反潜直升机吊放声纳缆位稳定控制需求分析
2018-10-09屈也频尹大伟
屈也频, 尹大伟
(海军研究院,上海 200436)
0 引言
反潜直升机最主要的探测手段是吊放声纳,通过绞车释放电缆将声纳换能器——水下分机放入海水中至选定的深度,主动发射声脉冲并接收目标回波实现对水下潜艇的探测。由于声波在水中水平传播的特性,吊放声纳可靠工作的前提是保持声纳水下分机基本处于垂直状态,这样才能完成有效探测。
早期的舰载反潜直升机依靠驾驶员人工保持声纳电缆位置的稳定,但在缺少参照物的茫茫大海很难长时间工作。1945年4月,美国海军首次在一架XR-6直升机上安装吊放声纳进行探潜试验。在美海岸警卫队海军中校罗斯·格莱厄姆(Stewart Ross Graham)的回忆文章《狼群和周日喜剧海报》中,记录了这次直升机探潜试验如何借助海面漂浮的周日报纸彩页作为参照物保持吊放声纳电缆稳定的过程,充分说明了在茫茫大海上吊放声纳缆绳自动稳定功能对反潜直升机的重要性。
随着控制技术的发展,现代舰载反潜直升机飞行控制系统均具备声纳稳定工作模式,可自动保持机身至海面的声纳干电缆高度和位置稳定。缆高控制实际上是保持直升机悬停高度,相对而言较容易实现[1]。而缆位控制难度相对大一些。国内一些学者的研究主要侧重于声纳电缆受阵风和洋流影响的稳定性仿真研究[2,3],而忽视了声纳绞车机上安装和地板机身开孔设计对缆位控制动态范围的约束。本文主要分析吊放声纳电缆绞车安装设计对反潜直升机飞行控制系统声纳缆位控制稳定性的影响,在此基础上给出绞车安装设计原则以及对缆位控制动态范围的基本需求。
1 飞行控制系统声纳缆位控制原理
缆位控制的一般过程为驾驶员操纵直升机进入迎风悬停模态,将相对海面速度降到0附近;声纳操作员释放水下分机入水至设定深度;当声纳电缆在声纳井中处于受海风和洋流作用的平衡位置时,水下分机基本处于垂直状态,此时驾驶员接通飞行控制系统,进入声纳稳定工作模式。
一旦直升机受到海风和洋流变化干扰,导致电缆偏离平衡位置时,飞控系统通过安装在绞车电缆吊挂点处的角度传感器获得缆位角的变化,自动调整和控制直升机姿态和运动,使电缆回到平衡位置。
以某型舰载直升机为例,其飞行控制系统声纳缆位控制分为俯仰控制和倾斜控制两个通道。
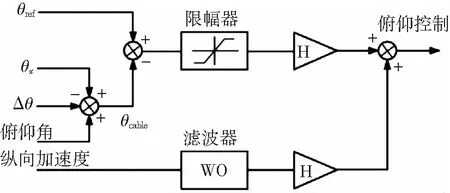
图1 俯仰通道纵向缆位控制
在倾斜控制通道,综合横向缆位ψy、直升机倾斜角、绞车安装角Δψ和横向缆位零位,以及横向加速度等因素,输出倾斜和积分信号控制直升机横滚运动来调节横向缆位(见图2)。

图2 倾斜通道横向缆位控制
2 缆位控制需求和约束分析
2.1 缆位控制动态范围需求
飞行控制系统在俯仰控制通道上,保持θcable=θref,在倾斜控制通道上,保持ψcable=0。其中θcable、ψcable为电缆实际位置,θref为直升机逆风悬停时电缆受恒定风速影响后的平衡位置。

