的方法进行田间背景图像分割, 该方法需要根据不同光照情况手动调节阈值Tr和Tb, 难以满足对光照变化鲁棒性和稳定性的要求. 因此, 基于机器视觉的农田作业目标信息的获取, 对图像目标识别的准确度和实时性要求较高, 本文结合绿色作物在RGB颜色空间各分量的分布特点, 提出一种基于G-R分量特征, 结合Otsu和面积阈值法的绿色作物快速分割方法. 实验结果表明, 该方法不仅可消除图像阴影及部分绿色杂草的影响, 而且计算简单, 具有较好的鲁棒性和稳定性.
1 图像采集与分析
考虑到自然环境下, 农田彩色图像的复杂性, 因此本文采集了包含不同光照条件及土壤背景的农田绿色作物图像作为研究对象, 图像分辨率为480×640, 图像格式为.jpg. 随机选取如图1所示的3幅典型不同光照条件及土壤背景的自然环境下玉米苗期图像. 在RGB颜色空间, 各图像中绿色作物和土壤背景R,G,B3个分量的均值统计结果列于表1.
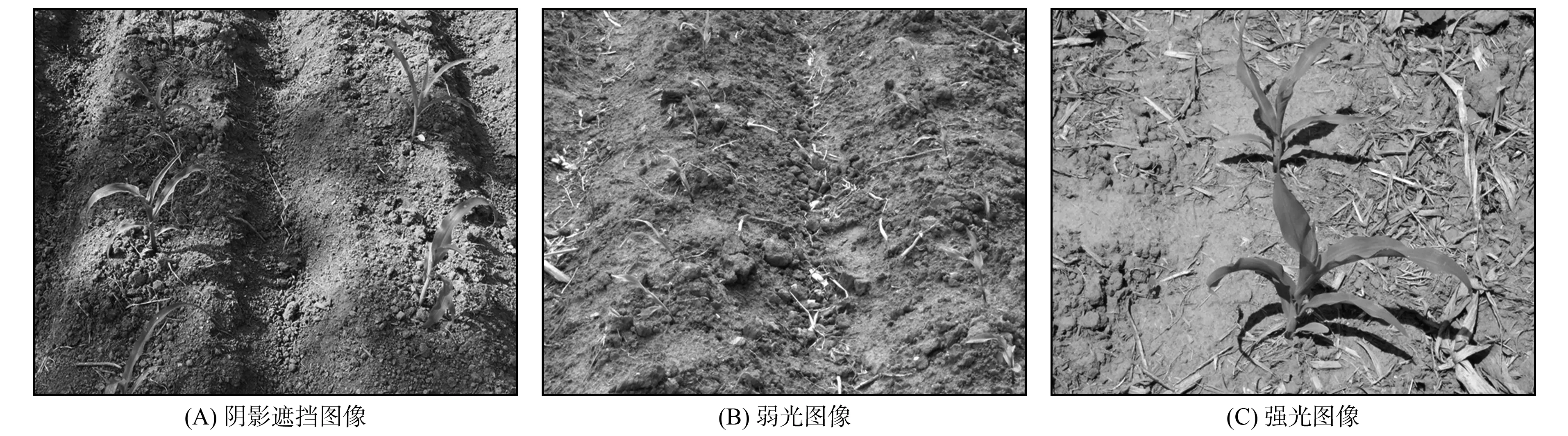
图1 自然环境下采集的玉米苗期图像Fig.1 Images of seedling stage of corn collected in natural environment
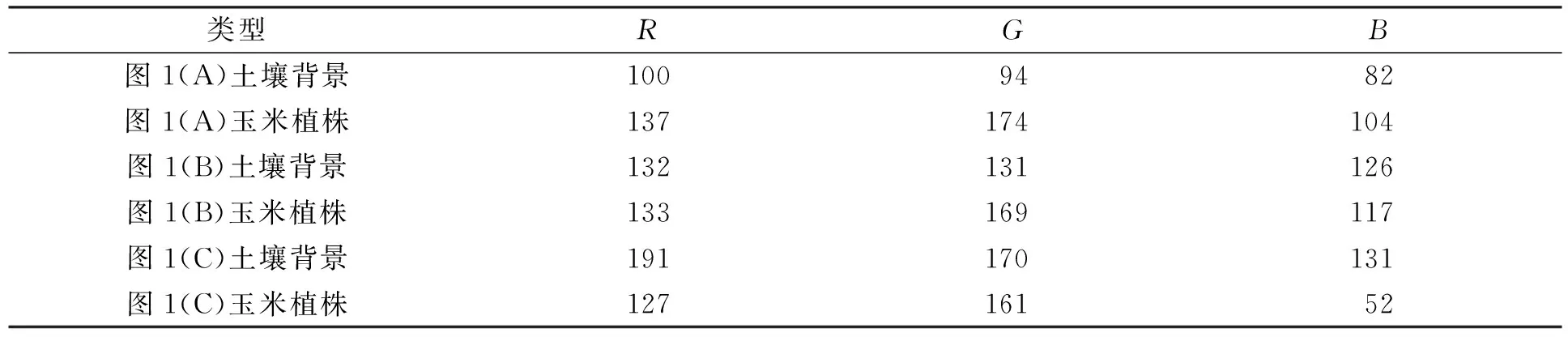
类型RGB图1(A)土壤背景1009482图1(A)玉米植株137174104图1(B)土壤背景132131126图1(B)玉米植株133169117图1(C)土壤背景191170131图1(C)玉米植株12716152
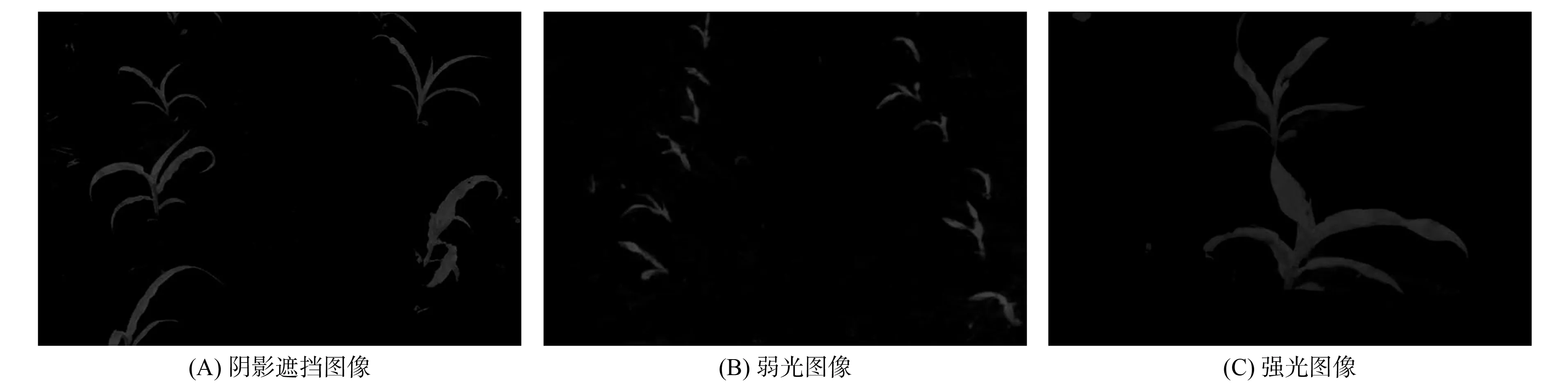
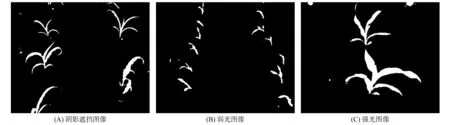
