核电厂智能型电动执行机构故障的在线处理
2018-09-20曹祖庭孙震啸郭向东卢金帆
李 佳,曹祖庭,孙震啸,郭向东,卢金帆
(中核核电运行管理有限公司,浙江 海盐 314300)
0 引言
随着电子科技的迅速发展,智能型电动执行机构的发展越来越迅速,应用范围也越来越广泛。按品牌划分,目前核电厂广泛使用的智能型电动执行机构品牌主要有Limitorque,Bernard,Rotork以及SND等。智能型电动执行机构主要由以下部分组成:电子行程控制器、力矩传感器、电源模块、主控板、人机界面模块等。
1 智能型电动执行机构的组成
以下以常州电站辅机股份有限公司的SND智能型电动执行机构为例,对其结构进行说明。
1.1 电子行程控制器
SND智能型执行机构采用一个16位的绝对编码式电子行程控制器,在运行过程中输出轴带动行程控制器转动,行程控制器通过光电转换将阀位转换成绝对编码(格雷码),再将绝对编码信号通过专用微型控制器上的输入点传送给专用微型控制器。该执行机构采用绝对编码技术,在全行程的任何一个位置对应的行程值均为唯一值,使阀门定位更加精确;并且在断电状态下,手动操作执行机构仍能保持数据与实际行程的一致性,具有断电记忆功能。
电子行程控制器实物如图1所示。
图1 电子行程控制器实物
1.2 力矩传感器
力矩传感器的实现采用了电阻应变计原理。在应变计的电测技术中,应用最广泛的测量电路是惠斯顿(Wheatstone)电桥电路。测量电桥由于具有灵敏度高、测量范围宽、电路结构简单、精度高、容易实现温度补偿等优点,因此能很好地满足应变测量的要求。
1.3 电源模块
执行机构通过三相桥式整流电路获得2路相互隔离的24 V直流电源,一路用于内部控制系统,输出功率为12 W,主要是用于对专用微型控制器和人机界面的供电;另一路输出功率为3 W,用于对4—20 mA阀位反馈、远控信号和Modbus-RTU供电。
电源模块如图2所示。
图2 电源模块实物
1.4 主控板
主控板是智能型电动执行机构的控制核心,所有输入信号的采集、控制逻辑的运算、控制命令的输出和状态报警信号的反馈都要通过它来完成。其完成的主要功能有:与人机界面的通信、电子行程和电子力矩的采集、电机过热故障的判断、远程开关量控制的接收、电动执行机构状态信号的发出、电机正反转运行的控制等。
1.5 人际界面模块
人机界面模块是人机对话的窗口,用户可通过它对执行机构进行现场操作、参数设置和状态监控。
2 智能型电动执行机构常见缺陷及处理
核电厂工作现场温度高,各种设备振动大,电磁干扰严重,且智能型电动执行机构自身电子元器件较多,导致智能型电动执行机构在现场的故障率较高,尤其是在运行的前期及后期。按专业划分,智能型电动执行机构的缺陷主要可分为如下几类,不同的缺陷类型应采取不同的处理方式。
2.1 机械缺陷
机械缺陷主要是指智能型电动执行机构机械传动部件的缺陷,主要包括机械部件连接松动、卡涩,元器件磨损以及密封失效等。这类故障的处理只能通过更换相关元器件或重新拆装等方式完成;处理过程中必须将对应的阀门完全隔离,且允许对执行机构进行开关、操作。此类问题在电厂调试期间以及设备运行初期和后期较多。
2.2 外部工况缺陷
外部工况缺陷主要是由于外部工况的变化而引起的执行机构动作异常,主要包括执行机构所在管网介质压力的变化、远控信号的逻辑闭锁等。处理此类缺陷一方面要考虑执行机构的设置问题,也要考虑运行人员的操作问题,比如开、关过紧造成过力矩,操作造成外部控制指令闭锁问题。此外,还需要考虑执行机构同阀门的匹配问题,有无选型偏小的情况。此类问题在电厂调试期间出现较多,正式运行之后出现很少。
2.3 内部元器件缺陷
内部元器件缺陷主要是指由于执行机构内部各电气相关元器件存在问题造成的执行机构不可用。较传统式的执行机构而言,智能型电动执行机构内部电子元件较多,且现场工况比较恶劣,环境温度、机械振动、电磁干扰等均对它有较大的影响。此类故障主要有:主控板故障黑屏、花屏;现场旋钮失灵,无输出反馈;接线松动;主控板PLC死机,通信接口损坏;电源模块过热烧毁;行程传感器故障造成行程跳动,无法正常显示;旋钮被磁化造成人机界面不可用等。对智能型电动执行机构来说,此类故障最多,大约可占到日常缺陷的80 %以上。由于产品的生产厂家不同,可能出现的故障信息也各不相同,但是按部件来说,总体上可分为:执行机构拒动或者误动;阀位同实际阀位显示不一致;执行机构人机界面黑屏;上送信号出现误报;各类异常报警等。