图3 直升机逆风悬停时电缆位置
为提高缆位控制的鲁棒性,并减少飞行控制系统控制规律设计的复杂性,通常要求缆位角有更大的动态范围。
对于大多数安装在直升机舱内的声纳绞车而言,满足较大缆位角动态范围需求,意味着要在直升机机身地板开一个较大的声纳井。但机身地板开孔尺寸受结构强度、机上设备安装空间及油箱位置和大小等多种因素约束。特别是直升机受阵风影响产生姿态变化时,若声纳井开孔尺寸过小,将导致缆位稳定过程中电缆频繁碰壁,从而造成声纳无法稳定探测。
在图4中给出了电缆在声纳井中的运动范围和相对关系。
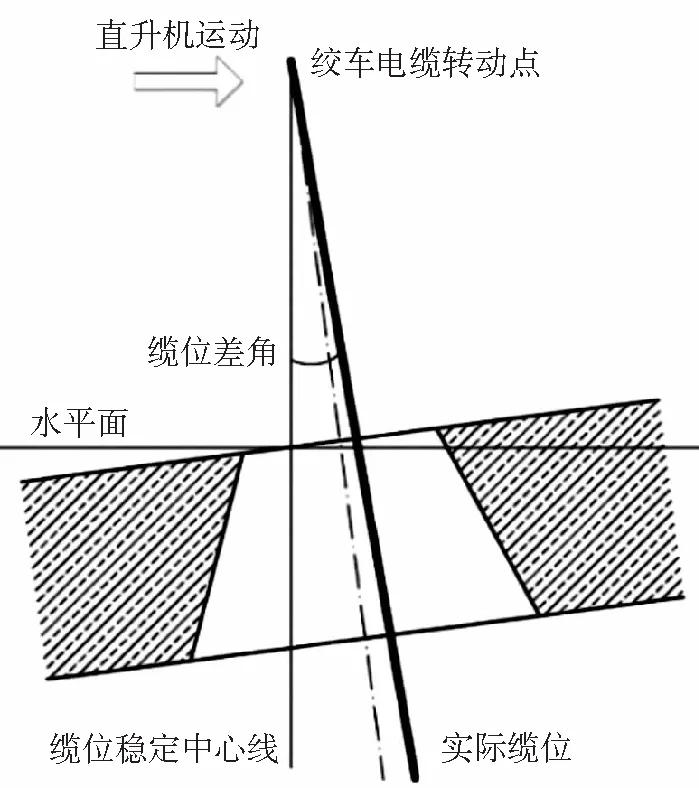
图4 声纳井中电缆运动范围和相对关系
由于飞行控制系统以电缆平衡位置为稳定控制基准,当绞车安装位置设计不合适时,直升机悬停状态下缆位平衡位置将偏离声纳井中心,缆位控制动态范围将出现严重不对称情况,直接影响缆位控制的稳定性。
一旦出现较大扰动使电缆触碰声纳井壁的情况(如图5所示),缆位稳定中心线进入声纳井口外的机身地板内。此时飞行控制系统控制直升机运动,试图将电缆与机身地板内的稳定中心线重合,但因电缆被声纳井壁限位,夹角无法消除,结果将导致直升机拖曳电缆直至水下分机倾斜而无法正常工作。
随着当前国内居民用电量的增大,生产力的发展和人民生活质量水平的不断增强,也为我国电力行业的未来发展提供便利的条件。当前国内对用电需求量的提升也使得电力系统扩大电网的覆盖面积。处于这种时代背景下的电力系统,相关从业人员就要不断增强其运行的安全性、稳定性和有效性,进而才可以不断满足当前电力系统的信息化发展要求。在本质上来看我国经济体系发展,人民日常生活和电力能源产生直接联系,因此相关领域人员要有效掌控电力系统运行的稳定性和安全性,满足人民对于电能日益增长的使用需求。除此之外,电气自动化系统中对于信息化技术的大力应用也可以对电力系统运行期间的故障问题进行有效判断。
因此,声纳绞车机上安装设计合理,是确保反潜直升机飞行控制系统声纳缆位稳定性的重要前提。
2.2 声纳电缆绞车安装对缆位的约束分析
以声纳绞车在某型反潜直升机上的安装设计为例,几何关系如图6所示。
设声纳电缆转动中心高度为H,直升机机身地板厚度为h,机身底部最大开口纵向尺寸为Dmax,则容易得到最大缆位角θmax,如公式(1)。
(1)

