反无人机射频前端设计
2018-09-19石伯翔
石伯翔
(西安电子工程研究所,陕西西安,710010)
引言
无人机技术的日渐成熟,其应用领域也愈发广泛,与此同时带来了严重的安防问题。雷达探测由于不受环境、天气变化影响等优点,是无人机探测的一种主要手段。但由于无人机飞行高度低、速度慢、目标小,对雷达系统构成了与传统雷达要解决问题的巨大差异[1],同时由于无人机对于探测雷达大多数情况下处于近距离工作,无人机的任意方向移动能力,形成了目标弧度角的快速变化,对雷达波束的快速跟踪又构成成了较大的挑战。对于无人机这种“低、小、慢”的探测,波束要求兼具长的驻留时间和指向快速变化的能力。常见的波束扫描方式有机械扫描和相控扫描,机械扫描成本低,但波束扫描速度慢;相控扫可以实现波束的快速扫描,但是成本高[2]。针对这两种波束扫描方式的特点,本文提出了一种低成本的全电控阵列前端方案,该方案具备波束快速扫描的能力,同时也具备低成本的特点。
1 射频前端总体方案
无人机探测系统具有主动探测和被动探测两种工作模式。在被动接收探测模式下,无人机探测系统主要接收无人机的遥控信号,通过对无人机发出信号的探测,确定无人的位置。在被动探测状态,系统需要方位维360°同时接收信号的能力以及俯仰维波束的能力。在主动探测模式下,系统工作原理与常规雷达相同。主动工作模式主要应对夜间、大雾、以及被动探测失效的状态。
该射频前端为无人机探测雷达系统提供信号输入。全电控阵列射频前端系统构成如图 1所示。该系统天线采用收发分置方式,整个射频前端由共形阵列天线、俯仰维模拟多波束网络、下变频接收模块、校准网络、发射天线和北斗天线构成。
在被动探接收探测模式下,接收天线阵列在俯仰维形成覆盖探测空域的波束,在方位维,通过多通道下变频模块为方位为实现数字DBF功能提供多路中频输出。俯仰维波束选择通过射频开关控制实现,方位维波束由数字波束形成产生,从而形成一个可高速波束切换的全电控射频前端。在主动探测模式下,系统工作原理与常规雷达相同,此时需要发射天线向外发射信号,通过接收目标的回波信号完成探测定位功能,发射天线采用了低成本的套筒形式单极子天线,发射天为全向型天线。全向的发射天线与方位维的DBF接收体系相结合,实现方位 360°的全覆盖。同时,该射频前端还集成了北斗定位天线,为系统提供北斗定位信号。

图1 系统原理图
2 天线单元
2.1 发射天线单元
在主动探测模式下,该系统向外发射信号,通过接收目标的回波信号完成对目标的探测定位。系统采用套筒式单极子天线作为发射天线[3],其具有以下优势:1、单极子子天线是典型的全向天线,具有良好的辐射特性,结构简单,重量轻,成本低;2、相比于机械扫描天线和相控阵天线,其在形成全向波束的同时,无需伺服系统和馈电网络,从而可以达到简化系统结构、降低成本的目的。
2.2 北斗天线单元
为了完成对无人机的定位,本系统需要对自身进行定位。北斗二代卫星导航系统采用“无源工作方式”,用户只需要接收卫星信号便可完成导航定位。该系统工作于L波段并可兼容GPS和Galileo等系统[4]。该方案采用北斗天线作为系统定位天线,北斗天线工作频段BD2 B1/GPS L1,极化方式右旋圆极化。
3 接收天线阵列
由本系统要求的波束覆盖范围较大,传统平面阵不能满足需求。共形阵[5]在一定程度上可以克服平面阵的缺点,由于阵列在结构上具有与载体共形这一特点,导致波束扫描角比平面阵大,这是本系统采用共形阵列的一个主要原因。本系统采用锥台结构,方位维通过控制电路(开关矩阵或者数字波束形成)可以完成360°波束扫描;由于锥台阵存在一定的倾角,故俯仰维有更大的扫描范围。
该系统接收天线单元采用圆极化微带天线[6]。原因有以下两点,第一,微带天线具有低剖面、体积小、重量轻等特点,适合作为共形阵天线单元;第二,无人机探测雷达兼顾主被动探测模式,在被动探测情况下,由于不明确被探测目标发射电磁波的极化形式,采用圆极化接收天线可以克服极化失配的问题,保证可以接收到被探测目标的信号。
4 下变频接收模块
下变频接收模块的作用是为数字处理器提供方位维波束合成的中频信号[7]。经分析,该下变频模块包括下变频接收通道和校准网络。下变频通道对阵列俯仰维子阵接收到的信号进行放大、滤波、下变频得到中频信号。校准网络的作用是对各个接收通道进行幅相校准,以确保后端数字处理器可以准确合成波束。下变频模块原理如图2所示。

