老算法的新应用(下)
2018-09-25张智勇
张智勇

随着高性能微处理器的尺寸越来越小、价格越来越低,电流、频率、相位均可调的正弦波控制逐渐替代简单的PWM方波驱动电机,实现了更可靠的启动、更顺畅的加减速和更平稳安静的运行。这使得无人机不仅能可靠、精确地控制自身飞行姿态和轨迹,其上搭载的精密设备也能在震动更小的平台上执行更多样化的任务。
FOC控制在无人机/航模领域的兴起
上述控制方式被引入到无人机/航模无刷电调的设计后,发展出无感FOC电调(图1)。近两年来,越来越多的无人机/航模厂商开始研发生产采用FOC矢量控制方案的电调(图2)。
无感FOC电调和普通方波控制电调在硬件构架上差别不大,最大的区别是前者采用了正弦波驱动电机(图3)。因为方波控制只能调节占空比,而正弦波能同时调节输出电压、正弦波频率和相位,所以在无感FOC电调控制下的磁场是旋转的、而非跳跃切换,不仅减小了电机的脉动转矩,运行更平稳、更安静,而且峰值电流的脉动也大大减小。此外,无感FOC电调可通过计算向量关系,实时调整3组正弦波的相位,进行精确的扭矩控制,而方波电调却只能设置一种或者“高-中-低”少数几种简单的进角。因此,受无感FOC电调控制的电机拥有更好的启动和加减速性能。
之前,笔者曾总结过FOC控制方案的优点,这些也体现在采用了FOC控制方案的电调里。
1.转矩脉动小,更静音。
使用FOC控制方案的电调,其所在电动动力系统的最大特点是安静(图4)。由于采用了矢量控制、正弦驱动,电机的转矩脉动非常小、噪声更小。举例来说,某些使用方波控制的传统电调,与之相连的电机在启动时会发生抖动,并发出“咔咔咔”的声音;在急加油门时,会发出刮擦声。而使用FOC控制方案的电调,电机就不再发出这些声音。
2.峰值电流更小
使用方波控制的电调,在急加油门时可能因续流时间过长导致电机堵转。而使用FOC控制方案的电调,从原理上杜绝了这种现象。因为采用这种控制,电调不会一直在电机绕组上加载全电压,所以绕组线圈中的峰值电流更小。这不仅减小了绕组线圈发热带来的能量损失,也降低了大峰值脉冲电流可能给电机元器件造成的损伤。
3.加减速性能更好
因为无感FOC电调的相电流采用了矢量解算、正弦波控制,所以在电机加减速时能更好地调整相位、控制转矩,获得更快的响应速度。
传统方波控制的电调,一般不支持电压相位超前,控制电机力矩(电流)时,电流相位会出现延后的现象。而FOC控制的电调能做到电压相位超前,改变电机力矩的响应速度更快。另无感FOC电调可做能量回馈制动,相比传统方波电调利用电机本身的感应电流刹车,减速制动的响应速度更快。
FOC电调的技术方案特点
采用FOC控制的电调与方波控制相比,虽然主要电路结构近似,但因控制方式有很大改变,故前者不仅在控制软件算法方面比后者更复杂,而且对主控芯片的计算能力、MOS管的响应速度、感应电动势的采集电路都有更高的要求。
FOC控制算法的理论是公开的,有兴趣的读者可以通过查阅书籍文献,或者各大芯片厂商的官网获得FOC控制方案的软件算法,如应用笔记、参考源代码等。在某些方案中,只要稍微调整一下代码中的参数,就可以上机运行。
除了算法问题,设计无感FOC电调时,还应选择合适的主控芯片。采用方波控制的电调,算法相对简单,较低端的单片机(如C8051F390,主频50MHz)即可满足需求(图5)。而无感FOC电调,则需要运行速度更高的主控芯片,才能满足算法要求(图6)。
以热销的大疆“精灵”消费级四旋翼无人机系列为例,其第二代产品使用的是方波控制电调,第三代产品则采用了基于TI INSTA-FOC方案的无感FOC电调。其主控芯片为DRV8301和F28027F组合,主频90MHz,可对48KHz范围内的频率进行调整(图7)。相比采用方波控制电调的第二代产品,新一代产品的工作噪声明显下降,启动、加速也更顺畅,用户使用后普遍反映较好。