由表1可见, 对于阴影遮挡、 光线强弱等光照条件变化以及土壤背景中含有残茬等环境, 玉米植株像素中的均值关系为G>R且G>B; 土壤背景像素中, 随着光照条件的变化, 具有一定的波动性, 总体均值关系为R>G>B, 但受局部阴影影响, 存在G>R和G 根据上述分析, 本文提出一种基于室外多变光照条件下农田绿色作物的快速分割方法, 步骤如下: 1) 采用加权法提取G-R分量特征对彩色图像进行灰度化, 消除光照变化及土壤背景环境对绿色作物信息提取的干扰; 2) 采用中值滤波法对灰度图像进行去噪预处理, 减少噪声点对图像后续分割精度的影响; 3) 采用Otsu算法进行自动阈值分割, 得到初步二值图像; 4) 对二值图像进行膨胀腐蚀后续处理, 求取八连通区域, 利用面积阈值法过滤绿色小面积杂草等假目标. 2.1 灰度化 根据农田绿色作物在室外光照条件变化情况下的颜色特征, 采用加权法灰度化图像, 计算公式为 Gray(x,y)=W1R(x,y)+W2G(x,y)+W3B(x,y), (1) 其中: Gray(x,y)表示像素点(x,y)的灰度值;W1,W2,W3表示各分量系数; 本文取W1=-1,W2=1,W3=0, 即 Gray(x,y)=G(x,y)-R(x,y). (2) 利用 (3) 对图像进行灰度化, 所得灰度图像如图3所示. 图3 G-R模型下的灰度图像Fig.3 Gray images in G-R model 2.2 图像去噪预处理 图像信息在采集过程中受自然环境及采集方式等影响, 通常存在各种噪声的干扰, 对后期图像的分割和分析有一定的影响. 常用的去噪处理有频域和空域两种方法. 本文采用计算量小、 处理速度较快的空域法. 中值滤波是一种能有效抑制噪声的非线性滤波, 对于一些随机噪声及椒盐噪声具有理想的降噪能力, 其表达式为 g(x,y)=med{f(x-k,y-l),k,l∈W}, (4) 其中:f(x,y)和g(x,y)分别为输入图像和输出图像;W为二维模板, 本文选取3×3模板进行去噪. (5) 图4 Otsu法图像二值化结果Fig.4 Binarization results of images of Otsu method 2.4 基于面积阈值法的图像分割 初步二值化分割后的图像结果受农田绿色杂草的影响, 通常包含绿色杂草等假目标, 通过对二值图像进一步观察发现, 这些假目标分布杂乱、 无规律, 且连通区域面积较小. 