复合式动量系统与未来空间飞行器
2018-09-25曹峻峰
曹峻峰
(哈尔滨市卓加科技有限公司,黑龙江哈尔滨,150010)
1 可续能空间飞行器的工作原理
可续能空间飞行器的动力系统为力场发动机,该发动机的动力产生方式源于复合式动量系统的动量特性(详见论文),即该发动机以其独特的复合式动量结构,通过改变陀螺仪组的轴向运动轨迹,生成整个系统单一轴向上的有效科里奥利力,进而形成循环往复的矢量力场,该力场亦可称为正弦矢量力场(详见发明)。因此,可续能空间飞行器可在该力场的作用下,做周期性匀加速直线运动。至于空间飞行器在三维坐标系中的空间旋转运动这里不做过多描述。其实验室操作模型可通过齿轮传动的方式实现系统运。

图1 可续能空间飞行器实验室模型图
力场发动机靠电能维持运行,在宇宙中电能可以靠太阳能板收集转化,这样组合就达到了空间飞行器可续能的目的。以上为可续能空间飞行器的工作原理。
2 关于光速飞船的可行性讨论
对于光速飞船的理论可行性,目前网络能查到的观点主要分为两大派,一派是类似黑科技的“曲速引擎”,即墨西哥物理学家米格尔·阿库别瑞在1994年提出阿库别瑞引擎。这是一种理论上的机制,可以使宇宙飞船在周围形成的“曲速泡”中扭曲时空,从而进行超光速飞行。另一派是相对现实的“高能飞船”,即通过高效化学能源所产生的高倍加速度使之达到光速。
以上这两派学说就目前人类科技水平而言,实现起来均存在很大难度。我们先说“曲速引擎”,之前也只是在科幻小说中听说过,目前也只是停留在理论论述阶段,还没有一套完整可行的方案以供实验。并且该学说也被其他科学家证实存在一定的弊端,即阿库别瑞引擎装置会令时空过度扭曲,导致宇宙飞船释放出大量的高能粒子,并最终发生毁灭性爆炸。这种装置不可能使超光速宇宙飞船安全着陆,更别说载人飞行了。相对而言“高能飞船”的学说要现实很多,但要从载人航天的角度实施起来亦存在两个硬性问题。其一是高效能源本身的质量将给飞行增加不小的负载;其二是高倍加速度飞行状态下人体正常生理机能是无法适应的。因此,上述两派学说所提供的方案以人类目前的科技水平还无法实现,只能静等人类科技的攀升。
不过作者认为,出现眼下这种进退两难的状况并非人类科技瓶颈所限,也可能是我们在航天飞行逻辑上走进了一个误区,其主要原因是近代科幻小说及电影的影响,大部分涉及航天飞行的科幻小说或电影都是人们跳出科学异想天开的产物,所以大部分人及学者的潜意识中会认为空间飞行器的工作方式应该是只要其尾部的光束亮了,飞船就可以瞬间进入超高速或光速状态。不是说这种想法不正确,只是以目前人类科学技术想达到这种状态还有很长一段距离。这就好比16世纪末蒸汽机还没有诞生,人们已经在憧憬火车应该是磁悬浮的一样。
目前我们正处在宇宙探索的初期,所有航天飞行的技术均为试验性技术,应该先抛开美好的憧憬,脚踏实地地在现有科技的基础上钻研、实践、升级。下面我们讨论一下以目前科技水平制造光速飞船需要满足的条件。作者认为至少应该满足以下四条:(1)飞船动力系统(发动机)其动量特性可通过常规机械结构实现,其合成材料可通过地球物质提炼加工而成。(2)飞船动力系统(发动机)所消耗的能源可以在外太空飞行条件下得到补充。(3)飞船在达到光速之前均可以获得持续稳定的能源补充。(4)外太空可提供充足的飞船补充能源。
