某型机电传飞控系统位移传感器总体布置设计
2018-10-09邓海侠
孙 冲,邓海侠
(中国直升机设计研究所,江西 景德镇 333001)
0 引言
位移传感器分系统是某型直升机电传飞行控制系统的重要组成部分,本文研究的传感器是电传飞控系统基本控制回路所需要的指令传感器。每个通道安装了互为备份的两个电气两余度位移传感器,两个互为余度的位移传感器,其输出特性的差异直接影响电传飞行控制系统对该通道位移传感器信号的识别和判别,差异过大会影响对位移传感器故障的辨识。因此每个通道位移传感器的总体布置应保证其输出的差异在设计要求的规定范围之内。而座舱操纵装置到每个通道两个位移传感器的输入差异直接影响位移传感器的输出,也就是说位移传感器的总体布置应保证座舱操纵装置到每个通道两个位移传感器的输入完全一致。本文以横滚通道为例,运用CATIA DMU KINEMATICS运动机构模块对座舱操纵装置建模,通过仿真,分析不同总体布置情况下的位移传感器的输入随座舱操纵装置动态输出的变化情况,总结出电传飞行控制系统位移传感器总体布置的设计方法。
1 电传飞行控制系统及位移传感器分系统
所谓电传飞行控制系统是一个“应用反馈控制原理而使飞机运动成为被控参量的电气飞行控制系统”[1]。它由机械、液压、电子、电气等部件组成,同一般的控制增稳系统一样,包括位移传感器、指令模型、测量元件及舵机回路。将驾驶员的人工操纵指令(力或位移)转化为电气信号,与来自测量直升机运动参数的反馈信号结合后进行传输,然后再将处理后的电气信号转化回机械位移来控制舵面。它用电缆替代座舱操纵装置到助力器之间的机械杆系,实现驾驶员对飞机运动进行控制的目的。框架图见图1。
驾驶指令传感器是把驾驶员对于飞机实施操纵的指令(力或位移)加以敏感,以信号形式传输给飞控计算机的传感装置,分为位移敏感型和力敏感型。本文采用的是旋转式位移敏感型指令传感器(RVDT),它们用于测量飞行员的操纵输入(俯仰、横滚、航向、总距),输出通过电缆与飞控计算机相连,信号经过处理后供控制律使用。
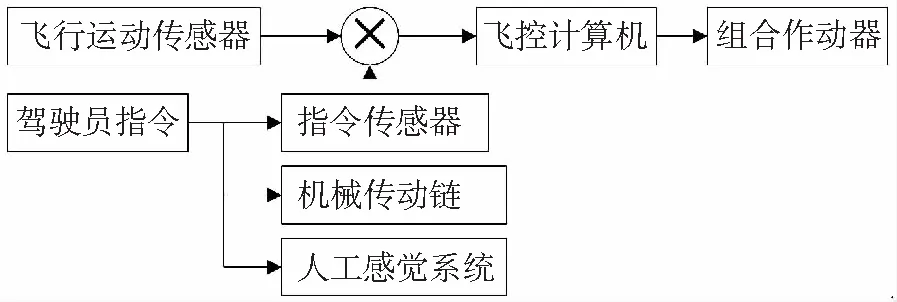
图1 电传飞控系统框架