有的业余爱好者用开源单片机,成功做出了FOC矢量控制电调。笔者曾看过有模友用英飞凌(Infineon)ARM M0处理器(XMC1300/XMC1301/XMC1302单片机,主频32MHz)自制的无感FOC电调,相比前文提到的TI INSTA-FOC方案的90MHz单片机,运行速度明显慢一些。具体表现是这款自制的无感FOC电调,其单片机执行无感FOC算法的时间更长,只能做到24KHz范围内的频率调整。也有模友曾用Microchip AN1078处理器自制电调,效果还不错。
因为软件算法的通用性,所以更高端的DSP芯片也可用于自制无感FOC电调(图8),如DSPIC 33FJ12MC202、DSPIC 33EP32MC202等。常见的是SSOP28封装,体积更小的QFN28封装会贵一些。总的来说,自制无感FOC电调的运行速度主要取决于主控芯片的主频,大家可在芯片价格与电调运行速度之间寻求最优解决方案。
除此之外,Microchip、NXP、FreeScale等知名芯片厂商都有自己的FOC控制方案,配有详细的芯片资料和开源代码开发文档。
FOC电调的位置检测
从控制理论上说,无感FOC电调需要对相位进行调节,即准确知道电机转子的位置,也就是电相位角度。对于装有位置传感器的无刷电机,这点容易实现,通过霍尔元件或变压器式角度传感器即可获知角度信息。消费级航拍无人机的相机云台,其中的两自由度云台控制电机,就是带有位置传感器的无刷电机。与之类似的手持云台,其电机采用的也是FOC矢量控制方案,能精确灵敏地让镜头取景(图9)。
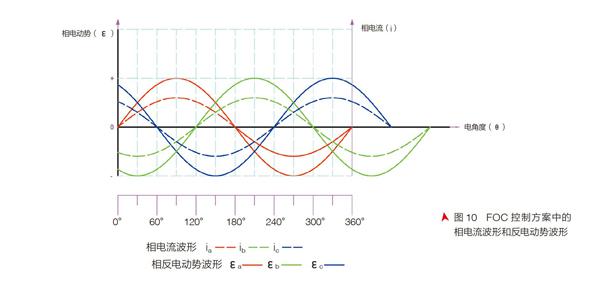
动力电机多为无位置传感器的无刷电机。如前文所述,采用方波控制的电调,与之相连的电机的反电动势也为方波,电调的感应电路通过检测过零点进行换相。换成FOC控制方案后,电机的反电动势为正弦波(图10),但电调的感应电路通过反电动势只能检测过零点,无法准确反映当前电机转子的角度位置。而无感FOC电调的反电动势检测电路,通常只会添加两个采样电阻和1个双运放,并不会大幅修改电路架构。
现有的解决方法是,通过检测到的过零点,来推测当前电机转子的角度位置。以前面提到的TI INSTA方案为例,该芯片程序有个叫FAST观测器的模块。这个模块可基于相电压和相电流的变化估算电机转子的位置,且估算的电相位角度非常准确。在FAST模块的帮助下,实际测试中采用FOC控制方案的电动动力系统在转速低至30 - 50转/分的情况下,速度闭环依然很平顺,而传统的方波电调则很难在这么低的转速下稳定运行。遗憾的是,TI INSTA方案把FAST的代码以库的形式固化在ROM里,这部分并不开源。相比之下,Microchip就公开了所有源代码,方便了懂得编制算法的资深玩家。
FOC电调的启动控制
电调能否可靠地启动电机并迅速、平稳地加速到工作转速,对使用效果有很大影响。因此与方波控制电调一样,无感FOC电调的启动算法也十分关键。
在无法很好解决电机转子位置估算问题时,有些方案选择避开这个难题:先采取方波启动,待电机转速稳定后再切换成FOC控制运行的方式。这个方法还是不错的。
而在有类似TI INSTA方案的FAST观测器模块的情况下,则可全程使用全正弦驅动,同样能获得平滑稳定的正弦波启动效果。
FOC技术的局限性
虽然采用FOC矢量控制技术的电调有诸多优点,但并非毫无缺点。方波控制的电调,适用于多种电机;而无感FOC电调,则无法达到前者那么高的电机兼容性。
原因是FOC控制方案需要判断电机转子的实时位置,而观测器模块其实是通过建立电机的数学模型,用检测反向电动势估算得到的,不像方波控制那样只要知道过零点就可以了。而要建立电机的数学模型,就得用专业的LCR测试仪器测量电机参数,并将这些参数输入算法的头文件里。也就是说,受制于算法本身,FOC矢量控制高度依赖电机的数字模型,不仅需要针对电机的参数做匹配,而且匹配之后不能随意更换其他参数的电机。
尽管无感FOC电调在不同电机的兼容性方面还有待改善,但在固定参数的成套设备上已经显现出优势,赢得了用户的广泛好评。
