非均匀校正算法在雷达红外引导仪上应用∗
2018-09-27张志敏
张志敏
(中国人民解放军92941部队 葫芦岛 125001)
1 引言
在靶场试验中,红外引导仪能用来对快速捕获目标,可以引导雷达波束快速完成对目标的捕获。由于受热像仪器件的半导体材料、制造工艺以及外界温度等因素的影响[9],红外图像的非均匀性的会对成像效果产生严重的影响,使得红外的图像模糊不清。红外图像的非均匀是指在外界均匀光场输入时各单元之间响应输出的不一致性[3],在图像上表现为空间固有模式噪音或固定图案噪声,数学上可采用各像素灰度值与图像所有像素的平均灰度值之比作为热像仪非均匀性的度量。
红外图像非均匀校正算法很多,目前探测器非均匀性校正方法主要有二点温度定标法、多点温度定标法、时域高通滤波法和人工神经网络法(ANN)等[4~6]。基于场景的校正方法对当前图像进行校正时需要用到先前的图像统计信息,计算量复杂,容易产生鬼影[11]。因此,在雷达红外引导仪上非均匀校正选用定标法中的二点定标校正法。
2 非均匀性校正方法
2.1 二点定标校正法
假设各阵列元的响应特性在所感兴趣的温度范围内是线性的,在时间上是稳定的,并假定1∕f噪声的影响较小,则非均匀性引入的噪声为固定模式的乘性和加性噪声[7~8]。在此条件下焦平面阵列元在均匀辐射背景条件下的输出为

式中:ϕ为辐射通量;uij和vij为坐标为(i,j)阵列元的增益和偏置量。对于每一个阵列元来说,uij和vij的值都是固定的,并且不随时间变化。因此采用二点定标校正即可实现红外焦平面阵列图像的非均匀性校正[1]。即:

式中:Gij和Oij为二点定标校正法的增益校正系数和偏置校正系数;yij为校正后的输出。
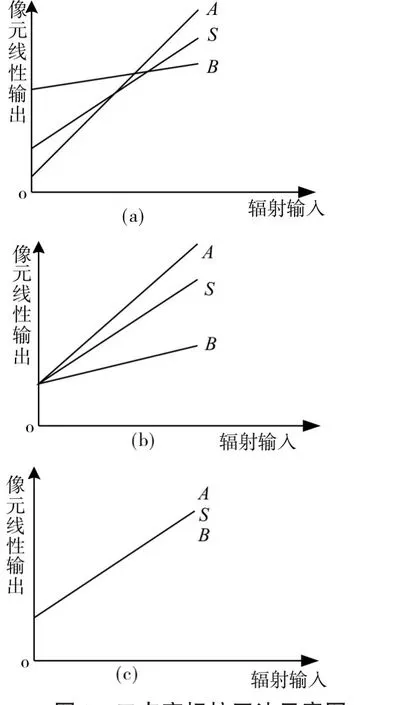
图1 二点定标校正法示意图
二点定标校正法是利用焦平面各阵列元在温度不同的两个黑体(高温TH和低温TL)的均匀辐射下的响应输出,求得Gij和Oij,从而实现非均匀性校正。图1中给出了二点定标校正法的示意图。图(a)和(b)分别为高温和低温辐射的响应输出,图(c)为校正后的输出。S光敏输出元输出信号,A为增益,B偏置量。
2.2 二点定标校正实现方法
二点定标校正法的具体实现方法是:将所有阵列元在高温TH和低温TL下均匀黑体辐射的响应分别归一化为VH和VL,即

