国外有人直升机与无人机协同研究综述
2018-10-09罗雪丰雷咏春
罗雪丰,雷咏春,范 俊
(1.中国直升机设计研究所,江西 景德镇 333001;2.陆军航空兵研究所,北京 101121)
0 引言
随着空战武器和地面防空系统的飞速发展,直升机战场生存环境愈加恶劣。近年来美军直升机装备在索马里战争、伊拉克战争、阿富汗战争中,以及俄罗斯直升机装备在叙利亚战争中频频被敌方采用伏击战术击毁。为解决伏击杀伤带来的装备毁伤与飞行员生存问题,以美国为代表的军事强国,一方面通过技术更新换代提升直升机性能,如升级传感器和武器[1],发展高速直升机[2]等;另一方面创新作战样式,在装备无人化大背景下逐步发展有人直升机/无人机协同作战能力[3]。
有人/无人协同组合思想最早出现于20世纪60年代后期,有人直升机/无人机协同作战是这一思想在直升机装备领域的延续:主要利用无人机不怕牺牲、廉价等优点,在有人直升机的指挥控制下,前出 “危险、脏、累、枯燥”环境下执行侦察、打击等作战任务。有人直升机/无人机协同既解决了有人直升机装备作战易被伏击杀伤的问题,同时将两种作战平台融为一体最大化提升了体系化作战效能。
文中对国外有人直升机与无人机协同研究的总体情况、详细发展历程进行了介绍。此外,有人直升机与无人机协同中的首要问题是如何有效降低有人直升机上无人机指控员的工作负荷,对于相关的人机工效优化、数据融合与辅助决策技术等专项研究,以及协同后的效能评估研究进行了综合论述。
1 总体情况
通过公开资料调研统计的国外有人直升机/无人机协同研究项目占比分布情况如图1所示,美国占据绝对主导地位。其中美国陆军对于有人直升机/无人机协同作战研究占比最大;德国和法国各开展了1项演示验证项目。
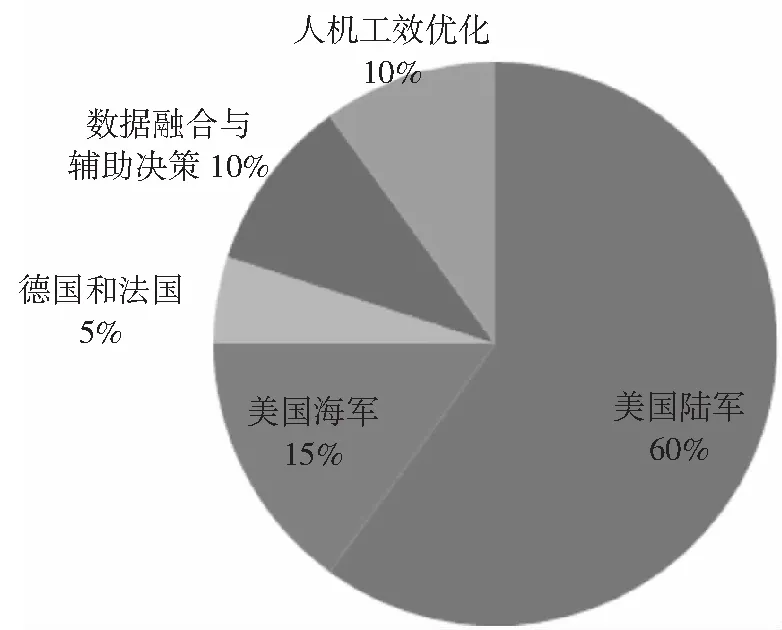
图1 国外有人直升机/无人机协同总体情况
在降低飞行员指挥控制无人机的工作负荷研究方面,主要包括两方面的专题研究:人机工效优化、数据融合与辅助决策。其中人机工效方面德国慕尼黑大学开展了1项模拟器评估与1项飞行仿真试验;其余研究均为美国相关机构完成。
2 美国陆军有人直升机/无人机协同研究历程
美陆军有人直升机/无人机协同研究可分为三个阶段:概念研究与演示验证阶段,主要完成概念研究、需求分析、效能仿真与评估、关键技术与协同作战样式演示验证;工程研发阶段,研制可批量列装美陆军现役直升机装备的协同控制组件;服役与战法演训阶段,完成部队编组与战术战法训练。