图2 下变频模块原理图
4.1 下变频接收通道
接收通道采用一次下变频结构,通过对信号进行滤波、放大下变频后得到相应的中频信号。该下变频模块输入信号频率为2.4GHz到2.483GHz跳频信号,跳频步进为 10MHz,根据后端 AD采样要求,输出中频信号频率为70MHz,中频带宽14MHz。设计下变频接收通道时要注意以下几点。
(1)外界干扰信号。首先输入频率在2.4GHz附近,这一频段外界干扰信号比较多,需要在前端采用预选滤波器对干扰信号进行抑制;其次,一次下变频结构中存在的一个重要问题是镜像干扰,镜像频率与有用频率下变频后得到相同的中频,镜像频率是需要抑制的,针对镜像干扰问题,选择采用带宽尽量窄、带外抑制较高的镜像抑制滤波器对其进行抑制。
(2)噪声系数与灵敏度。噪声系数大小反映接收通道内部噪声的大小,灵敏度反映接收通道对小信号接收能力的强弱,它们之间的关系[8]可由(1)表示。

为通道噪声系数,BW为信号带宽,为识别系数,从(1)式中,可以中看出噪声系数越小,接收通道的灵敏度越高。所以在设计接收通道的过程中应尽可能减小噪声系数,系统级联噪声系数可由(2)表示。

从(2)式中可以看出前级噪声系数大小对整体噪声系数大小起决定作用,所以在前级采用低噪声放大器可以有效保证接收通道整体噪声系数。
(3)线性动态范围。动态范围反应接收通道可接收信号的范围,动态范围的上限取决于接收通道的1dB功率压缩点,下限取决于接收通道的灵敏度,其关系如(3)式所示。