(TH,VH)和(TL,VL)两点所确定的直线就是我们拟定的标准直线。其中xij(fH)和xij(fL)分别为像元(i,j)在高温TH和低温TL均匀辐射背景下的响应。
增益校正系数和偏置校正系数即可通过下式计算出来
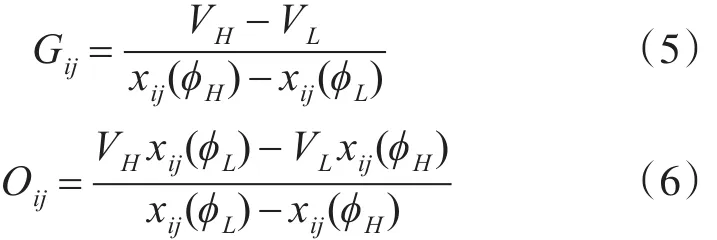
将各阵列元的增益校正系数Gij和偏置校正系数Oij预先存储起来,在探测过程中以此校正系数对探测器的响应值按式(6)不断进行校正。
当用于地面或近地的红外探测,由于地面或近地环境温度通常都处于300K左右[8],采用二点定标校正方法也可获得较好的校正效果。
3 红外成像非均匀校正算法实现
系统设计了两种工作模式来完成红外图像非均匀性校正和显示,各状态的工作内容如表1所示。
在显示工作模式,系统上电复位后DSP对系数存储器初始化(S态),将实验室两点标定过的校正系数(存储在FLASH中)根据实际情况(当前积分时间选择及校正动态范围需求),调入片上高速RAM中待用。其后DSP发送状态转移触发指令,使系统控制状态机进入显示工作模式(S0∕M0)。这一状态下,系统将系数存储器控制权交给FPGA[2],由FPGA采用流水线方式在读出探测器像元信息的同时读出校正系数,并完成各像元的实时校正(乘加算法)过程,校正后的数据写入帧存。帧存控制采用乒乓方式:校正后的图像数据写入帧存A的同时,帧存B按照标准PAL制时序读出前一帧的图像数据,送至显示电路进行高质量显示。
非均匀校正系数的标定通过在实验室内采用高精度面源黑体进行,在-10℃~50℃之间每间隔5℃对不同积分时间进行非均匀参数校正,并装订在像机内[10]。为保证探测背景环境适应性,设计的靶场红外引导仪成像器配置了一个两点面源黑体,黑体低温温度低于环境温度10℃以上[12],解决了夏季环境温度与背景红外辐射温度差异较大而造成的非均匀校正较差的问题,保证了红外成像系统的探测灵敏度。
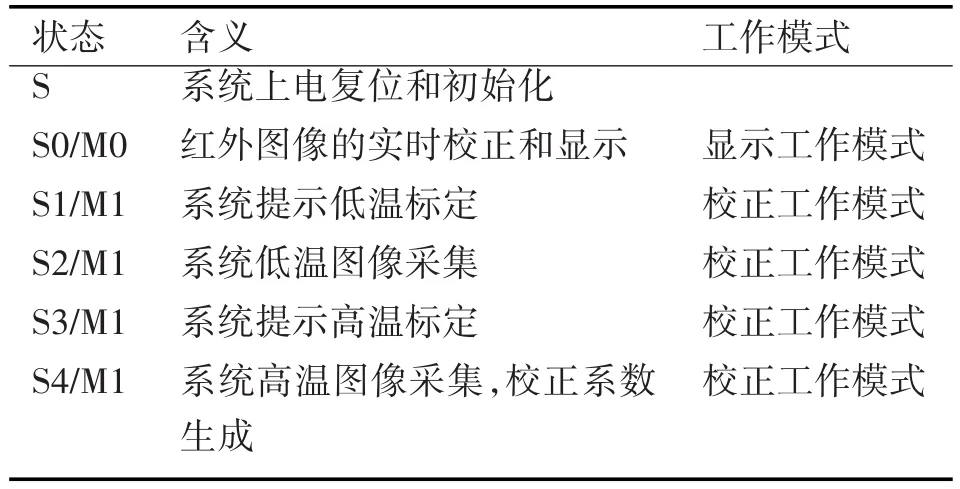
表1 工作模式控制状态机中各态含义
4 验证结果
红外成像采用非均匀校正算法实现,通过DSP和FPGA的设计,使得系统既可以完成校正系数的实验室标定,也可针对实际使用情况选择适当的校正算法以获得最佳的成像质量。图2列出了系统在一些实际场景下拍摄的校正前后的红外比对图像,从中可以看出本系统校正算法的实现效果。
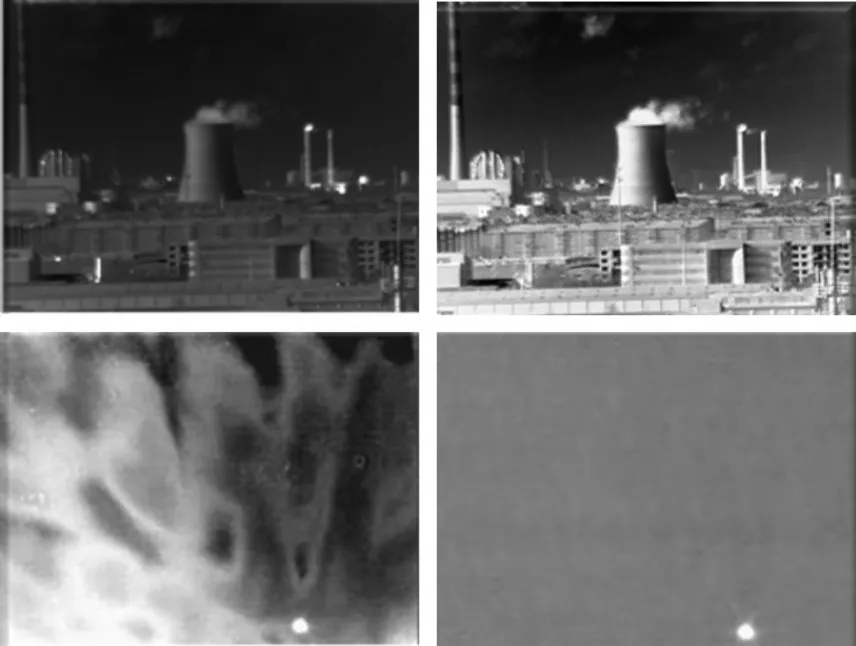
图2 系统在实际场景下拍摄的校正前后的红外比对图像
5 结语
雷达红外引导仪采用二点定标校正法,结合所选红外热像仪,为保证探测背景环境适应性,解决了夏季环境温度与背景红外辐射温度差异较大而造成的非均匀校正较差的问题,保证了红外成像系统的探测灵敏度。雷达红外引导仪的成功研制,较好地解决了雷达在近距离快速目标时捕获目标难题。该系统自投入使用以来,参加并圆满完成了多项试验任务。
