数字随动系统与模拟随动系统的仿真
2018-09-20宋暖程继航马骋沈洋
宋暖,程继航,马骋,沈洋
(空军航空大学,吉林长春,130021)
0 引言
数字随动系统是一个由计算机控制的位置随动系统。随动系统作为闭环自动控制系统,它在对生产过程和运动对象的控制中,以及在瞄准,跟踪,信号传递和接收等装置中,都占有显著地位。虽然随动系统所解决的问题的特点不尽相同,但它们有一个共性,就是对随意变化的输入过程都能完成其复现功能。
数字控制在理论上是连续控制的延伸。对于一个实际的控制系统,元件的物理实现在很大程度上限制了它不能达到理想系统能够达到的性能。随着数字计算机的发展,它作为计算装置,一般情况下使得控制更精确,但运算速度受到限制。然而,在现代空间探索的成就中,结果表明,精度是关键因素。在数字控制系统的实现中计算机起着很重要的作用,微处理机,微型计算机以及它们用作为控制元件的进展,已经成了一种推动力。不仅提高了对这些系统的理论分析和综合方法,而且使得设计的控制系统更接近于理想系统的性能。
系统仿真是自动化领域的一个重要分支,为了设计出一个品质优良的控制系统,首先要对系统进行分析和试验,系统仿真是用计算机分析和设计系统的一种既安全又经经济的实验方法。系统仿真技术已广泛的应用于航空,航天,船舶,军工,冶金,电力,化工以及交通管制等各个部门和科研上。随着计算机的普及,系统仿真,尤其是数字仿真,越来越普遍地用于工程设计,研究,教育,操纵人员的训练及系统试验等各个方面,并取得了十分明显的效益。
1 模拟随动系统的仿真

图1 小功率模拟随动系统动态结构图
选取一小功率模拟随动系统,系统地框图如图1所示。已知系统参数设置为:T1= 0 .01,T2= 0 .05,K0=1,K1= 3 00,K2=1,Kc= 0 .08。当系统输入分别为 θsr=1(t)和θsr=t时,对系统进行仿真,仿真结果如图2所示。
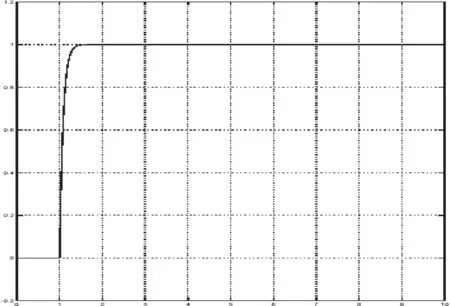
2(a) 输入为 θ sr ( t) = 1 (t)时的模拟随动系统仿真波形

图2 模拟随动系统的仿真
2 数字随动系统的仿真
选取与模拟随动系统一致的小功率数字随动系统,系统框图如图3所示。已知参数设置为:
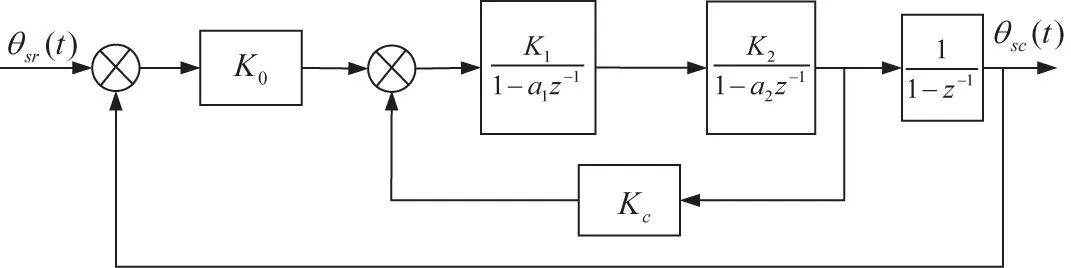
图3 小功率数字随动系统动态结构图
(1)当系统输入为 θsr( t) = 1 (t)时,K0=1,K1=30000,K2=20,Kc= 0 .08,a1= 1 00,a2= 2 0,对系统进行仿真。(2)当系统输入为θsr=t时,K0=1,K1=30000,Kc= 0 .04,a1= 1 00,a2= 2 0,对系统进行仿真。
仿真结果如图4所示。
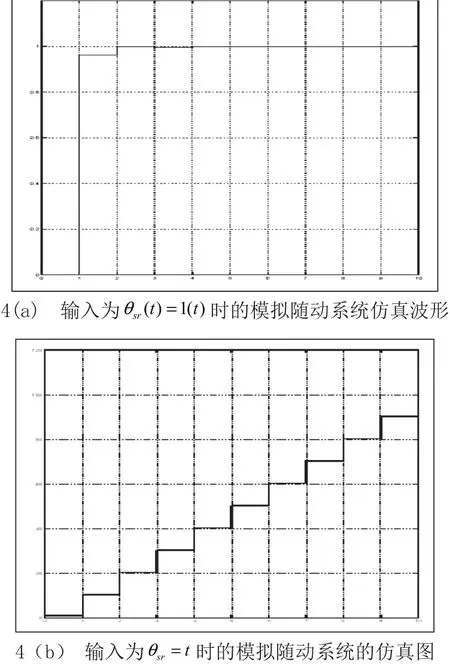
图4 数字随动系统的仿真波形
3 数字随动系统与模拟随动系统的比较
模拟随动系统是以反馈控制理论为基础,由模拟电子电路构成控制器,因而存在如下的主要弱点:有运算放大器构成的PID调节器,其参数一经设定,不易经常调整,对工况的变化和对象的变化自适应能力差;模拟控制器很难实现高级的控制策略和控制方法,难以实现对交流电机这样复杂对象的控制;受成本的限制,对反馈量的模拟电路检测精度不高,因而控制精度也不易提高;用模拟期间构成的控制电路集成度不高,硬件复杂,可靠性低,可重复性差。
以微处理器为核心的数字随动系统,不仅克服了上述连续控制的弱点,而且可以实现原模拟控制不可想象的高复杂程度、高精度的控制,为运动控制注入了新的活力,并将其推向更高的发展阶段。
归纳数字随动系统的主要特点如下:数字控制随动系统集成度高,只需改变控制算法软件即可,可以实现统一控制器即可控制直流电机又可控制交流电机;数字控制器的输入输出通道可以可以实现控制量的模拟输出,具有数据采集速度快、值域范围宽、分辨率高、精度高等特点,为实现高性能的运算控制系统打下了基础;采用高速数字信号处理器为控制器,可以实现复杂的高性能的运动控制策略和方法,如矢量控制、多变量模糊控制等。由于软件的灵活性,可以尽可能充分地实现人工智能,更好地适应控制系统的复杂多变;借助一些人机界面设备(如与处理器相连的是液晶显示屏、控制面板、触摸屏等)实现对系统进行运行状态的监控、预警、故障诊断等功能;借助处理器的通讯能力实现于上位机的通讯;借助现场总线技术实现底层控制设备的联网;因而更方便地实现高复杂度的多机协同工作。单个电机的数字控制系统只是一条生产线或一个车间集散控制系统或分布控制系统(DCS)中的一个点或一个控制回路,它是复杂的控制系统、网络控制、远程监控的对象。
从仿真结果可以看出数字随动系统是完全可以取代模拟式随动系统的,而且其使用也优于模拟式随动系统。