2.1 概念研究与演示验证阶段
由于处于起步阶段,美陆军内部对于发展有人直升机/无人机协同新型作战样式经历了长期的争辩质疑,然后通过仿真与试飞演示证明效能提升的迭代发展过程。
美陆军概念研究与演示验证阶段项目的发展历程如图2所示。
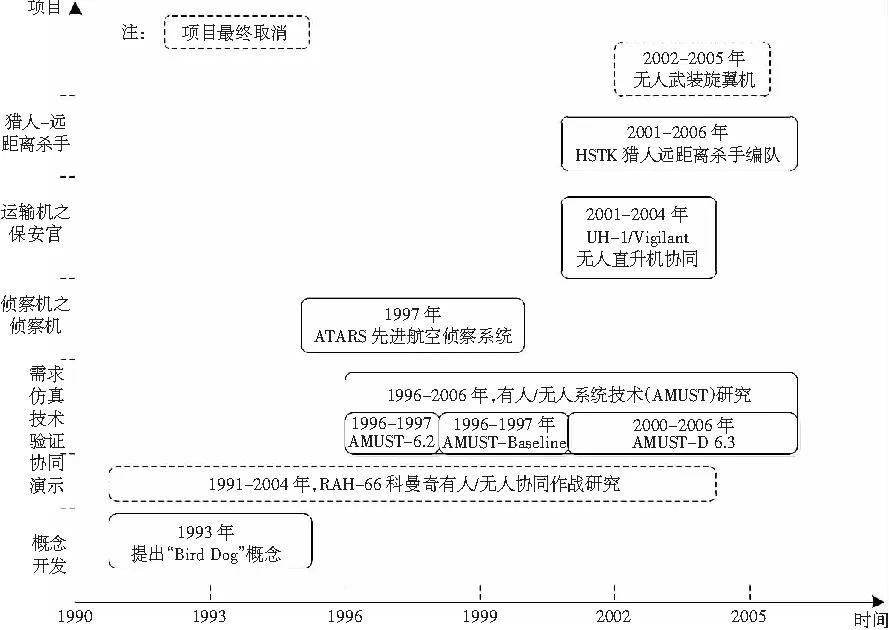
图2 美陆军概念研究与演示验证阶段项目发展历程
2.1.1 概念研讨
1993年,为了有效解决陆军航空兵直升机在战场上不断发生伤亡事故的问题,提高陆军航空兵的任务能力和生存能力,美国空中机动作战实验室提出了“基于编队的有人无人航空平台系统能力”先进概念,并命名为“Bird Dog(捕鸟猎犬)[4]”,意指由无人机充当猎人(即有人直升机)的“捕鸟猎犬”深入危险或隐蔽区域执行侦察或打击任务。
与此同时,美军“科曼奇”直升机研制项目正稳步推进,期间美军内部对于无人机能否完全取代“科曼奇”的作战角色的争论非常激烈[5]。通过对两种平台在执行侦察任务中的生存力、杀伤力、反应力三个维度的效能和效率对比得出结论:“军方需要集成两种作战平台的优势,有人直升机/无人机协同编队是陆军航空兵未来发展的正确方向”。
2.1.2 协同作战样式演示验证
1996年,美国陆军航空应用技术处与波音公司启动了“机载有人/无人系统技术[4]”研究,项目分三个阶段开展:第一个阶段完成了有人机/无人机协同功能需求定义、关键技术识别、效能仿真评估;第二个阶段开展了“‘猎人’无人机侦察视频图像回传‘阿帕奇’武装直升机,‘阿帕奇’武装直升机操控‘猎人’无人机传感器”的协同能力演示验证;第三阶段针对陆军航空兵空中突击典型编组进行了“猎人无人侦察机、‘阿帕奇’武装直升机和‘黑鹰’指挥直升机”协同作战中互联互通能力演示验证,确保战场指挥官能够对不同类型的空中作战编队进行指挥,并对无人机进行控制和指挥。
随着“有人直升机/无人机”协同作战概念的推广,贝尔直升机公司于1997年自筹资金开展了“先进航空侦察系统[6]”研究,旨在用无人侦察机(命名“Remote bold eagle(远方白头雕)”)拓展有人侦察直升机对动态变化战场态势或者数量占优的敌军、以及恶劣气象条件下的侦察能力,执行导引、探雷、远程激光指示、数据收集、目标探测、专用武器发射等任务。2001年,美国陆军航空应用技术处组织了“军用小型垂直起降无人机测试集成项目[7]”研究,由UH-1有人直升机与“Vigilant(保安官)”无人直升机组成演示验证系统,完成“运输直升机之保安官”概念研究。