结合第一章的内容我们可知,第一条和第二条的条件通过可续能空间飞行器的工作原理便可实现。下面我们详细讨论一下第三条与第四条。首先满足第三条需要的基础条件是能源在补充过程中其传播速度达到光速,可续能空间飞行器上装设的太阳能板所收集的太阳能刚好可以满足这一基础条件,即太阳能是靠太阳光传播,太阳光以光子形式传播,光子的转播速度为光速。其次满足第四条需要的基础条件是外天空有充足的恒星可提供太阳能,即恒星能(太阳能是指太阳的热辐射能,理论上所有恒星都具备这样的能量,并且该能量时时向外传播,“太阳”是人类给太阳系中的恒星所起的名字,因此本文中所提到的“太阳能”亦可称为“恒星能”)。稍微了解天文知识的读者一般都知道银河系拥有数以千亿计的恒星,它们中的每一颗都是独一无二的,并且都可以发光,以此源源不断的向外界传播恒星能。如此庞大数量的恒星即可为飞船提供充足的补充能源。当然,寄于对人类科技的展望,微型核电池的诞生也可以让我们在不依靠恒星能源的条件下实现光速飞行。
上述讨论范围是作者根据现有理论所建立的光速飞行基础条件,也只是最少需要满足的条件,还有很多实际问题没有考虑进去,不到之处还望专家学者们多多指教,但就以上问题的理论分析可知,以人类目前科技水平结合可续能空间飞行器的工作原理实现光速飞行是有一定可行性的。
3 关于光速飞船的理论模型算
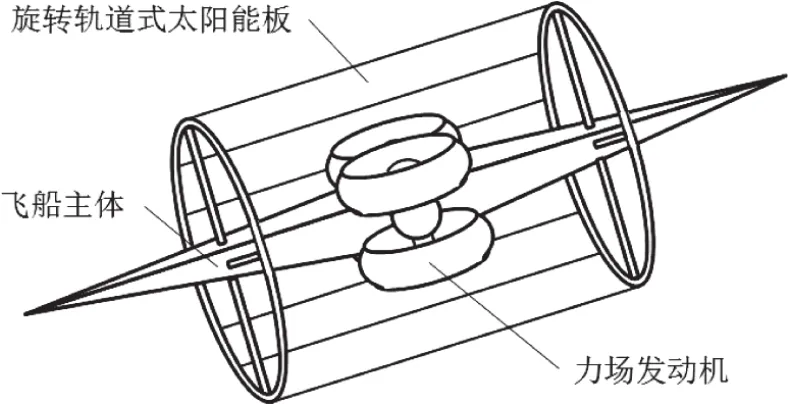
图2 光速飞船理论模型图
轮动陀螺仪组力场发动机在做匀加速直线运动时其运动模式很像船的双桨在水中划水(如图2),因此在此过程中力场的大小是成正弦曲线变化的,其变化最大值为陀螺仪组产生科里奥利力矩的总和(详见论文及发明)。下面对其在光速飞船理论模型上的理想假设进行粗略计算。
3.1 参数设定
可续能空间飞行器体积:小于75m3
力场发动机的联动方式:双轴联动
力场发动机的驱动形式:四驱形式
双轴电动机:采用超低速大扭矩电动机
数量:2台
额定转速:6.5r/min
额定角速度:0.68rad/s
额定扭矩:2200N.m(力臂:1m)
额定功率:1.5kW
质量 :100kg(m1)
陀螺仪:采用高速大功率外转子电动机
数量:8台
额定转速:3000 r/min(含负载)
额定角速度:314 rad/s
额定扭矩:950 N.m(力臂:0.7m)
额定功率:0.3 kW
质量 :12kg(m2,负载部分为 10.5kg)
蓄电池组:采用高密度锂电池
存储电量:30000Wh
重量 :50kg(m3)
太阳能板:采用超轻柔性太阳能板
功率:6kW
重量 :120kg(m4)
外壳及框架:采用超轻高强度合金
重量 :80kg(m5)
根据上述参数的可下调裕度,其它配件重量可忽略不计,进而得可续能空间飞行器总重量m=m1*2+m2*8+m3+m4+m5=1 00*2+12*8+50+120+80=546kg。
以上参数来自于百度搜索,均为国产民用设备参数,如果从专业角度按目前最新科技设计,可在此基础上相应提高,本参数仅供粗略计算参考。
3.2 理论计算
根据陀螺仪进动特性可知:Ω=M/H
其中:Ω-陀螺仪进动角速度(0.68rad/s,见双轴电动机参数)
M-外力矩(即为陀螺仪反向扭矩T)
H–陀螺仪转子动量矩
因此,单台陀螺仪所产生的反向扭矩为:
T=M=H*Ω=0.68H
根据角动量守恒原理可知:
H=J*ω
其中:J–陀螺仪转子转动惯量
ω–陀螺仪转子角速度(314rad/s,见陀螺仪参数)
因此,单台陀螺仪所产生的反向扭矩为:

根据经典力学原理可知:

其中:m–陀螺仪转子质量(10.5kg,见陀螺仪参数)
r–转子质点到陀螺仪轴心距离(0.7m,见陀螺仪参数)
因此,4台陀螺仪所产生的反向扭矩为:

因为单台双轴电动机额定扭矩为2200 N.m,并且4394.24 N.m≤2200 N.m *2,所以该配置可以满足可续能空间飞行器正常工作需求。
根据杠杆原理可知:

其中:FMAX–陀螺仪组反作用力的最大值
L–轮动陀螺仪组反向扭矩力臂(1m,见双轴电动机参数)
因此,轮动陀螺仪组反作用力最大值为:

根据正弦波特性可知:

其中:FMEAN–陀螺仪组反作用力的平均值
K–正弦波平均值系数(0.6366)
因此,可续能空间飞行器上正弦矢量立场所产生的平均推力为:
F= FMEAN=4394.24*0.6366≈2797.37 N.m根据动量守恒原理可知:

其中:F–正弦矢量立场所产生的平均推力
m–光速飞船总重量
v-光速(3*105km/s)
因此,可续能空间飞行器速度从0达到光速所需要的时间为:
t=mv/F=546*3*105*103/2797.37
=58659848.09s≈16294.40h≈679day
因此,根据加速度公式可以进一步计算出可续能空间飞行器速度从0达到光速所行驶的直线距离为:
S=(1/2)at2=(1/2)(v/t)t2=(1/2)vt
=0.5*3*105*58659848.09≈8.80*1012km
≈58824.37AU≈0.854ly
其中:AU - 天文单位,1AU=149597870.7km
ly - 光年,1ly≈9.46*1012km
3.3 结语
天文学家普遍认为50亿年前形成太阳及其行星的星云残余物质包围着太阳系,并称之为奥尔特云,是一个假设包围着太阳系的球体云团,布满着不少不活跃的彗星,距离太阳约50000至100000个天文单位,差不多等于一光年。
通过上述计算可知结合可续能空间飞行器的光速飞船模型在不间断供电的情况下,持续做匀加速直线运动,可在到达奥尔特云时接近光速。当然考虑到太阳光的传播过程衰减,以及力场发动机与太阳能板的工作效率,以地球为起始点的话,目前人类科技尚无法使该模型在驶入奥尔特云之前达到光速,不过在穿越奥尔特云之后达到光速的可能性仍是存在的,前提假设上述光速飞船模型可以在不减速的状态下顺利穿越奥尔特云,并在无任何阻碍的情况下飞入其它恒星星系,从而继续得到恒星能源补给,进而有望将该模型的直线飞行速度提高至接近光速或光速。
4 关于仿重力飞船的可行性讨论
仿重力飞船相对于光速飞船的可行性技术难度要大得多,理论上如果人类真的制造出加速度接近重力的飞船,那么通过该飞船反向重力加速度与地球重力加速度的抵消方式亦可实现飞船的地表大气悬浮状态。所以这一技术的突破对于人类来说将是动量系统史上质的飞跃。不过以人类目前科技水平想达到该项成果可以说几乎不可能,主要原因是飞船本身加速力场与其质量的比值,即飞船加速度无法实现大于等于9.8m/s2。
想达到这一目的,眼下我们可以向两方面进行科技拓展,其一是增大飞船加速力场,其二是降低飞船的总质量。就增大飞船加速力场而言,根据陀螺仪的定轴特性可知,陀螺仪的稳定性与转子的转动惯量及转子的角速度成正比,通俗理解就是增大转子质量或提高转子转速均可增大飞船的加速力场(在飞船加速力场增大的同时还需配置更大扭矩的低速电机以完成陀螺仪轮动工作),这里作者更倾向于提高转子转速的方法,主要原因是增大转子质量的方法本身与上述降低飞船总质量相冲突。提高转子转速可以通过建立更高效的电磁旋转机制实现。即通过研发合成超导高散热材料,以取代电机中导电材料;或通过高纯度提炼配合高密度合成工艺加工超高磁性磁石,以升级电机中磁石等方式来完成。相比之下超导高散热材料更容易实现,石墨烯提炼技术的升级即符合这个发展方向。接下来我们再说一下如何降低飞船的总质量,满足这一要求方法相对单一,即生产出超轻、高强度的工程材料以取代原飞船的整体框架及外壳。这样看来石墨烯材料的量化生产也恰好符合这个发展方向。
(注:石墨烯是一种由碳原子以sp2杂化方式形成的蜂窝状平面薄膜,是一种只有一个原子层厚度的准二维材料,所以又叫做单原子层石墨。是除金刚石以外所有碳晶体的基本结构单元。作为目前发现的最薄、强度最大、导电导热性能最强的一种新型纳米材料,石墨烯被称为“新材料之王”,科学家甚至预言石墨烯将“彻底改变21世纪”。极有可能掀起一场席卷全球的颠覆性新技术新产业革命。)
以上是作者对人类未来仿重力飞行技术的憧憬,也许有一天当石墨烯材料真的可以实现量化生产时,我们实现仿重力飞行、行星大气悬浮、星际旅行等科幻场景便不再是梦想!
5 关于仿重力飞船的理论模型算