对于上述缺陷导致的故障,少部分可以通过断电复位、还原设置以及内部接线重新拔插加以解决,更多的还是需要进行传统的隔离更换处理。即先将执行机构所在的管道系统隔离,再对执行机构进行动作。由于缺陷处理工作涉及管道的隔离以及执行机构的开、关操作等,故从发现问题到解决问题,整个处理过程一般需要1—2天时间。即使紧急处理,也需3 h以上才能完成。由于工况限制,核电厂某些阀门在运行期间不允许操作,想要处理这些阀门的缺陷,就需等待合适工况。这不仅延长了缺陷处理的时间,而且相关管道系统带病运行也给核电厂的安全稳定运行带来很大隐患。
3 智能型电动执行机构故障的在线处理
某核电厂通过对智能电动执行机构的结构研究以及对现场大量消缺试验的总结归纳,找到了一些不同于传统的故障处理方式,即通过在线设置和更换的方式,直接处理执行机构电气类的故障缺陷。在整个处理过程中,不涉及管道的隔离和执行机构的操作,给现场工作带来了很大便利。由于电气类缺陷在现场缺陷中的占比较大,该方式可解决电厂日常运行中的很大一部分问题。
以下结合实例,详细地阐述智能型电动执行机构故障在线处理的基本理念和具体措施。
3.1 行程控制器故障在线处理
2015年1月,某核电厂智能型电动执行机构4ARE056VL二次触发报警,就地检查故障显示为行程控制器编码器故障。通过现场断电复位消除了报警,但是该隐患依旧存在。为彻底解决这一问题,需要对编码器进行更换。由于受机组运行工况限制,阀门不允许动作,故只能对其进行在线更换。
执行机构阀位的设定值储存在主板中,假设编码器的量程范围是0—c,阀门设定的关阀位值为a,开阀位值为b。在不考虑溢出的情况下(溢出时,只需要主板程序内部补充相关算法即可),设定值满足如下关系:0<a<b<c。
对于不同编码器,其结构、原理及监测阀位变化的方式是一致的,只是内部齿轮位置以及反馈的阀门二进制代码不一样。针对现场的编码器,如果一个新编码器内部齿轮的位置即反馈阀位的二进制代码,与现场的编码器一样,则可以直接更换,不需重新设定阀位,即不需要操作执行机构动作阀门。行程控制器的阀位值设定如图3所示。

图3 行程控制器的阀位值设定
由于新编码器内部齿轮的位置以及反馈的二进制代码是未知的,假设反馈的二进制代码数值为d,d的大小相对于前面假设的a,b,c的数值,有3种可能:
(1) 当0<d<a时,更换新的编码器后,阀位显示为0(全关);
(2) 当a<d<b时,更换新的编码器后,阀位显示为0—100 %中的某个数值(中间位置);
(3) 当b<d<c时,更换新的编码器后,阀位显示为100 %(全开)。
经核实,该现场阀门处于开度100 %的全开位置,更换新的编码器时只要确保其阀位也在100 %位置即可。新编码器的参数可在线修改完成,具体步骤如下:
(1) 将执行机构置于就地“停止”位置,并断开上游380 V动力电源开关,打开控制部件端盖;
(2) 拆除原有编码器接线,将新编码器的接线插到主板上;
(3) 对执行机构重新上电,观察新编码器的阀位显示;
(4) 若阀位显示为0,用螺丝刀或内六角逆时针旋转(不同厂家可能旋转方向不同)编码器,直到阀门刚好显示为100 %;若阀位显示在0—100 %的中间位置,用上述方法旋转编码器,直到阀门刚好显示为100 %;若阀位显示为100 %,用上述方法旋转编码器,直到阀位脱落全开位,再逆时针旋转编码器,直到阀门刚好显示为100 %;
(5) 用固定卡固定新编码器的齿轮位置;
(6) 再次断开执行机构上游电源,拆除旧的编码器,并用固定卡固定旧编码的齿轮位置;
(7) 安装新的编码器,恢复相关接线及控制部件端盖;
(8) 再次对执行机构进行上电,检查阀门状态,确认阀位显示为100 %位置,否则需要再次进行上述调整。
经过处理,该执行机构故障消除,各项功能恢复正常。
3.2 力矩传感器故障在线处理
