面向架空输电线路的小型无人机巡检起降平台设计
2018-09-22杨海威张益霖惠大新
耿 寒,杨海威,张益霖,惠大新
(1.国网辽源供电公司,吉林 辽源 136200;2.国网长春供电公司, 长春 130021)
随着电力需求的不断增长,相应的电网架结构日趋复杂,特别是开展特高压电网以及能源互联网的建设,使架空输电线路的规模不断增大。以人工或半自动线路巡检的传统方式不能满足当前输电线路的运行维护要求,基于无人机巡检输电线路受地形制约小,具有操作简单、塔头巡检效果好,巡检成本低等优点,和人工巡视形成了良性互补,提高了输电线路运行维护的覆盖能力。
随着无人机巡检输电线路应用的不断推进,强化无人机检测能力、完善巡检作业和安全飞行等系列课题的研究成果正不断丰富输电线路无人机巡检的技术,为电网安全稳定运行提供更大保证。文献[1]为使巡检无人机适合复杂环境,并提高巡视距离和安全性,结合多项技术,研发了一套大型无人机输电线路巡检系统。文献[2]应用现有的4种高效巡视方法,通过对4种巡视设备的应用比较,拟定了一套在上海市供电公司配电线路中应用的无人机巡检方案。文献[3-4]也分别说明了使用无人机进行输电线路巡检的合理性和有效性。无人机巡检作业信息应用方面,通常以无人机配置的传感器获取的影像资料为数据源,进行缺陷定位或故障诊断等方面的研究[5-7],提高了输电线路运行维护水平。
当前用于输电线路巡检作业的无人机多为小型无人机,针对个别极复杂地形进行输电线路状态巡检,采用多旋翼的垂直起降方式。在实际无人机巡检作业中,面临农田、河流等特殊地形,无人机在起降过程中容易发生倾覆、磕碰等。针对这一情况,亟待研发一种全地形的起降装置,该装置便于收放,并可以和无人机收纳装置结合,在各类地形上均能支持水平基面架设。
1 输电线路运行维护分析
输电线路的运行与维护是保障电网安全稳定运行工作的重要组成部分,为保障输电线路处于正常运行状况,及时发现和消除杆塔塔体、金具、其他附属设备以及线路保护区内出现的缺陷或隐患,同时为输电线路检修、运行维护等作业项目提供基础依据,需要组织运行维护人员对线路进行巡检,即人工巡视。根据工作内容的不同,可将巡视工作分为正常巡视、故障巡视、特殊巡视三类。
巡视内容可分为3部分:杆塔、附属设施、通道环境。杆塔需要检查的内容主要包括:基础、塔材、导线、绝缘子等部分;附属设施需要检查的内容主要包括:防雷装置、防鸟装置、各种监测装置、标志牌以及较小的金属构件;架空线路通道环境需要检查的内容为物体对导线的水平、垂直距离是否满足要求,是否有发生故障的隐患,如:树木、建筑物与导线的水平、垂直距离,线路保护区内有无危及线路安全的施工作业,易燃、易爆物堆积,漂浮物。
现阶段输电线路巡视工作主要以正常巡视、故障巡视、特殊巡视三种常规巡视方式为主,线路巡查人员以地面巡视为基本手段,并辅以带电登杆(塔)检查等。无人机的线路巡检作业中,小型无人机操作简单,成本低,可胜任杆塔、金具等附属设施、通道环境的巡检工作,被广泛应用。