2002年,美国国防高级研究项目署DARPA联合诺·格公司、洛·马公司研究和开发代替有人驾驶侦察直升机与有人武装直升机作战编队的有人直升机与无人武装直升机组成的空中机动编队[8],项目由于航空器自主性和协作能力以及项目定位方面的问题于2005年取消。2001年开展的“猎人远距杀伤编队[9]”先进概念技术验证项目是机载有人/无人系统技术的延伸,并对武装直升机认知决策辅助和目标精确瞄准技术展开了深入研究。
2.2 工程研发阶段
美陆军技术开发阶段项目的发展历程如图3所示。
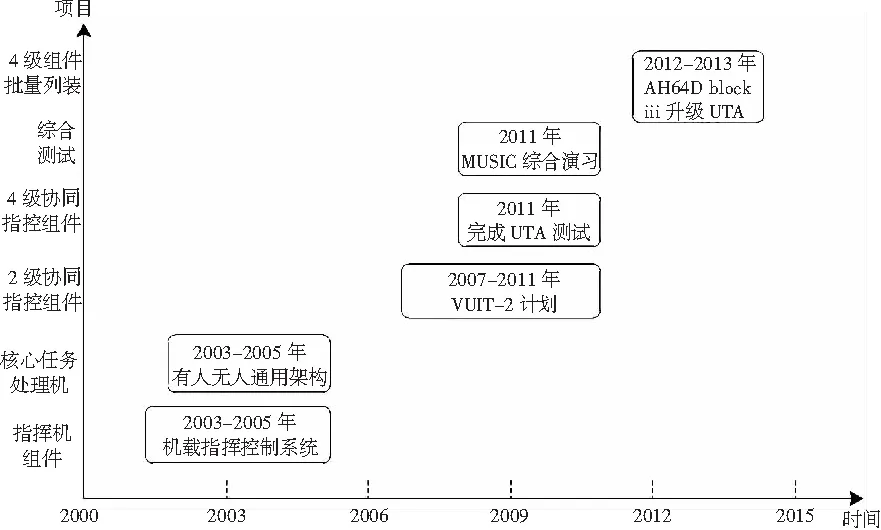
图3 美陆军技术开发阶段项目发展历程
为使“黑鹰”指挥直升机具备与无人机协同的能力,美军在20世纪90年代直升机驾驶员助手技术的基础上开发了移动指挥官助手系统[10],嵌入原机配装的陆军机载指挥和控制系统,实现了无人机4级互操作控制能力。而此时的现役武装直升机航电体系架构技术状态差别太大,直接影响到多平台联合作战的协同能力以及对无人机的互操作能力。同时,为了降低后续协同能力改型升级的成本,美国陆军航空应用技术管理局在CAAS、ROSA等航电架构研究的基础上,提出了有人直升机/无人机通用架构计划[11],旨在开发一种开放式航空电子系统架构和处理器结构,使其能根据任务需求,通过模块化即插即用方式实现快速升级或者功能扩展。
2006年,“机载有人/无人系统技术”与“猎人远距杀伤编队”项目结束后,美国陆军以这两项研究取得的成果为基础,开始发展一种更接近实用化的系统,包括为现役“阿帕奇”AH-64D Block I、II开发2级控制能力[12]的协同指控改装套件。2011年,进一步升级数据链组件和指控系统之后开发了4级指控能力的组件[13],配装此协同指控组件的“阿帕奇”直升机升级到Block III状态。同年9月,为了验证未来多平台联网作战的设想以及各作战平台之间的互操作和互联能力,美国陆军航空项目执行办公室发起了规模最大的有人无人系统综合能力演示验证项目[14]。演习结果表明,混合编组后协同作战使得有人直升机和无人机平台的作战能力都得到了提升。
2.3 服役与战法演训阶段
美陆军部队应用阶段项目发展历程如图4所示。
