利用RTKLIB实现GPS PPP时间比对
2018-10-09王应建朱光耀康济童谢志越
王应建,朱光耀,康济童,谢志越
(1.61365部队,天津 300140;2.31668部队,甘肃 天水 810000)
0 引 言
远程高精度时间传递是实现异地综合原子时计算的基础,其时间比对精度直接影响综合原子时的频率稳定度。目前,原子钟的频率准确度和日稳定度已经达到了10-13和10-15量级,要求原子钟时间比对精度达到纳秒甚至亚纳秒量级。目前,参与国际权度局(BIPM)国际原子时(TAI)加权计算的守时实验室70多个,总计约500台原子钟[1]。典型的时间比对手段包括卫星双向时间比对[2]和GPS时间传递,其中GPS时间传递包括GPS共视[3](GPS CV)、GPS全视[4](GPS AV)和GPS PPP[5]。GPS PPP作为一种新兴的高精度时间传递方法,于2006年通过了CCTF(Consultative Committee for Time and Frequency)一项关于“GPS CP应用于TAI时间频率传递”的建议。同时,BIPM和IGS展开了一系列试验计划[8]。近年来,国际上许多守时实验室逐渐采用GPS双频接收机,替代GPS CV进行GPS PPP时间传递,其综合性能逐步逼近、甚至长期稳定度方面更加优越于卫星双向时间比对技术,具有操作性强、比对链路校准便捷、价格优惠等优势,在所有时间传递链路中约占50%.
目前,国内外开源成熟的GPS PPP软件相对较少,且大部分侧重于导航定位功能,时间传递模块相对较少。为此,本文利用RTKLIB软件实现GPS PPP时间传递。
1 GPS PPP时间传递
GPS PPP时间传递一般采用精密单点定位(PPP)算法,常用的PPP观测模型包括无电离层组合模型、UofC模型和非组合模型。本文采用无电离层组合观测方程,其数学模型如下:
(1)
(2)
cdtj),
(3)
(4)
由式(3)和式(4),可采用卡尔曼滤波或序贯平差进行解算。计算出的接收机钟差dti即为接收机时钟与参考时间基准Ref的时差。因此,分处两地的守时实验室的时间传递结果为:
δt1,2=dt1-dt2=(t1-Ref)-(t2-Ref).
(5)
2 RTKLIB
目前,国际上有关GPS PPP的开源软件包括RTKLIB,GPSTK和gLab等。此外, 部分研究机构也提供了在线PPP解算功能,例如CSRS-PPP、GAPS、APPS和magicGNSS。这些软件主要侧重于导航定位,暂时没有提供时间传递方面的功能。考虑到导航定位解算与时间传递在很多方面的共同性,因此在已有的开源软件资源基础上,进行二次开发专业时频传递功能。RTKLIB是由日本东京海洋大学开发的GNSS导航定位软件,支持多种实时和事后GNSS导航定位功能,提供了丰富的数据输入输出接口,例如RINEX 2、RNIEX 3、RTCM 2、RTCM 3、IONEX等,同时支持目前市场上多种常见的GNSS接收机数据格式。