输电线路的无人机巡视作业主要针对特定的区域进行巡检作业,该区域地形复杂,人工巡视困难,巡视结果难以符合工作要求。而在一些较复杂环境下运行的输电线路杆塔,无人机巡检作业也面临较多困难。
2 小型无人机巡检作业分析
2.1 无人机技术与人工巡视的差异性分析
采用无人机的输电线路巡视作业主要根据内置程序和地面遥控进行。巡视作业前,无人机操作人员需对待巡检对象、目的有初步了解,掌握巡检环境,确定巡检作业的全过程内容,保障飞行安全和稳定性,提高工作效率。同时,保证无人机操作人员的技术熟练程度,掌握机载仪器的情况,保证能够及时获得待查缺陷、故障的准确信息,使无人机巡线作业既能完成人工巡视可发现的缺陷、隐患,也能发现人工巡视难以发现的导线断股、异常放电等不可忽视的隐患。
无人机巡检作业较人工巡视的差异性主要体现在工作质量、工作效率和工作要求三方面。工作质量方面:人工巡检在地面以一定角度仰视杆塔塔头、导线等巡视对象,无人机可近距离观察,观察角度增大,细节分辨率更高;人工巡检会受到巡线员生理、心理等主观因素的影响,不能保证巡视质量,无人机巡视作业人力耗费水平低,有利于保障输电可靠性。工作效率方面:由于无人机的运行成本低,从保障供电可靠性角度,可安排多台无人机组协同进行全线路日常巡视和重点巡视,节省大部分人力,提高工作效率。工作要求:人工巡视可以适合任何情况下的工作环境,无人机巡检作业相对要求较高,需要一套从准备起飞到设备回收的全过程飞行保障措施。
2.2 无人机巡检作业的工作要求分析
确定使用无人机巡视后,即对无人机设备自身、巡检人员状态及天气状况和工作环境等因素进行检查,特殊情况制定相应的安全措施,保证无人机能顺利开展工作。无人机起飞时,根据无人机的质量选择合理的起飞方式,保证无人机可以稳定安全地进入到预定航线。完成预定巡检工作后无人机返航,地面巡检人员应最大限度地提前作好无人机准备降落区域的场地清障工作,保证无人机的安全稳定降落。无人机降落后,应检查各部件的状态,并进行简单的清洁和紧固工作,如有损坏和设备异常情况,应及时维修,最后对部件进行拆卸和装箱,核对设备清单,保证现场无遗漏后装车、入库,做最后一次核对,完成设备的回收工作。
当前无人机的工作环境大多在地理环境恶劣的线路走廊内,此时的巡检工作对人工巡检或是劳动强度过大,或是自然环境恶劣,亦或是人工巡检难以达到要求的检测精度。进行无人机巡检作业后,主要工作是如何避免恶劣环境下无人机发生事故。把无人机巡检作业分为起飞、高空巡检和返航降落3个工作阶段,降低无人机的起降难度会显著降低无人机的事故发生率,因此,设计先进的无人机起降平台尤为重要。
3 小型无人机起降平台的设计方案
3.1 适用于复杂环境的起降平台模型