图5 直升机拖曳声纳电缆状态示意图

图6 绞车安装与缆位角静态关系图
显然,缆位角的变化范围主要由机身底部开口尺寸和电缆转动中心高度决定。增大声纳井下口尺寸,降低绞车头部可增大缆位角控制范围。
实际上,由于声纳井开口受机身结构和空间限制,国外许多反潜直升机声纳绞车都是尽量降低电缆转动中心高度,在一些大中型直升机上甚至将绞车头部倾斜一定角度后,直接安装在机身地板声纳井开口上。
3 缆位控制动态范围设计与飞行验证
3.1 缆位控制动态范围设计
前面分析了缆位控制需求和静态条件下的绞车设计约束。在声纳绞车安装设计中还需考虑直升机悬停时的姿态影响。
根据直升机的飞行原理,在飞行控制系统保持悬停状态时,直升机机身地板始终存在有一定的抬头和倾斜角。以某型反潜直升机为例,悬停时始终存在约2°~3°的抬头和1°~2°的右倾,加上姿态陀螺有-2°的安装角,实际悬停时地板右倾有3°~4°。如果按照声纳绞车与机身地板水平安装设计并使电缆通过声纳井中心,则直升机悬停时电缆将明显偏离声纳井投影中心,缩小缆位控制的动态范围。
为增加悬停稳定性和有利于缆位稳定控制,应在安装设计时调整绞车的前后左右位置,或增加角度调整垫块,使典型恒定风速下的电缆平衡位置处于声纳井的投影中心附近。
综合以上因素进行声纳绞车安装设计,可以扩大缆位控制动态范围,提高飞行控制系统的声纳缆位稳定性和系统鲁棒性。
当然,在不同恒定风速下可以通过缆位偏移校正调整电缆平衡位置,但合理安装声纳绞车位置可以减少空中偏移校正操作,尽量避免声纳员通过缆位偏移校正直接操纵直升机运动。
3.2 缆位稳定飞行验证
在某型反潜直升机上完成吊放声纳缆位控制范围设计后,进行了飞行试验验证。
图7-图12给出了两次在不同海域进行反潜直升机声纳探测飞行试验的结果,包括飞行控制系统声纳缆位稳定状态的纵向、横向缆位曲线和缆位动态轨迹图,以及直升机的姿态变化曲线。
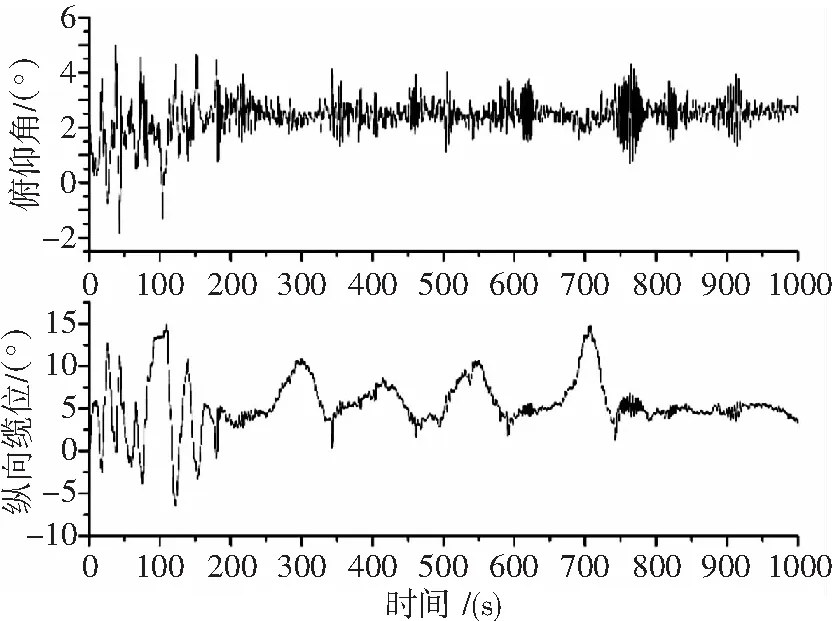
图7 第一次试飞中纵向缆位稳定与直升机姿态曲线
从图中可以看出:
1)图7、图8曲线表明,在第一次试飞中,约150s后接通飞行控制系统声纳工作模式,由人工操作直升机悬停进入到声纳缆位自动保持状态;图9、图10曲线表明,在第二次试飞中,约260s后接通飞行控制系统声纳工作模式,由人工操作直升机悬停进入到声纳缆位自动保持状态。

图8 第一次试飞中横向缆位稳定与直升机姿态曲线
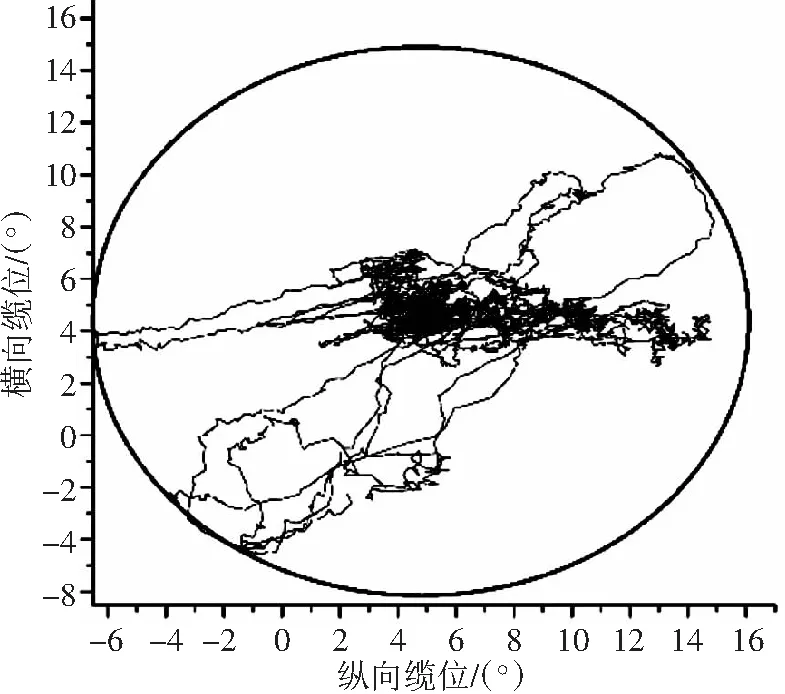
图9 第一次试飞中声纳井投影面中的缆位轨迹曲线