本文根据二值图像中绿色作物与绿色杂草在八连通区域面积上的差异性, 选取合适的面积阈值(本文取50)进行分割[17]得到最终分割结果. 图5为不同算法分割后的结果. 由图5可见, 受光照强度和阴影影响, EXG-Otsu算法在绿色作物目标分割上存在过分割现象; 文献[14]算法在光线较弱和阴影区域分割的效果并不理想, 存在误分的情况. 而本文分割算法取得了较好的分割效果. 实验测试环境为: CPU为Intel(R), Core(TM) i7-4558U @2.80 GHz, 2.10 GHz, 4 GB内存, 开发环境为VS 2010 VC++. 图像分割性能测试标准采用误分率即ME值[18], 该值反映了背景或前景像素被误分到前景或背景区域的百分数, 该值越小表明分割效果越好. 计算公式为 (6) 图5 不同算法分割结果的比较Fig.5 Comparison of segmentation results of different algorithms 其中:BO和FO分别为人工标记标准掩码图像中的背景与前景;BT和FT分别为分割后的背景与前景; |·|表示各部分像素点个数统计值. 为了验证本文算法在室外自然光照条件下农田绿色作物分割的有效性, 本文对采集到的40幅不同光照环境、 不同绿色作物的彩色图像进行分割实验, 统计的ME值和耗时列于表2. 由表2可见, 与其他两种算法相比, 在耗时相差较小的情况下, 本文算法在误分率ME值上更有优势. 表2 多变光照条件下绿色作物图像各算法的ME值与耗时比较 综上所述, 本文研究了室外多变光照条件下农田绿色作物图像的快速分割问题, 通过分析绿色作物在RGB颜色空间上各分量的分布规律, 提出了一种基于G-R分量特征, 结合Otsu和面积阈值法的绿色作物快速分割方法. 实验中, 选取了阴影遮挡、 弱光照、 强光照及光照不均等多幅农田绿色作物图像作为研究对象. 实验结果表明, 在误分率和耗时上, 本文方法均取得了较好的分割结果, 具有较强的适应性.2 算法设计


3 实验结果与分析