2014 年8 月,美陆军航空计划执行办公室在阿拉巴马州的红石兵工厂和加利福尼亚州的飞行测试中心成功完成了AH-64E“阿帕奇”武装直升机同时控制“灰鹰”无人机和“影子”无人机执行任务的测试[15]。与此同时,美陆军发布了2025年部队未来发展路线规划[16],随着OH-58D“基奥瓦”武装侦察直升机的逐步退役,美国陆军已决定组建有人直升机/无人机混编陆航营:为现役师属战斗航空旅的攻击直升机营编配24架AH-64E直升机和1个“灰鹰”远程多功能无人机系统连;为重型攻击侦察营编配24架AH-64E直升机和3个“影子”200无人机系统排。首个重型攻击侦察营于2015年发布陆军航空重组计划之后组建完毕。
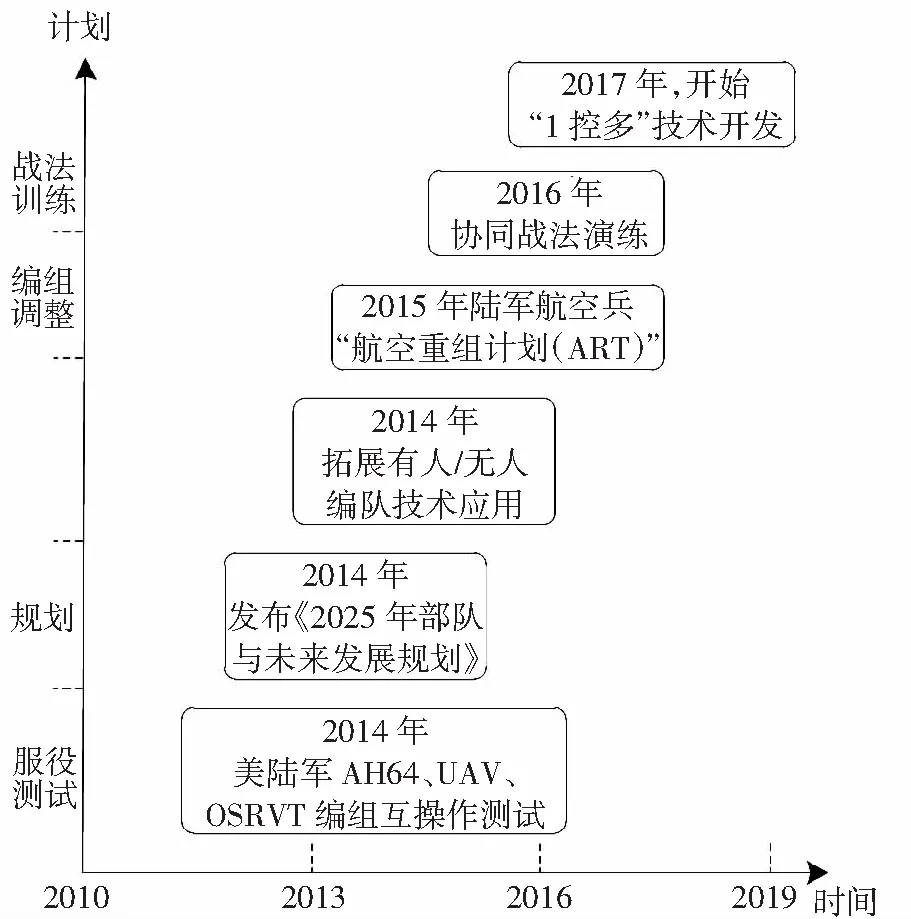
图4 美陆军部队应用阶段项目发展历程
2016年10月,美陆军第82空中战斗旅第1侦搜攻击营的AH-64D武装直升机与第三旅级战斗队侦察排的“影子”无人机首次进行贴地飞行协同战法演练[17]。随着AH-64E直升机4级协同作战能力的成功服役,陆军希望将技术推广到其他的无人航空系统,并且让“黑鹰”或“支奴干”直升机上的士兵能够使用协同终端设备远程实时接收执行任务所需的情报数据,这样步兵在其到达着陆区域之前就能够对作战地形有所了解。
3 美国海军有人直升机/无人机协同的研究历程
美国海军从20世纪90年代初开始研究有人机/无人机协同应用技术,其中直升机与固定翼机种类别协同各占一半。美海军有人/无人协同项目的发展历程如图5所示。
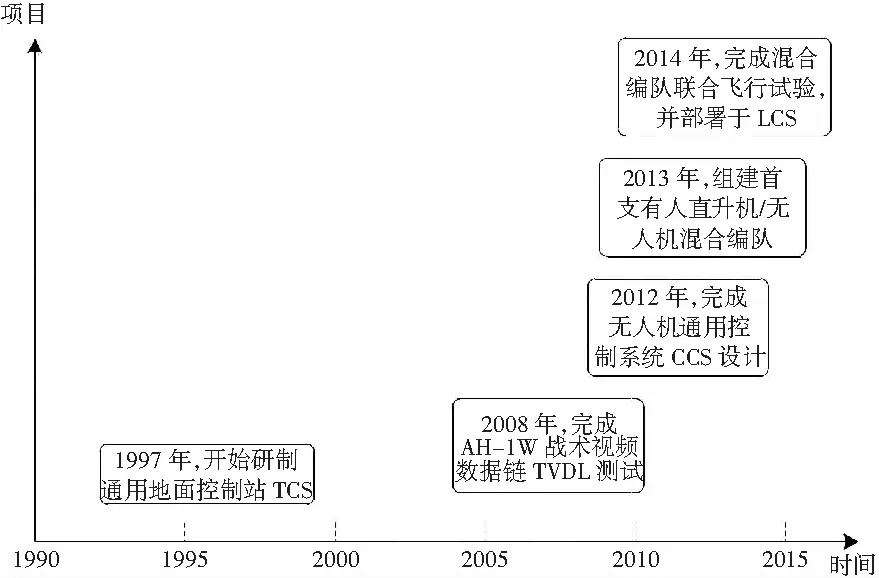
图5 美海军有人/无人协同项目发展历程
3.1 通用控制站与协同链开发
1997年,美国开展战术控制系统研制计划,以解决美军联合需求监督委员会提出的需求——研制通用型地面接收、处理与控制系统,以确保“捕食者”大型无人机、“先驱者”小型无人机以及未来战术无人机的数据收集系统间互通。原计划统一海陆空三军的无人机控制站,后因推广难度,主要应用于海军。2003年,美海军一架搭载战术控制系统的P-3C飞机演示了对一架“火力侦察兵”无人直升机的5级控制,包括发射、控制和回收[18]。
2008年,美国海军完成了AH-1W攻击直升机配装以色列Elbit公司设计的战术视频数据链[8],并演示了从无人机接收视频和目标数据,并将这些数据转发至其他飞机或地面站的协同作战能力。
3.2 服役测试与部署