图3 仿重力飞船理论模型图
相对光速飞船模型,仿重力飞船模型所配置的力场发动机也要进行相应的改进,在原发明中发动机结构基础上增加陀螺仪对数,如果将原有方式称之为双轴联动机制的话,那么仿重力飞船的理论模型完全可将原有方式升级至八轴联动机制。在这种情况下轮动陀螺仪组力场发动机在做匀加速直线运动时,其运动模式很像船有八只桨在水中划水(如图3),因此在此过程中力场的大小也是成正弦曲线变化的,其变化最大值为双轴联动机制方式下陀螺仪组产生科里奥利力矩总和的2.614倍,变化最小值为双轴联动机制方式下陀螺仪组产生科里奥利力矩总和的2.414倍。这样便可使得仿重力飞船加速度的变化区间在加速度平均值的±4%区间浮动,也就是说如果加速度可以达到地球重力值的话,该浮动区间是人类生理机能可以适应的,下面对其在仿重力飞船理论模型上的理想假设进行粗略计算。
5.1 参数设定
可续能空间飞行器体积:小于75m3
力场发动机的联动方式:八轴联动
力场发动机的驱动形式:四驱形式
双轴电动机:采用超低速大扭矩电动机
数量:2台
额定转速:6.5r/min
额定角速度:0.68rad/s
额定扭矩:4200N.m(力臂:1m)
额定功率:3.0kW
质量 :200kg(m1)
陀螺仪:采用高速大功率外转子电动机
数量:3台
额定转速:2000r/min(含负载)
额定角速度:314rad/s
额定扭矩:950N.m(力臂:0.7m)
额定功率:0.2kW
质量 :10kg(m2,负载部分为 7.5kg)
蓄电池组:采用高密度锂电池
存储电量:40000Wh
重量 :70kg(m3)
太阳能板:采用超轻柔性太阳能板
功率:10kW
重量 :200kg(m4)
外壳及框架:采用超轻高强度合金
重量 :150kg(m5)
根据上述参数的可下调裕度,其它配件重量可忽略不计,进而得可续能空间飞行器总重量m=m1*2+m2*32+m3+m4+m5=200*2+10*32+70+200+150=1140kg。
以上参数为作者在光速飞船理论模型的基础上根据实际需求调整所得,与实际应用参数比较会有一定出入,如果从专业角度按目前最新科技设计,可在此基础上做进一步提高,本参数仅供粗略计算参考。
5.2 理论计算
根据陀螺仪进动特性可知:Ω=M/H
其中:Ω-陀螺仪进动角速度(0.68rad/s,见双轴电动机参数)
M-外力矩(即为陀螺仪反向扭矩T)
H–陀螺仪转子动量矩
因此,单台陀螺仪所产生的反向扭矩为:
TGR=M=H*Ω=0.68H
根据角动量守恒原理可知:
H=J*ω
其中:J –陀螺仪转子转动惯量
ω –陀螺仪转子角速度(314rad/s,见陀螺仪参数)
因此,单台陀螺仪所产生的反向扭矩为:
T=0.68H=0.68J*ω
根据经典力学原理可知:
J=m*r2
其中:m–陀螺仪转子质量(7.5kg,见陀螺仪参数)