RTKLIB提供了SPP、PPP、RTK等多种典型的GNSS应用程序实例,用户可以直接进行定位解算和数据分析。对于特殊需求用户,RTKLIB提供了丰富的基础函数库,包含了数据输入输出函数、模型改正函数、坐标系转换函数、RTK服务器函数等。用户可以根据专业需求,进行便捷的二次开发,丰富和补充软件功能。
3 实验验证
为了分析RTKLIB的GPS PPP时间传递的精度和稳定度,以4个IGS站BRUX、IENG、OPMT和PTBB的观测数据为例进行时间传递,测站具体信息如表1所示。
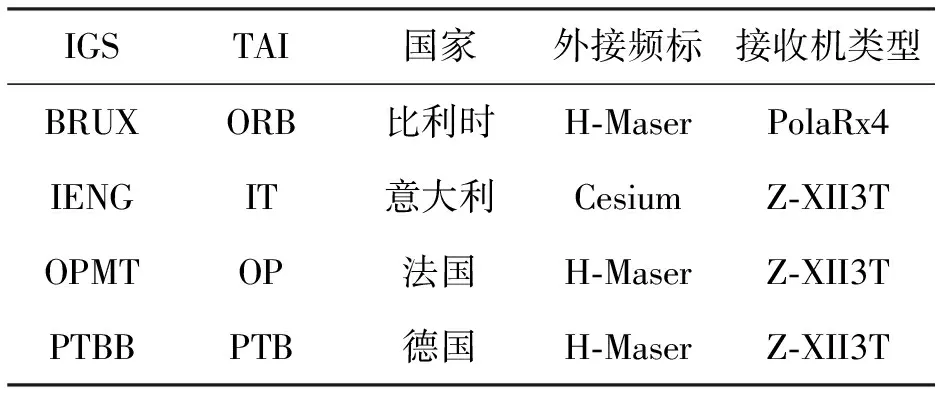
表1 TAI和IGS并置站信息
下载了2017-08-07至2017-08-21共15天的观测数据,星历数据采用了IGR星历和钟差数据,用于比对分析的钟差数据采用IGS最终钟差文件。图1虚线所示为4个IGS站利用RTKLIB进行GPS PPP时间比对的结果。实线表示IGS最终钟差文件的时间比对结果。
从图1可以看出,BRUX-PTBB、IENG-PTBB、OPMT-PTBB的解算结果与IGS最终钟差基本保持一致,尤其是BRUX-PTBB、IENG-PTBB.然而,OPMT-PTBB部分时间存在较大跳变,这主要是因为OPMT测站缺少2017-08-16和2017-08-19两天的观测数据,导致重新解算需要一定的收敛时间,实际上,经收敛后其解算结果基本与IGS最终钟差吻合。
为进一步统计分析RTKLIB时间比对结果的精度,以IGS最终钟差为参考值计算三条链路的时间比对残差,其中OPMT-PTBB仅统计收敛后的结果,如图2所示。
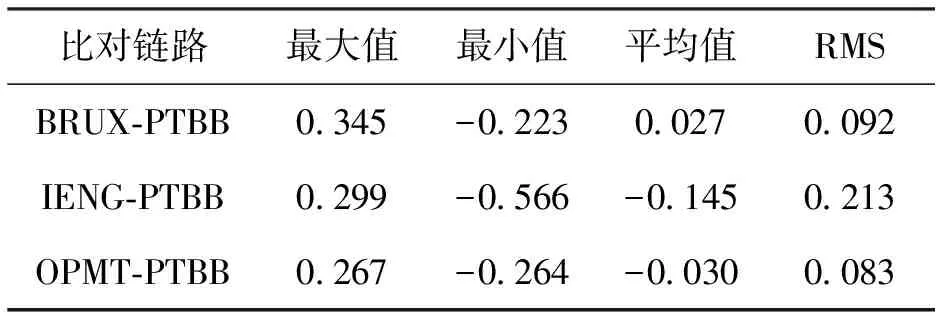
表2 比对链路的精度统计结果 ns
从图2和表2可以看出,三条比对链路的估计钟差的绝对残差约-0.6~0.4 ns,RMS约0.1~0.2 ns,平均值约-0.15~0.05 ns.因此,RTKLIB的时间比对结果与IGS最终钟差具有较好的一致性。
进一步分析RTKLIB时间传递的频率稳定度,由于OPMT测站丢失了两天的观测数据,仅计算了BRUX-PTBB和IENG-PTBB的Allan方差,如图3所示。
从图3可以看出,利用RTKLIB进行时间传递,其天频率稳定度可以达到1.5×10-15~2.5×10-15,与当前BIPM守时实验室GPS PPP时间比对的稳定度相当。
4 结束语
针对目前开源成熟的GPS PPP软件较少,且大多侧重于导航定位功能,时间传递的模块较少。简要介绍了GPS PPP时间传递的基本原题,利用RTKLIB进行高精度远程时间传递,以IGS最终钟差产品为参考分析了RTKLIB时间传递的性能,其绝对残差约-0.6~0.4 ns,RMS约0.1~0.2 ns,天稳定度达到了1.5×10-15~2.5×10-15.后期,将利用RTKLIB软件开源的优势,进一步拓展在高精度时频传递方面的应用。