2012年,美海军提出无人机通用控制系统架构[18],旨在实现有人机、地面部队、航母等有人平台对“火力侦察兵”无人直升机、下一代无人隐身战斗机等无人机的分布式通用化协同互操作。2013年,美国海军组建了由8架“海鹰”直升机和10架“火力侦察兵”无人侦察机组成的混合编队[14],搭载于海军新型濒海战斗舰。2014年5月,美国海军在“自由”号濒海战斗舰上成功完成“火力侦察兵”无人直升机与“海鹰”直升机联合飞行试验。试验结果表明:“火力侦察兵”装载的战术合成孔径雷达可在恶劣环境(如灰尘、烟雾、遮挡物)条件下对战场进行高分辨率实时成像,探测活动目标,具有覆盖战场全域的全时作战能力,并可以持续地向“海鹰”直升机飞行员和濒海战斗舰操作人员提供战场环境的关键信息,提供精确瞄准能力保障,确保其免受海上威胁。
2014年11月,第35直升机海上打击中队1架“海鹰”直升机和1架“火力侦察兵”无人直升机开始部署在西太平洋上的滨海战斗舰上,后者将提供对于“海鹰”直升机航程和续航时间的拓展从而增强其海上态势感知能力。该混合协同编队成为该濒海战斗舰对面作战、反潜作战和反水雷任务包的关键构成部分。
4 德国和法国有人直升机/无人机协同的研究情况
2012年,德国陆军航空战斗发展部与ESG公司联合开展了有人直升机/无人机协同研究项目[19]。项目搭建了半物理仿真平台,让陆军飞行员评估了“虎”式攻击直升机座舱内控制无人机以及运输直升机上的专用控制站控制无人机的效果,得到结论:有人直升机/无人机协同能显著降低飞行员和乘员的风险,增强飞行编队内所有成员的态势感知能力,降低工作负荷,保护有价值系统。该项目还使用UH-1D运输直升机和一架无人直升机开展了试飞演示(见图6)。

图6 德国协同研究项目试飞演示使用的
2014年4月,法国空客直升机公司的H145运输直升机与Schiebel公司的S-100无人直升机完成了协同作战飞行试验[20]。此次试飞中达到了5级协同控制等级,S-100无人直升机由H145直升机后舱的操作手操控飞行,演示场景包括对常规直升机无法发现的隐蔽物体的识别,以及无人机的操作短时转移到地面控制站控制的权限交接,以模拟有人直升机返回地面加油补给。
5 有人直升机/无人机协同支撑课题专项研究
有人直升机/无人机协同首先需要解决有人直升机上无人机指控员的工作负荷问题,涉及到协同人因评估与工效优化研究、态势数据融合与辅助决策技术开发两个方面。此外,还包括协同后的效能评估与验证研究。这些问题以专项形式另由高校等科研机构完成以支撑有人直升机/无人机协同作战的发展。
5.1 人因评估与工效优化