由于在完全取消了机械操纵链的电传飞控系统中,电子电气器件所组成的单重电气信号传输系统的可靠性无法与机械操纵链相比,因而难以满足作为飞行安全关键系统的飞行控制系统的可靠性要求。所以,电传飞控系统均是以多重余度的形式设计和实现的,其各个余度之间可以认为是互为备份的存在形式。故某型机上,每个通道均布置两个电气两余度位移传感器互为备份,形成四余度传感器系统。对于多余度系统,位移传感器输出差异的大小直接影响电传飞控系统故障的判别,即飞机的安全保障,所以多余度位移传感器系统输入的一致性尤为重要,它也便成为考量位移传感器布置方案的重要因素。
2 运动机构建模
2.1 座舱操纵装置的运动仿真
座舱操纵装置的运动仿真是在数字样机的基础上,通过定义空间运动副,来建立三维运动模型,分析座舱操纵装置运动特性,为设计人员提供有效的虚拟设计手段。它通过DMU运动机构来实现,对所研究的对象进行动态模仿,对于分析飞行操纵系统具有重要意义。
对座舱操纵装置横滚通道建模,用空间的点、线、面作为最小构建单元来代表运动部件,分析其运动原理,建立空间运动副,形成运动模型。以周期变距杆的角位移作为模型的运动输入,位移传感器的输入角度作为运动输出。
2.2 位移传感器布置方案
位移传感器安装在飞行员座舱地板下,一端与机体结构相连,另一端与操纵拉杆相连。为提升直升机的战场生存性(即两台位移传感器不会同时被击中),并且保证机械传动关系的一致性,每个通道的杆位移传感器均采用左右对称布置,横滚通道也如此。对于本文采用的旋转式位移敏感型指令传感器,为了满足其精度要求,我们一般要求它的摇臂角度变化控制在±30°范围以内。因为俯仰与横滚通道均由周期变距杆操纵,所以会存在耦合,为保证各通道机械的独立性,布置位移传感器时,减小耦合也是重点考虑的因素。某型机为并列式座舱,对于横滚位移传感器的布置位置主要分析如下三种方案,其运动模型如图2-图4。其中,用直线表示座舱操纵装置横滚通道,虚线表示左右位移传感器。传感器摇臂长度固定为45mm,连接拉杆与传感器摇臂基准状态垂直。
1)两位移传感器分别从正副周期变距杆底端引出,两根长连接拉杆为400mm,左位移传感器与横向限位摇臂的连接拉杆为200mm。
2)两位移传感器均安装在从副周期变距杆底端连接的横向限位摇臂上,左右连接拉杆长度分别为200mm和400mm,副周期变距杆底端与连接位移传感器的横向限位摇臂之间的长拉杆长度为600mm。
3)两位移传感器均安装在从副周期变距杆底端连接的横向限位摇臂上,连接杆长度为200mm,副周期变距杆底端与连接位移传感器的复合摇臂之间的长拉杆长度为900mm。
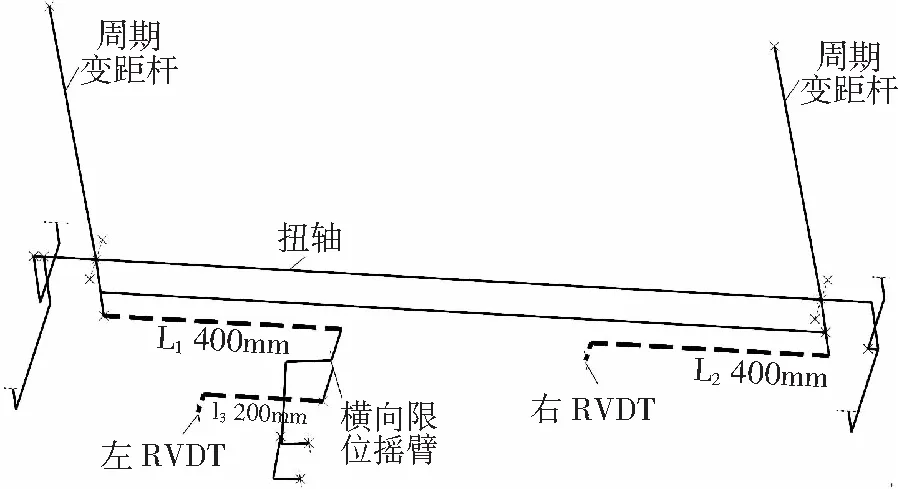
