GPS接收机跟踪算法的设计与仿真∗
2018-09-27韩美林乔成芳
韩美林 乔成芳
(商洛学院电子信息与电气工程学院 商洛 726000)
1 引言
GPS作为投入使用最早和当前成熟性最好的卫星导航定位系统,已经被应用在众多领域当中。其中基带信号处理部分即包括捕获和跟踪模块一直是研究的重点。在跟踪模块中,鉴相器的设计和环路参数的设置都是研究的重点,它们决定着接收机定位的精度和速度[4]。捕获和跟踪两者之间是共同作用来实现定位的,然而由于跟踪过程是对捕获结果的精细化,跟踪算法的精度影响着整个系统的精度,算法的好坏直接决定着接收机的性能,所以跟踪算法是接收机设计的重点[5]。
2 载波跟踪环
在完成信号的捕获后,可以得到一个与输入信号有一定频率偏差的本地载波信号。锁相环拥有较小的锁相误差和较高的跟踪精度,为了实现载波的精确同步,GPS接收机的载波跟踪环路一般采用锁相环结构[6]。由于导航数据每经历一个周期(20ms)此时相位就会翻转,而一般的锁相环对180°的相位翻转敏感,所以本文采用的载波跟踪环是Costas环,其对导航数据位的跳变不敏感[7]。Costas环结构如图1所示。

图1 Costas环基本原理图
3 码跟踪环
码相位捕获的目的是通过调整本地码相位使输入信号的码相位和本地码相位相差在一个码片范围之内[8]。捕获后的本地码的频率和相位与输入信号中的码相位和频率有较大的误差,此时必须使用码跟踪环来对其误差进行改进,码相位跟踪是通过对输入码相位变化的精确跟踪,最终使其码相位误差缩小到系统所允许的范围之内,其输出是对GPS信号中的码的精确复制[9]。
本文设计的六路延迟锁定环如图2所示,若输入信号本地复现载波的相位差值等于零时,信号的能量将全部集中在同相支路I;若输入信号本地复现载波的相位差值不等于零即存在差异时,则在信号能量同时分布在同相支路I与正交支路Q中[10]。
如何利用C∕A码的相关信息来设计一个鉴相器用来提高环路的跟踪性能,这是延迟锁定环的核心所在。对相关值的检测通常有两种方式,分别是相干和非相干方式。由于相干延迟锁定环路在信号动态变化的情况下十分容易失锁,所以实际应用中的延迟锁定环鉴别器[11]。一般都使用的是经过归一化的超前-滞后功率算法,它的优点是利用了同相和正交两个支路,性能独立于锁相环其鉴相输出线性度比较好,并且不受信号幅度的影响。但是它的计算量较大,在设计中资源开销比较大。而非相干点积算法虽然计算简单,但受到信号幅度变化的影响比较大,鉴相结果不太理想[12]。所以综上所述,本文对非相干点积算法采用归一化处理,此时鉴别器的输出结果完全不受信号幅值的影响,只和码相位偏差有关系。
4 GPS接收机完整的跟踪环
在GPS信号跟踪中,码跟踪环和载波跟踪环是紧密结合在一起的,两者缺一不可。两个环路在时间上是并行工作的,同时又是协调工作,任何一个环路发生失锁,都会影响环路的正常工作状态[13]。GPS接收机完整的跟踪环路原理如图3所示,从图3中可以看出载波跟踪环路中的I和Q支路均来自码跟踪环中,这样可以减少乘法器的使用,最终使工作量减小。
5 Matlab仿真
利用Matlab进行仿真,其跟踪算法流程图如图4所示。
在跟踪过程中,以捕获结果中保存的卫星参数对跟踪环路进行初始化设置,然后依次从中频数据文件中读取1ms的数据,分别同载波信号和本地码相乘进行去载波和码相关运算。为了保证接收机能够成功地进行定位,本设计中设置有8个通道,总共跟踪到了8颗卫星。以通道4跟踪到的8号卫星为例对跟踪结果进行分析,验证算法的可行性。在跟踪过程中,由于设计中采用的载波跟踪环鉴相器的算法为反正切算法,该算法在正交支路的相关值为零而同相支路的相关值最大的情况下,得到的相位误差最小。

图3 GPS接收机跟踪原理图

图4 跟踪算法流程图
载波环鉴相器和码环鉴相器的输出如图5、图6所示。从仿真结果中虽然在跟踪的初始阶段,载波环鉴别器和码环鉴别器的误差不稳定,但经过一段时间后,载波鉴相误差和码环鉴相误差集中在0值附近,鉴相值基本保持稳定,此时载波环和码环滤波器的输出也趋于一条直线。此时利用滤波器的输出对本地C∕A码和载波频率进行调整,使其和卫星信号保持一致。

图5 载波环鉴相器的输出
为了使卫星信号中码序列和本地C∕A码相位对齐,则需要调整超前、即时和滞后码相位值,三个支路的输出包络图如图7所示,从图中可以看出,经过短暂的时间后环路趋于稳定跟踪,超前和滞后支路的输出信号强度比较小,并且其信号强度基本相等。而即时支路的包络输出信号比较强。在跟踪环路中三个支路的码间距被设置为0.5个码片,所以从图中可以看出,超前和滞后码的输出信号值大概等于即时支路输出信号大小的一半,验证了仿真结果和论文中对伪码跟踪环路的设计相符。

图6 码环鉴相器的输出

图7 超前、即时和滞后码的相关值
接收机从捕获步入到跟踪状态,进入跟踪的初始阶段,锁相环还未锁定,输出类似于噪声的数据信息。经过短暂的时间处理后,跟踪环路稳定的跟踪到信号时即中频信号中的载波和本地载波相同,伪码和本地C∕A码相位对齐,说明跟踪环路则锁定了信号,可以解调出导航数据。
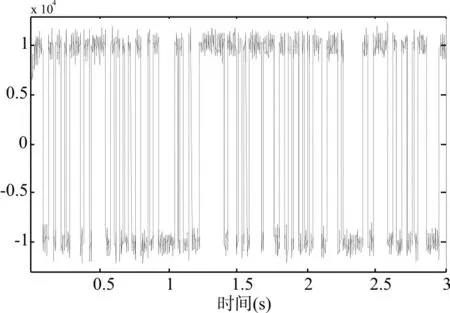
图8 导航数据
6 结语
本文对GPS接收机的跟踪模块进行了深入研究,分别对载波跟踪环和码跟踪环路结构进行了设计。采用了码环与载波环相互耦合的结构,在码环和载波环中分别采用了非相干的延迟锁定环路和相位跳转不敏感的Costas环路;鉴别器对点积算法进行了归一化处理。仿真结果证明了设计的跟踪算法能稳定地跟踪到各个通道的可见卫星且能够成功地解调出导航电文。
