蛇形微型探测器探究
2018-09-22章程
章 程
(江苏省海安高级中学,江苏南通226600)
0 引言
传统的移动机器人无法适应复杂环境,特别是自然灾害造成的废墟罅隙空间。近年来,有学者研究了蛇形机器人,利用其身体纤细、横截面小的特点,能够进入一般机器人无法到达的地方,甚至是人类不宜工作的某些区域,深入探测,配合外围人员了解灾情,对解救伤员起到积极作用。因此,小巧的结构和灵活的运动方式成为此类机器人研究的重要方向。
国外学者对蛇形机器人的三维步态动力学模型有所研究,G.Chirikjian[1]、R.Hatton[2]分别建立了螺旋侧移运动动力学模型以及躯体与地面接触点与侧移运动椭圆曲线之间的几何关系,H.Yamada[3]提出了弧形连杆结构,使蛇形机器人运动曲线更为平滑。国内学者孙洪建立了攀爬蛇形机器人的数学模型[4]。本文侧重研究蛇形探测器的三维运动方式及其前进与后退原理,使其能适应复杂的工作环境。
1 蛇形探测器结构设计
蛇形探测器采用模块式结构,具有较好的灵活性。每个躯块安装有两个可正反转的驱动电机,实现探测器的三维空间运动。所设计的蛇形探测器结构如图1所示,电机安装方式如图2所示。

图1 蛇形探测器结构

图2 电机安装图
该探测器具有双向行进的功能,两端都可作为主动力,若一端被卡住,不能正常前进,另一端担负起提供动力的责任,反方向解救出探测器。双向动力设计使探测器运动更加灵活,可以避免其在复杂地形下出现缠绕的情况。
2 蛇形探测器运动分析
蛇形探测器的运动状态主要归结为4种形态:未驱动状态、拱起状态、推进状态和扭动状态。蛇形探测器每个躯块的周身外表(前后两面除外)设计有8个可以前后摆动的小爪,模仿蛇的刚毛。蛇形探测器的行进主要依靠摩擦阻力矩,当所有小爪置为后倾状态时,在各电机的协同作用下,蛇形探测器可以前进,反之,蛇形探测器可以后退。以7个活动躯块,其中3个躯块拱起为例,分析蛇形探测器爬行运动受力情况。
2.1 未驱动状态
蛇形探测器未驱动时运动状态(即初始状态)呈直线排列,如图3所示。

图3 蛇形探测器未驱动状态示意图
设每个躯块质量相同为m,摩擦力为f,躯块长度为L,小爪后倾时躯块与地面摩擦系数为μ,躯块间间隙忽略不计。要使蛇形探测器运动,必须满足下列条件:

2.2 拱起状态
将各躯块小爪置为后倾状态,前进摩擦阻力则小于后退摩擦阻力。躯块1和躯块2保持不动,同时控制躯块3、躯块4和躯块6上的外壳旋转电机,使躯块3以躯块2和躯块3的链接点为支点,产生逆时针转矩,此时躯块3、躯块4和躯块5呈拱起状态,拖动躯块6、躯块7前进。蛇形探测器拱起状态受力分析如图4所示。
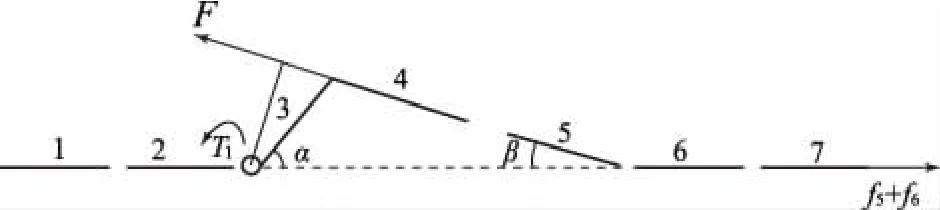
图4 蛇形探测器拱起状态受力示意图
要使蛇形探测器前进,躯块3上端必须产生拖动力F,所以躯块3中的电机必须产生摩擦阻力矩T1:


2.3 向前推进状态
与拱起状态原理类似,同时控制躯块3、躯块4和躯块6上的外壳旋转电机反方向旋转,由于各小爪处于后倾状态,躯块1和躯块2向前的阻力小于躯块6和躯块7向前的阻力,所以当躯块3、躯块4和躯块5回位时,可以推动躯块1、躯块2前进,如图5所示。
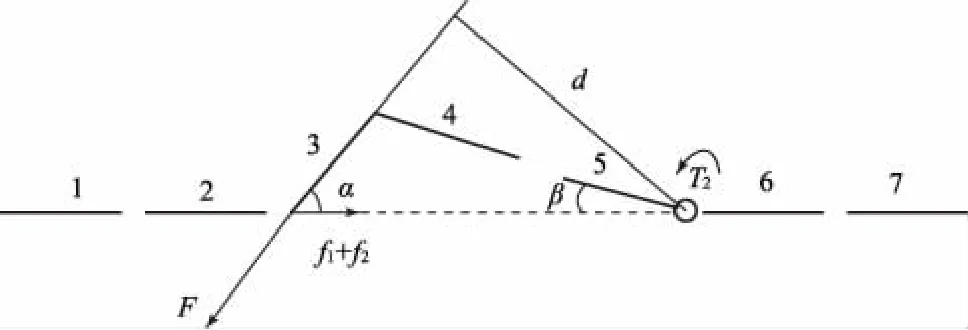
图5 蛇形探测器推进状态受力示意图
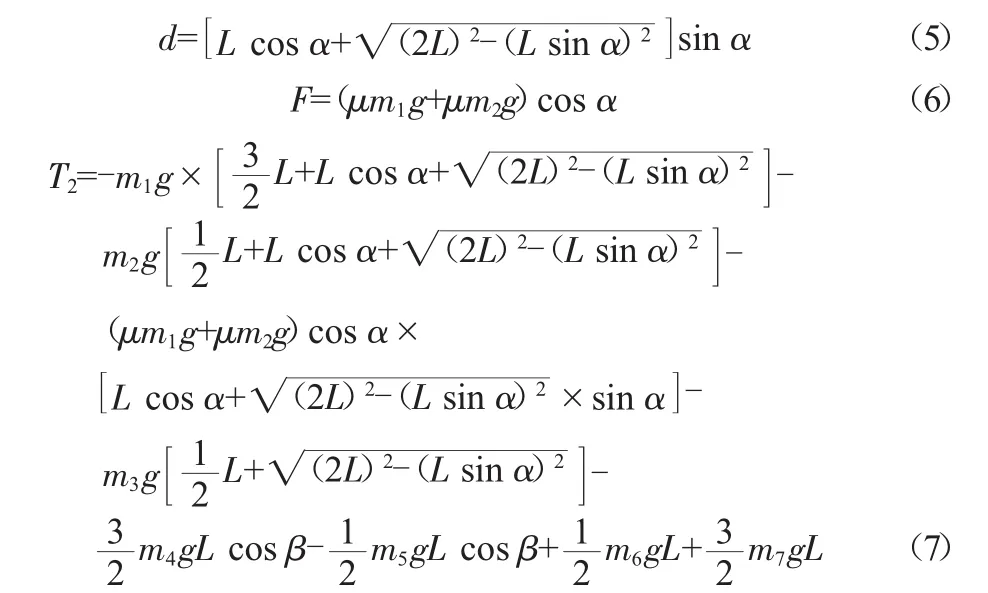
回位力矩T2的计算公式如下:
2.4 扭动状态
拱起状态是蛇形躯体垂直于水平面上下弯曲,而扭动状态是蛇形躯体在水平面弯曲。扭动状态时,各小爪也必须处于后倾状态,同时控制躯块3外壳旋转电机和外壳摆动电机以及躯块4和躯块6的外壳旋转电机,此时躯块1和躯块2向前的阻力小于躯块6和躯块7向前的阻力,所以当躯块3、躯块4和躯块5左右扭动时,实现2次前进动作。
上述4种运动状态的有机组合,结合小爪的前倾与后倾状态,可以实现蛇形探测器三维空间灵活进退运动。
3 蛇形探测器工作原理
3.1 探测功能
蛇形探测器除了具有三维运动特点外,还具有多项探测功能。可在蛇形探测器上安装多种传感器,如北斗定位模块、光敏传感器、声波传感器、红外传感器、微型摄像头等。探测器工作时以声波传感为主,在地下救援中若红外和声波信号同时显现时,探测器会自动进行主辅选择,优先以声波信号进行探测。另外,其装有生命探测装置,可感应人体所发出的超低频电场,找到被困人员的位置,可防错误识别其他生物发出的声音,影响救援速度。探测器上的红外测距传感器协助探测器躲避障碍,提高救援效率。探测器上的微型摄像头可以将废墟下的情况拍摄记录。探测器采用2.4 GHz无线网络技术与搜寻人员手持式终端进行通信,将救援情况传递给外部工作人员,实现人机交互,制定相应救援措施。
3.2 双向行进功能
废墟之中就像一个迷宫,蛇形探测器前行时容易把自己绕进去,所以采用双向行进方式,自动调节前行的角度,通过算法控制,蛇身拱起与回位,结合小爪前倾或后倾结构,完成向前推进或向后行进动作,避免了碰上死路而无法回头的状况。
蛇形探测器结合光敏传感器,在探测结束时可以根据微弱的光芒找到出口,无需担心探测器丢失。在漆黑的矿井,或者较深的废墟中没有光源指引时,探测器会根据自动记忆所有路线、双向移动功能引导设备安全返回。整个行进过程由蛇尾的电池模块带动电机作为驱动力。
4 应用前景
在“以人为本、科技强警”的现代化时代,救援过程就是与时间的竞赛。近年来多发的自然灾害,如地震、火灾、洪水,人为的恐怖活动、武力冲突,由生化病毒和有毒物质、辐射性物质等带来的灾害,威胁着人们的安全,如果仅靠人工救援,不仅延误了最佳的救援时间,还会造成无谓的人员伤亡。
本文设计的蛇形微型探测器,可以在灾难发生后,废墟下存在多种不确定因素,救援工作难以展开时,快速进入废墟罅隙进行生命体征和伤亡情况探测,不仅给救援人员争取了更多的时间,还使得被困人员多了一线生机。该蛇形微型探测器,具有较强的灵活性,能够适应多种复杂环境,可以在灾难救援工作中发挥重要作用。