r–转子质点到陀螺仪轴心距离(0.7m,见陀螺仪参数)
因此,14台至16台陀螺仪所产生的平均反向扭矩为:TMEAN=4*2.514*T=4*2.514*H*Ω=4*2.514*m*J*ω*Ω=4*2.514*m* r2*ω*Ω=4*2.514*7.5*0.72*314*0.68≈7890.80N.m
14台至16台陀螺仪所产生的最大反向扭矩为:TMIX=4*2.614*T=4*2.614*H*Ω=4*2.614*m*J*ω*Ω=4*2.614*m* r2*ω*Ω=4*2.614*7.5*0.72*314*0.68≈8204.68N.m
因为单台双轴电动机额定扭矩为4200N.m,并且8204.68N.m≤4200N.m *2,所以该配置可以满足可续能空间飞行器正常工作需求。
根据杠杆原理可知:
FMEAN=TMEAN/L
其中:FMAX–陀螺仪组反作用力的最大值
L–轮动陀螺仪组反向扭矩力臂(1m,见双轴电动机参数)
因此,轮动陀螺仪组反作用力平均值为:FMEAN=7890.80N
根据正弦波特性可知:
八轴联动机制的正弦浮动范围为其平均值的±4%
因此,可续能空间飞行器上正弦矢量立场所产生的平均推力范围为:
F= FMEAN±4%=7890.80N±4%
因此,根据加速度公式可以进一步计算出可续能空间飞行器加速度范围为:
A=F/m=(7890.80/1140)±4% ≈ 6.92±4%m/s2
5.3 小结
通过上述计算可知结合可续能空间飞行器的仿重力飞船模型在目前民用科技的基础上只能模拟地球重力70%的水平。上述计算也只是理想情况下的假设,实际应用还会有一定的出入,至于出入有多大这里就不详细讨论了,此方案也仅供读者参考。
不过在此基础上采用目前人类相关方面的最高科技,我们或许可以达到模拟地球重力80%甚至更高的水平,放眼未来如果我们能生产出质量更轻、强度更高的工程材料,将本模型中的飞船整体质量降至在805kg以下的话,那么仿重力飞船便不再是假设,人类也将迈入星际探索的新纪元!
6 结论
(1)可续能空间飞行器可以通过其自身配置的太阳能板将太阳能收集转化为电能,并以此维持力场发动机的正常运行,产生稳定动力源,达到飞行器空间飞行可续能的目的。
(2)结合可续能空间飞行器的光速飞船模型在理想情况下,持续做匀加速直线运动,可在到达奥尔特云时接近光速。如果把现实环境中的不可行因素考虑进来,需要假设该光速飞船模型可以在不减速的状态下顺利穿越奥尔特云,并在无任何阻碍的情况下飞入其它恒星星系,从而继续得到恒星能源补给,进而有望将该模型的直线飞行速度提高至接近光速或光速。
(3)结合可续能空间飞行器的仿重力飞船模型在目前民用科技的基础上只能模拟地球重力70%的水平。若采用目前人类相关方面的最高科技,或许可以达到模拟地球重力80%甚至更高的水平。寄于对人类科技发展的厚望,石墨烯技术的蓬勃发展或许可使该项技术进入实体实验阶段。