若力矩数据储存在主板中,则直接更换力矩传感器即可;若力矩传感器嵌入了数据存储装置,则需要对其进行在线设置,设置的思路参考行程控制器的设置。
3.3 电源模块故障在线处理
电源模块主要用于给执行机构提供动力电源和控制电源,大部分电动执行机构的设置和参数均保存在主控板或人机界面模块中,故一般情况下电源模块可直接更换。但因一些继电器的状态没有自保持功能,失电后其输出状态会发生反转,所以需考虑电源模块失电后外部输出继电器的状态。
3.4 主控板和人机界面模块故障在线处理
智能型电动执行机构的主要设置和参数均储存在主控板或人机界面模块中,部分厂家和型号的执行机构中这2部分是合二为一的,故以下将其统一考虑。
2016-05-23,4CET012VV智能型电动执行机构由于操作失误,导致就地的开、关阀位值重置为相同值,执行机构上全开和全关指示灯均亮起,执行机构无法动作,判定为主控板故障。此时,电脑与执行机构无法建立通信连接,故不能读取主控板中的参数。因此,需要先确定阀位值。根据运行人员反馈,现场阀位真实开度为10 %左右。
参考同型设备的行程参数及之前备份的数据对其进行阀位设定,确定该执行机构的需整定的目标阀门行程D。
假设执行机构的当前阀位值为d,阀门关阀位值为a,开阀位值为b,结合当前阀门10 %的实际开度,可计算出执行机构的阀位值如下:
关阀位值:a=d-D×10 %;
开阀位值:b=d+D×90 %。
由于D并非为当前阀门的实际行程,10 %开度也仅仅为运行人员初步测量,以此为基准计算得出的阀位值可能存在一定的误差,依此整定可能会导致阀门开关不到位或过力矩报警。
经同运行人员进行交流得知,运行期间该阀门需置于全关位置;执行机构对关位有很高的要求,而对开位则要求不高,只要开度大于全开阀位的50 %即可。为确保执行机构在接收到关阀指令后,阀门能够关到位,且开阀过程中不会触发力矩保护,故需对执行机构的上述开、关阀位定值a,b进行保守计算,重新计算如下:
关阀位值:a=d-2×D×10 %;
开阀位值:b=d+D×50 %。
在关阀时,将关行程继续向关方向移动触发力矩保护,使执行机构通过力矩关动作来确保阀门关到位;在开阀时,不需100 %到位,但也能保证有50 %以上的开度。阀位值的计算示意如图4所示。
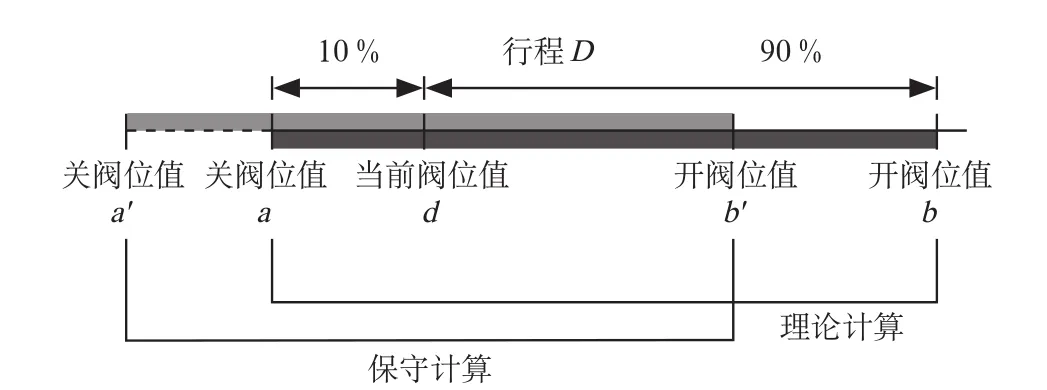
图4 阀位值的计算示意
将新主控板装入执行机构,使用电脑与执行机构建立通信连接,通过电脑专用软件将计算得出的开关阀位值写入新主控板内,即可完成对执行机构的整定,并确保在日常运行中阀门的可靠关闭。
4 故障在线处理的注意事项
在线处理执行机构故障的过程中,由于涉及带电操作,故在整个工作过程中需要特别注意安全,避免人因造成设备问题。
(1) 在线更换的宗旨是保持阀门的当前状态,故在对执行机构故障处理的过程中,必须保证全过程中阀门的位置不变,为此需对执行机构做好隔离。隔离方法如下:
① 就地选择开关置于“停止”位,以防阀门误操作;
② 根据实际工作需要将其动作电源断开;
③ 执行机构的反馈点存在外部48 V直流电源,在工作中需考虑其影响;
④ 根据需要在阀杆上增加夹具,锁定阀门的当前位置。
(2) 使用万用表时,严禁使用电阻档位,防止开阀或关阀信号接通,从而造成误开或误关阀门。
(3) 电子元件可能存在干扰问题,这给执行机构动作带来不确定性。根据需要在重要场合安排专人在电动执行机构上游动力电源处进行监护,并同运行操作人员保持全程联系,以便应对异常和极端工况。
5 结束语
由于工况不同且生产厂家各异,在实际工作中智能型电动执行机构故障种类繁多,因此上述在线缺陷处理方式也存在一定的局限性:
(1) 只能针对电气元件的缺陷来处理,而且在处理的过程中还存在一些小的问题,如对关阀要求高的阀门难以做到对开阀的高要求;
(2) 对执行机构自身的要求也较高,需要生产厂家预留足够的通信接口,开发配套的监控软件等;
(3) 需要前期对电动头的相关数据进行备份,同时故障处理工作必须由具有大量缺陷处理经验的人员来执行。
为此,核电检修工作者必须与时俱进,归纳总结,创造出更多、更好、更实用的现场缺陷处理方法和理论,确保核电厂更加安全有效运行。
