基于安卓平台的增强现实导航系统设计
2018-09-20边根庆田飞腾
边根庆 田飞腾

摘要:文章借助安卓手机传感器、位置服务、图像识别和OpenGL ES等技术,设计并实现一个基于安卓平台的增强现实导航系统,通过增强现实技术实现虚拟导航信息渲染,通过图片识别技术实现建筑物识别,改善用户交互体验。
关键词:增强现实;手机导航;OpenGL ES; ORB算法;图像识别
随着社会的不断进步,人们对导航的需求越来越强烈。目前大多数智能手机上的导航软件都是以2D或3D形式提供导航服务,但这些都是通过矢量数据来提供地图导航,没有充分发挥智能手机上多传感器等特性,用户体验性差。所有信息都是以屏幕为中心进行展示,没有与真实世界更好地融合。用户需要首先判断手机相对于大地坐标系的方位朝向,然后观察手机的导航信息,按照手机提示的信息进行导航。这种传统的方式已经不能满足用户需求,尤其是被称为“路痴”的那些用户。因此,本系统将在手机导航系统中添加更多的路径参考元素,让使用的人在行走的同时可以看到增强现实的场景就在眼前,让原本陌生的街道在打开本系统的时候变得熟悉。
同时,增强现实技术的发展越来越火热,在很多领域崭露头角。增强现实技术具有很广阔的适用性,在军事、旅游、娱乐、医疗等领域都有很多的应用软件。随着移动互联网的普及,移动增强现实技术也有了长足的发展。
因此,本文结合智能手机内置传感器,基于现有的位置服务、增强现实技术、图像识别技术,改善现有的导航系统,设计和实现了一款基于安卓平台的增强现实导航系统,提供了更好的导航体验。
1 核心技术研究
本章主要是对增强现实导航系统的两个核心技术进行研究。针对改善现有导航体验,提出一种基于传感器移动增强现实技术的POI展示方法;为实现对建筑物图像的识别,提出一种基于ORB 算法(Oriented FAST and Rotated Brief)和位置信息的建筑物识别方法。
1.1 一种基于传感器移动增强现实技术的POI展示方法
本论文研究并提出了一种基于传感器移动增强现实技术实现的POI展示方法,将通过百度地图API获取的周边POI信息,将POI信息以标签的形式按照相应的空间位置,渲染到通过手机摄像头获取的视频流上。具体如图1所示。
该方法解决的是如何实时地计算增强现实图形在屏幕View坐标系上的位置。具体分为4步:(1)获取标签的x轴坐标初始值。(2)获取标签的y轴坐标的初始值。(3)根据手机倾斜角度调整标签在两个坐标轴上的坐标。(4)根据POI标签位置优化方法确定坐标的最终值。
最终根据前面的映射关系将POI标签渲染到通过手机摄像头获取的视频流上,实现虚实融合。当手机传感器信息发生变化时,重新计算映射关系,进而重新对标签进行渲染。
1.2 —种基于ORB算法和位置服务的建筑物识别方法
本文提出建筑物识别是基于特征的图像识别算法,由于在对建筑物识别的过程中,存在很大的外界干扰,包括视角变化、遮挡以及光照等。而且本文系统是应用在智能手机平台上,在硬件性能方面有一定的限制,本文最终选取ORB算法作为特征点检测匹配算法。
由于实际情况下建筑物都是在固定位置拥有位置信息这个属性,因此可以先获取用户的位置信息,并通过位置信息筛选出用户附近的建筑物,缩小匹配范围,提高建筑物识别效率。
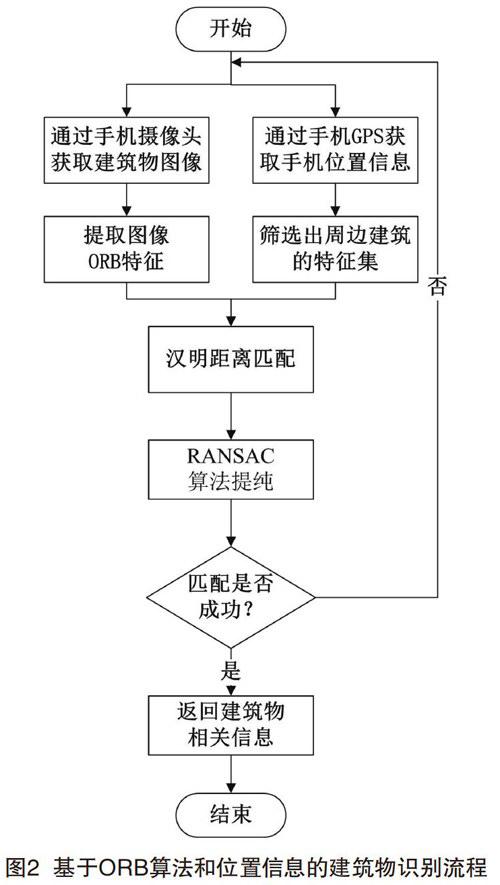
如图2所示,建筑物识别方法的步骤如下:
(1)首先通过手机摄像头获取到建筑物的图像,通过OpenCV库用ORB算法进行特征点提取,获取目标建筑特征点。
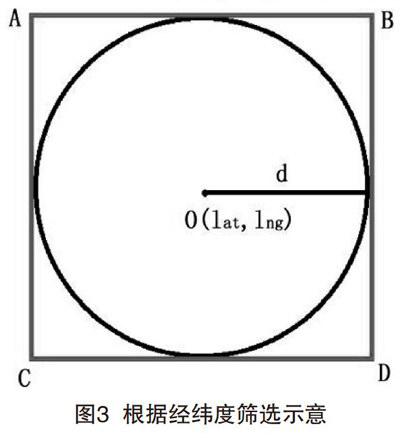
(2)通过手机获得经纬度信息,就据经纬度信息筛选出周围50 m范围内的建筑物信息,具体思路如图3所示,首先以经纬度信息0(lat,lng)为圆心,以^的半径计算出一个圆,然后计算出该圆形的正切正方形4个顶点(A,B,C,D)。最后以正方形的4个顶点为筛选条件从数据库中选出符合条件的建筑物。
其正切正方形详细计算步骤如下:
(3)根据前面选出符合条件的建筑物,在特征集库中选出相应特征集,将这些特征集与步骤(1)中获取的特征点通过汉明距离进行匹配,然后通过RANSAC算法提纯,最终选出识别成功的建筑物,并从资源库中提取相关说明信息。
2 增强显示导航系统设计
本系统包括3个模块:POI展示模块、导航模块和建筑物识别模块。下面将分模块对系统进行设计,并在最后给出系统的运行效果图。
2.1 POI展示模块设计