图2 方案1运动机构模型
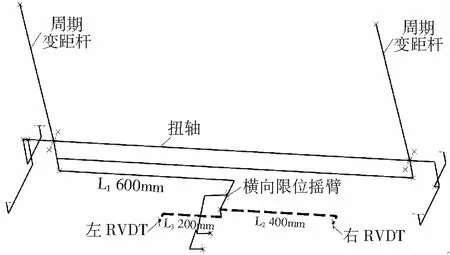
图3 方案2运动机构模型
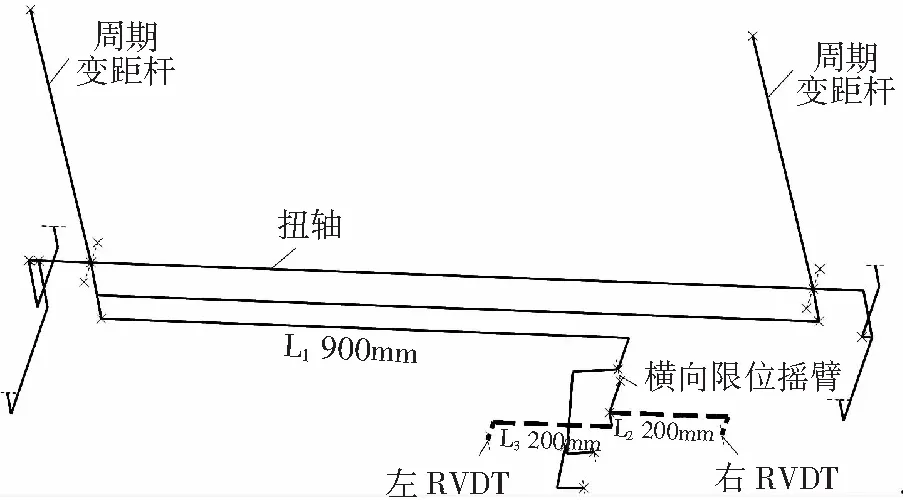
图4 方案3运动机构模型
3 仿真结果及分析
对三种不同方案的运动模型进行仿真,以周期变距杆杆位变化作为驱动(横向范围定义为±10°,纵向范围定义为±12°),观察左右两侧横向位移传感器的角度数据,得出周期变距杆纵横向杆位变化对横向位移传感器的影响曲线,如图5-图7所示。
当横向杆位变化时,位移传感器的输入一致性很好,但纵向杆位变化对位移传感器的影响较大。这是由于两位移传感器直接从操纵输出点引出,拉杆虽然长度相同,但都较短。
从横向限位摇臂引出的两位移传感器的连杆虽然长度不同,但并未影响它们的一致性。
由于从操纵输出点引出的长拉杆长度增加,两位移传感器受纵向杆位的耦合变小。
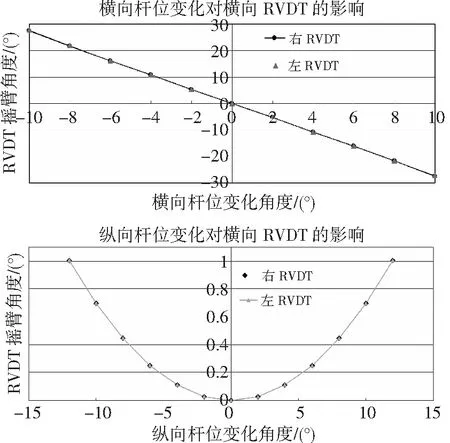
图5 方案1仿真结果
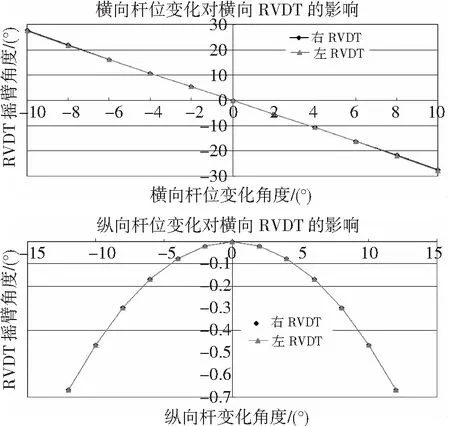
图6 方案2仿真结果
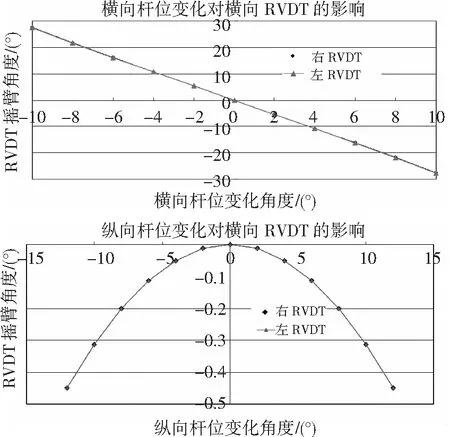
图7 方案3仿真结果
表1列出了三种方案的仿真数据,包括杆位极限状态下位移传感器的角度变化、差值及相对杆位变化所占的百分比。其中周期变距杆到左右两个横向位移传感器的传动比均为2.67°/°,三种方案的左右位移传感器输入角度均在30°以内,满足要求。其一致性都很好,相差不大。而方案3的位移传感器摇臂角度变化占纵向杆位输出的百分比小于5%,符合设计要求。

表1 仿真数据
4 结论
通过运动机构对座舱操纵装置横滚通道的建模,分析操纵系统动态特性对位移传感器输入特性的仿真数据,可得如下结论:
1)对于互为备份的多余度位移传感器系统,当机械传动关系相同时,位移传感器之间的输入基本一致,即非线性小;
2)当机械两余度的位移传感器从不是操纵输入的同一点引出时,连接拉杆的长度对其输入特性影响较小,设计优化过程中可以适度变化拉杆长度;
3)纵向通道的动态输出对两个横向位移传感器的影响受操纵输出点引出的长拉杆长度的影响,为更好地避免耦合,可适当增加长拉杆长度;
4)总距和航向通道具有独立性,不存在机械耦合,所以位移传感器的布置较简单,只需要保证一致性就可以了。
经分析比较可见,方案3可行。