下变频通道的设计过程中,在兼顾对小信号的探测能力的同时,考虑到满足接收通道在输入信号较强的情况下可以正常使用,加入了一个最大衰减量为 31dB 的数控衰减器。通过调整数控衰减器的衰减量可以扩展接收机的动态范围,提高大信号处理能力。
(4)幅相一致性。多通道下变频模块为后端数字波束形成提供多路中频信号,良好的幅相一致性可以保证数字波束正确合成,在通道中适当采用 π型衰减器和调相线可以对通道的幅度相位进行调整,从而确保通道的幅相一致性。
4.2 校准网络
为了保证接收通道性能,确保后端数字波束正确形成,有必要对接收通道幅相进行监测与校准。接收通道校正分为外场校正和内场校正,外场校正又可分为远场校正和近场校正[9]。远场需要一个大范围的测试场和辅助天线,近场常采用近场探针,同时需要一个使探针精确扫描的复杂装置;内场校正则是依靠接收通道内的设备进行检测与校正,具体方法是通过通道内频率源模块产生测试信号,经行波馈源或者开关矩阵将测试信号送入接收通道的输入端。通常对于有源器件来说,每次开机环境参数及电压波动都会对信号的幅度和相位产生影响,为保证工作条件一致性,每次都必须进行内场校正;而对于无源器件,每次开机对信号幅度相位影响是一致的,所以只需进行一次外场校正即可。
本方案采用内场校正法对下变频接收通道进行校准,原理图如2.14所示,校准时,跳频源模块产生内场测试信号,以一路通道作为基准,利用开关矩阵选择相应的通道,比较通道之间的幅相值,通过通道内的衰减器和调相线对幅相值进行校准以达到指标要求。
5 仿真、测试结果
5.1 发射天线单元仿真结果
根据该射频前端需求,设计套筒式单极子天线,天线内芯高度l=30.24mm,套筒长度L=29.34mm,套筒直径A=11.97mm。仿真结果如下图所示。
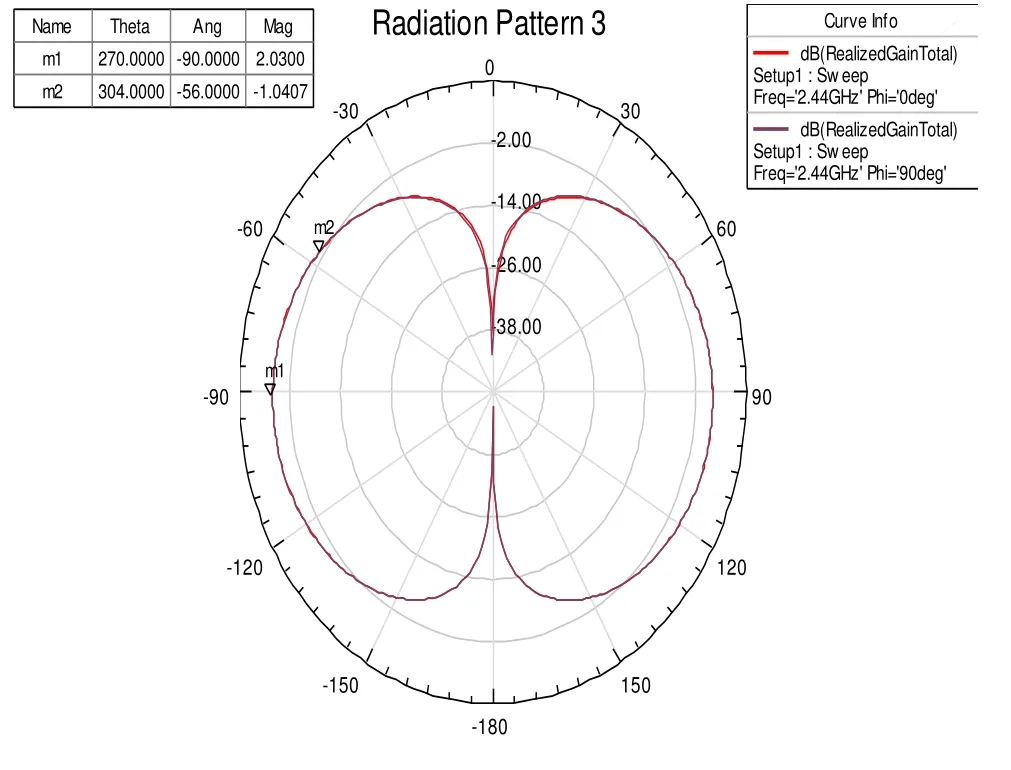
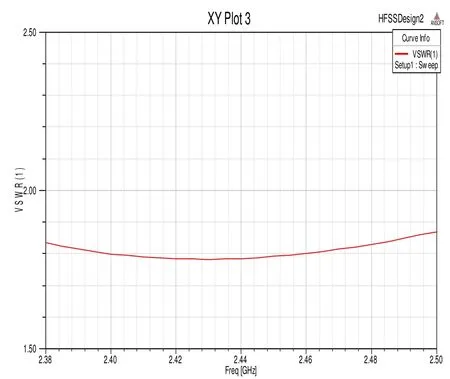
图3 发射天线仿真结果
由仿真结果知,在工作频带内,天线驻波<2,具有良好的匹配,天线增益达到2dB。
5.2 接收天线单元仿真结果
根据该射频前端需求,设计单馈圆极化微带天线,微带贴片尺寸为L×W=17.6mm×17.6mm,切角尺寸 a=1.5mm,馈电点距离中心的尺寸为,介质基板厚度,介电常数,仿真结果如下图所示。
由仿真结果知,在工作频带内天线驻波<2,具有良好的匹配,天线法向增益3.58dB。
5.3 下变频模块测试结果
下变频模块实物如图5所示。采用频谱仪、示波器、信号源、直流电源、噪声系数分析仪等对下变频模块进行测试。其主要指标测试结果为:下变频模块工作频率为S波段;下变频通道噪声系数<3,幅度一致性≤±1dB,相位一致性≤±5°,通道隔离度<-40dB,1dB压缩点≥8.8dB,通道增益如表所示;校准网络输出功率,校准网络幅度一致性≤±1dB,相位一致性≤±10°;频率源相位噪声:<-95dBc/Hz@1KHz、<-95dBc/Hz@10KHz。由测试结果和(1)、(2)、(3)式,该下变频模块的线性动态范围优于70.4dB。
图5 下变频模块加工实物

表1 下变频模块增益测试结果
6 结束语
本文提出了低成本全电控阵列前端的设计方案,其为无人机探测雷达提供信号。该前端采用锥台阵列可实现了较大空域的波束覆盖,采用全电控的方法可实现了波束快速扫描。针对主动探测模式设计了全向发射天线,考虑到被动探测目标信号极化方式的未知性设计了圆极化接收天线。设计了为数字波束合成提供中频信号的下变频模块,经测试该模块工作频带内具有良好的性能。
[1]许道明, 张宏伟.雷达低小慢目标检测技术综述[J].现代防御技术,2018, 4(1): 149-153.
[2]张光义, 赵玉洁.相控阵雷达技术[M].北京: 电子工业出版社, 2004.
[3]李阳.套筒天线宽带化小型化研究[D].西安电子科技大学, 2014.
[4]周巍.北斗卫星导航系统精密定位理论方法研究与实现[D].解放军信息工程, 2013.
[5]约瑟夫松.共形阵列天线理论与应用[M].电子工业出版社, 2012.
[6]梁志明.双频圆极化微带天线的研究[D].西安电子科技大学, 2012.
[7]郭崇贤.相控阵雷达接收技术: Receive techniques for phased array radar[M].国防工业出版社, 2009.
[8]Merrill I.Skolnik, 左群声.雷达系统导论[M].电子工业出版社, 2014.
[9]邱文杰, 杨超.DBF系统的通道校正技术[J].电子科技大学学报, 1992,(6): 593-601.