本模块包括POI标签显示、POI搜索筛选和雷达图显示。本模块的核心是POI标签显示,为用户展示周围的POI信息,包括距离、方位、名称、POI类型等信息,POI标签根据手机朝向和位置信息发生改变时而改变,以达到增强现实的效果。
2.2 导航模块设计
本模块的核心设计是导航路径数据在OpenGL ES的3D坐标系上的映射方法。它给用户提供了直观的到达POI的导航路径图形,包括实时调整当前位置与前方路口的距离以及用图形展示出转弯指示信息。其存在问题是如何直观地展示导航路径信息,与POI展示模块不同,由于本模块不存在密集和遮挡的问题,因此可以更直观地展示。
本模块解决的是如何实时地计算增强现实图形在OpenGL ES的坐标系上的位置,从而渲染到手机屏幕上的相应位置。通过百度地图API获取相应的导航数据,根据导航信息生成相应3D指示箭头,并通过视点变换实时调整图形的位置,就能保证较好的增强现实效果。
另外,由于随着用户行走过程中位置的不断变化,手机屏幕上的导航信息也要跟着实时刷新,从而更新导航路径数据在OpenGL ES 3D坐标系上的位置。
2.3 建筑物识别模块设计
本模块的核心设计是通过图像识别技术识别出建筑物,通过手机摄像头获取建筑物的图片,并与数据库中的建筑物特征点集进行匹配,成功后返回相關信息。
本模塊解决的是如何高效准确地识别建筑物。为此,通过手机获取用户位置信息进行筛选,建筑物识别时只匹配用户周边的建筑物,缩小了匹配范围,极大地提高识别效率和准确度。
2.4 增强显示导航系统展示
打开导航系统,首先,进入POI展示界面如图4(a)所示。点击底部菜单栏上的导航按钮即可进入导航模块界面,图4(b)为实景导航效果图。点击菜单栏上的建筑物识别按钮,即可进入建筑物识别模块如图4(c)所示,点击识别按钮即可进行建筑物识别。
3 结语
伴随着社会的发展,人们对导航的需求越来越强烈。本文设计一种增强现实导航系统,该系统采用基于传感器的增强现实技术,借助手机的方向传感器和磁力计、百度定位和导航SDK提供的位置信息,并在OpenGL ES 3D渲染技术和图像识别技术的基础上实现了增强现实导航的效果,并加入了建筑物识别模块,在Android手机上实现了更直观的导航表现。
[参考文献]
[1]郑菲菲,宋丽红,董静.基于增强现实技术的导航系统研究[J].软件导刊,2016(9):57-59.
[2]EIVIND G.Augmented reality and object tracking for mobile devices[D].Norway:Norwegian University, 2012.
[3]雷正龙.基于Android的增强现实技术在旅游体验中的应用研究[D].北京:北京工业大学,2015.
[4]KAHARI M, MURPHY D J.Mara:sensor based augmented reality system for mobile imaging device[C].Nantes:The 5th IEEE andACM International Symposyum on Mixed and Augmented Reality, 2006.
[5]RUBLEE E, RABAUD V, KONOLIGE K, et al.ORB:an efficient alternative to SIFT orSURF[C].Washington:IEEE InternationalConference on Computer Version(ICCV), 2011:2564-2571.
[6]GOODSTEIN L.Location based service:analysis of carrier spending, subscribers, devices and applications for handset-based andtelematics services[J].ABI Research, 2004(5):15-19.
[7]舒丽霞,周成平,彭晓明,等.基于Hausdorff距离图象配准方法研究[J].中国图象图形学报,2005(12):1412-1417.
[8]VIOLA P, WELLS III W MAlignment by maximization of mutual information[J].International Journal of Computer Vision, 1997(2):137-154.
[9]王亚美,鲁田.基于OpenGLES的二三维地图可视化客户端设计与实现[J].计算机应用与软件,2013(9):77-80.