图10 第二次试飞中纵向缆位稳定与直升机姿态曲线
2)在接通声纳工作模式之前,直升机由人工保持逆风悬停,此时姿态变化较大,电缆在声纳井中大幅度摆动。一旦进入声纳缆位自动保持状态,直升机姿态稳定,俯仰角变化基本保持在±2°,倾斜角变化基本上在±1°。电缆明显处于受控状态,其中纵向缆位控制受风速变化影响较大,横向缆位受扰动影响相对较小。

图11 第二次试飞中横向缆位稳定与直升机姿态曲线
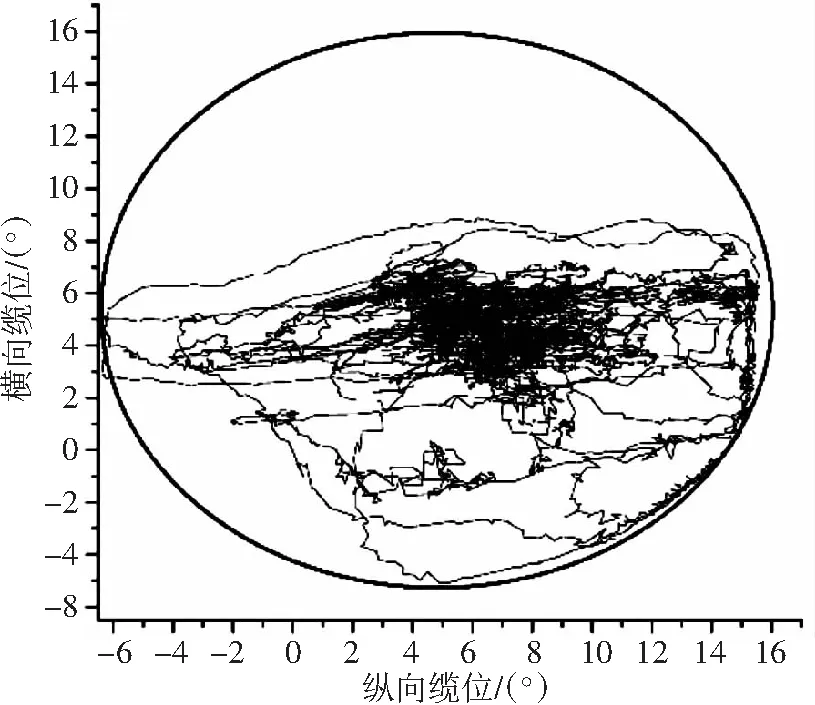
图12 第二次试飞中声纳井投影面中缆位轨迹曲线
3)受阵风和不同海域洋流影响,每次悬停时的缆位稳定中心围绕声纳井投影中心稍有变化,缆位控制精度约为纵向±5°、横向±3°,实际稳定控制范围基本上是一个椭圆形区域。
4)在第一次试飞中有4次偏移到声纳井前沿并回到稳定中心附近的运动,最大偏移量约为10°。综合试飞海域存在较大洋流,以及现场观察到直升机相对海上固定基准存在后侧向运动等情况分析,这是在缆位稳定过程中水下分机受洋流影响漂离中心后,直升机通过后向运动调整缆位的正常结果。
4 主要结论
显然,吊放声纳电缆绞车安装和声纳井设计直接决定了缆位控制的动态范围,对声纳缆位稳定性有着重要的影响。设计中应把握以下原则:
1)绞车安装设计中必须考虑直升机实际悬停时机身地板的水平姿态角,使缆位中心处于声纳井投影面的中心,避免产生电缆碰壁造成拖曳声纳水下分机的现象。
2)应尽量降低电缆转动中心点高度,在减小声纳井设计尺寸,不过多占用机身空间的情况下,扩大缆位动态范围。
3)必须充分考虑阵风和洋流的影响,为飞行控制系统至少提供不少于缆位控制精度3倍的动态范围,以提高系统的鲁棒性。从飞行控制系统实际控制精度和抗阵风干扰能力看,在绞车安装和声纳井设计时,应提供不少于纵向±15°、横向±9°的缆位动态控制范围。
5 结束语
反潜直升机吊放声纳缆位稳定控制设计,不仅仅是飞控系统缆位稳定模态设计问题,绞车机上安装位置、角度,大范围的缆位角控制需求,以及电缆的防碰壁设计等指标均是制约声纳缆位稳定性控制效果的重要因素,需在系统设计时综合考虑。