2006年的综合人因评估研究[8]中,美国航空气动力学协会联合美国军方航空与导弹研究研制中心等4家单位开展仿真试验,评估有人直升机/无人机编队的人机工效和负荷。试验中邀请了7名飞行员测试了24种任务条件下控制2架无人机并接收其数据的精准度和反应时间、目标识别数量、传感器效能和传感器有效性。试验记录了飞行员负荷度和生理状态,并对飞行员进行了采访。在“1控1”条件下对无人机控制界面进行了主观评分和客观数据记录;对于“1控2”或“1控多”条件下执行任务的评估结论则认为需要改进现有的驾驶舱及显示界面设计。
2008年2月开始,美国军事学院人因工程系开展了配装2级协同指控能力组件的“阿帕奇”武装直升机/无人机混合编队的飞行员负荷评估[21],主要目的是利用模拟器评估“阿帕奇”直升机机组在执行任务条件下(2级控制等级)接收视频时的操作负荷。分析和收集了参与测试的8名飞行员的负荷、态势感知、机组协调、指控站接口、传感器源切换、飞行员生理状态(如凝视时间、头眼注视、音视频显示、战术/技术/操作程序等)数据。此外,还聘请了专家观察每一项任务下的飞行员负荷、机组态势感知状态、机组协调和任务成功度。飞行员反馈执行任务期间负荷可接受,在执行任务期间具备中等水平的态势感知能力;对无人机传感器的操控虽然增加了其负担,但其带来的态势感知能力减轻了探测目标和开火时的负担,缩减了整体交战时间。对于无人机指挥控制界面,大多数飞行员的反馈是可用,但需要优化提升整体使用效能。
2011年,美国航空气动力学协会利用“阿帕奇”武装直升机仿真模拟器研究驾驶舱无人机授权控制的效能。测试了3种无人机控制方式(4级控制等级):无人机按照规划航线自动飞行、人工航路点编辑飞行控制、手动操控无人机飞行。试验结果表明,航线自动飞行显著减轻了飞行员负荷,增加了执行主要任务的效能。
2011-2013年,德国慕尼黑德国国防大学飞行系统学院航空工程系利用直升机任务模拟器进行综合评估[8]。邀请试验人员在试验原型上进行了飞行员控制多架战斗无人机的人在环路仿真测试,试验未收集数据。
5.2 数据融合与辅助决策
美国早在1986-1996年间开展了持续的理论基础研究—“基于认知理论的有人无人协同技术[22]”:以认知理论为指导,设计指控操作界面和人机相适应的交互架构,研究无人机操作员辅助系统模型以及多无人机任务管理仿真评估。