恶劣的架空线路走廊通常是指高低不平的农田、面积较大的河流、垃圾堆放场等线路通道环境,小型无人机进行巡检作业时必须克服工作环境带来的不利影响,因此,起降平台必须最大程度地降低飞行难度,提高巡检工作质量,完成巡检工作任务。同时,在保证完成任务的基础上,要确保无人机不受到损坏,降低巡检作业成本,应对复杂起降环境时,起降平台的设计模型见图1。
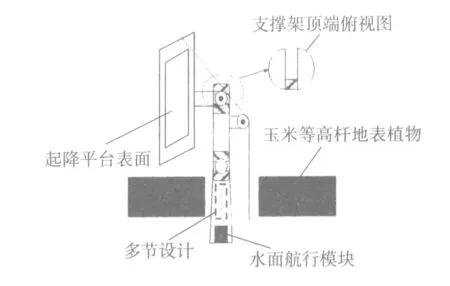
图1 复杂环境的起降平台模型
起降平台由平台表面和支撑架组装而成,平面可向外扩展,进而扩大无人机的起降范围。支撑架采用多节设计,可伸缩、拉长,灵活调节起降平台的高度,克服玉米等高杆植物给起降带来的困难。支撑架内设置各种功能模块,以便适应各种场景下的无人机起降,减少无人机事故发生。
3.2 作业环境为农田场景时的模型
农田是较为常见的输电线路走廊内的地形地貌,对于小型无人机而言,农田对无人机起降动作的影响主要体现在:无人机起降时,由于东北地区的农田主要设计为垄沟-垄台组合,因此高低不平的地表让无人机起降时极易发生倾覆事件,给设备(特别是旋翼)造成损坏。当起降环境是农田时,起降平台的设计模型见图2。
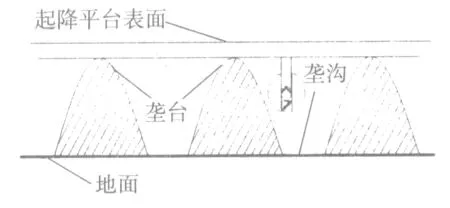
图2 农田的起降平台模型
无人机在起降平台上进行起降动作时,由于起降平台的表面平整光滑,帮助无人机克服了地表不平的不利因素,因此,可满足无人机安全起飞和平稳降落,减少无人机倾覆事件发生的概率。
3.3 作业环境为水面场景时的模型
当杆塔的基础在水里时,采用人工巡视较为复杂,无人机巡检既解决了巡线员难以靠近杆塔的困难,也提高了巡检的工作效率。考虑蓄电池的电量及高压线的电磁干扰,此时要解决的问题是无人机因向杆塔靠近和返航而损失的蓄电池电量,以及保证通信系统良好的实时性和较高的可靠性,避免飞行距离过长造成无人机坠机落水和误操作而过于靠近高压线产生危险。当起降环境是水面时,起降平台的设计模型见图3。
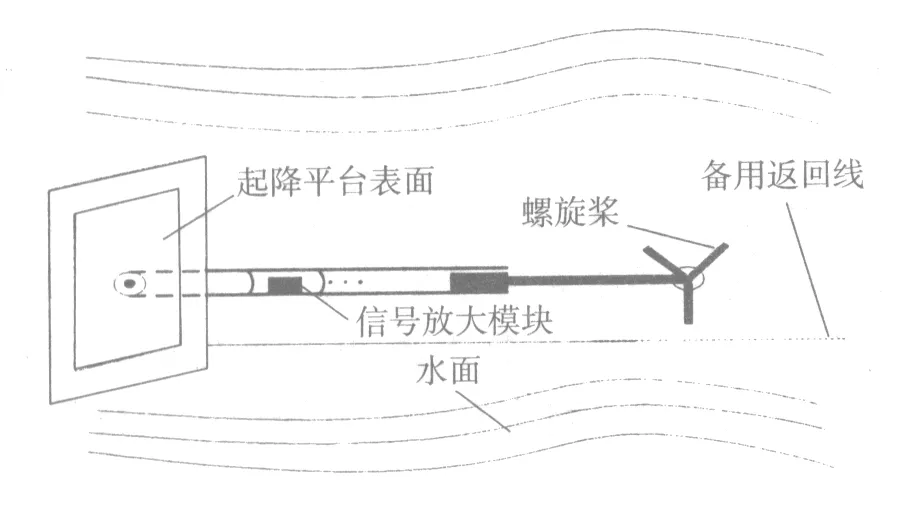
图3 水面的起降平台模型
起降平台的材料采用密度低于水密度的合金材料,以便让平台的浮力大于自身重力进而可漂浮在水面上。当起降平台携带无人机靠近水中杆塔时,无人机在起降平台上起降,减少了飞向水中杆塔所消耗的电量,也减少了无人机返航时的耗电量。支撑架内置信号放大模块,保证准确、及时地传输巡检信息和无人机的控制信息。通过上述两种途径降低坠机事件发生的概率。
4 结论
本文讨论了小型无人机用于输电线路巡检时较人工巡检的优势,同时分析了无人机在起降时面临的困难,提出了为无人机设计起降平台的方案。通过分析各种复杂地形给无人机起降带来的困难,设计了适用于面向东北地区的多种地形的无人机起降平台,提高了输电线路巡检效率,保障无人机的安全飞行。