针对“阿帕奇”武装直升机研发的战斗助手辅助软件[9]旨在通过提高机组人员的态势感知能力来增强有人直升机的生存能力。战斗助手软件主要处理操作量密集的任务,使驾驶员集中于作战规划和战术运用之类的高层次任务上,包括下列子模块:航路规划与评估、传感器覆盖与监视、数据融合、无人机控制、火力攻击。
为“黑鹰”指挥直升机无人机协同作战而开发的移动指挥官助手辅助软件[10]通过对机内外多源传感器信息的综合处理,生成统一战场态势,根据相关的作战规则完成在线任务规划,并发出提示,辅助驾驶员高效完成任务。其关键在于有人直升机上无人机操作人员的决策支援、数据融合和智能数据挖掘,以及控制和显示子系统。
为地面单兵终端OSRVT地面站开发的“FUSE数据融合系统”采用了多信息源传感器数据融合技术,通过软硬件设备融合了大量信息源(如地面移动目标指示器数据、光电传感器、红外传感器和合成孔径雷达信号),并将这些信息显示在同一张地图上,从而有效地利用了无人系统的传感器信息。其关键技术包括多源信息融合、分布式处理、智能数据共享、无人机通用地面站及无人机与其他系统间的协同操作等。
5.3 效能评估与验证
美国开展的效能评估的项目主要有两个:“机载有人/无人系统技术”和“RAH-66‘科曼奇’有人/无人机能力开发”,两个项目都开展试飞演示对比评估,其中机载有人/无人系统技术项目还开展了前期的仿真试验评估。
机载有人/无人系统技术仿真效能评估得到的结论是[4]:
1) 在不影响侦察效果的前提下,执行战术侦察任务的时间平均缩短了10%;
2) 识别目标的数据量增加了15%;
3) 传输给指挥官的关键信息量增加了30%;
4) 报告的高价值目标数据量增加了20%;
5) 机载人员生存性增加25%以上;
6) 武器系统杀伤力增加50%以上。
美国空中机动作战实验室的有人/无人协同作战能力评估的结论是[5]:
1) 完成战术侦察任务所需的时间缩短了10%;
2) 识别和上报高价值目标的数量增加了15%;
3) 提供给指挥官的关键信息量增加了30%。
机载有人/无人系统技术和RAH-66有人无人协同能力开发项目中进行的演示试飞对比评估结论均表明:有人/无人混合协同编队增加了机组的态势感知能力,态势辅助软件能有效降低机组的实际管理负荷。
6 结束语
美军长达二十余年的研究和实践应用已经证明发展有人直升机/无人机混合协同作战能力是解决直升机装备作战目前所面临问题的有效途径之一。同时美军的实践经验表明:有人直升机/无人机协同体系庞大,技术复杂,发展有人直升机/无人机协同作战能力需要清晰的顶层概念和规划来引领系列项目的有序组织开展。