非线性布尔网络系统模糊建模与动态性能分析
2018-09-18吕红丽宋玉晶段培永
吕红丽,宋玉晶,段培永
1965年,Zadeh[1]首次提出基于模糊集合的模糊数学概念。1974年,Mamdani[2]首先将模糊数学理论应用于工业控制中,实现了对锅炉和蒸汽机的模糊控制,使模糊控制从理论走向实际应用。1985年,日本学者Takagi等[3]又提出了以线性精确数学表达式为模糊规则后件的T-S模糊模型,将模糊控制系统与线性控制系统有效地结合起来。随后国内外学者基于T-S模糊模型,研究了非线性系统的大量控制问题,得到了丰富的模糊控制理论研究成果[4-9]。在T-S模糊模型的基础上,Feng等[5-6]提出了模糊动态模型(fuzzy dynamical model)。其主要思想是,构造一组线性模型,分别描述系统的动态特性,通过局部线性模型的加权组合得到系统的全局非线性动态模型。文献[10]中提出了一种离散时间模糊控制系统,将非线性离散时间系统作为模糊控制系统的后件部分,分析了系统的动态性能。
1969年,Kauffman[11]首先提出布尔网络模型,布尔网络是关于布尔状态变量的一种简单的逻辑动力系统,是当前学者专家们共同关心的热点问题。针对布尔网络研究缺少有效的数学工具问题,程代展教授在文献[12]中首次提出矩阵半张量积方法。这种方法将逻辑运算转换成代数运算,使得许多经典的处理量变过程的数学工具可直接用来分析逻辑动态系统。在文献[13]中,程代展教授将这种方法应用于布尔网络,将逻辑动态控制系统转化为普通离散时间系统,提出了一系列关于布尔网络的新理论。随后在文献[14-17]中研究了布尔网络系统的能控能观性等性质,形成了布尔控制网络分析设计的完整理论框架。之后,学者们在控制理论方面对线性布尔网络系统做了大量的深入研究[18-23],但是没有针对非线性布尔网络系统进行分析和研究。
为了解决非线性布尔网络的数学建模与分析问题,利用模糊动态模型的非线性特点,将模糊动态模型和布尔控制网络相结合,建立了模糊动态布尔网络系统的局部模型和全局模型,并且分别分析了系统局部模型和全局模型的能控性、能观性和稳定性。
1 预备知识
1.1 数学符号说明
为了叙述方便,文中用到的记号列表如下:Mm×n表示所有 m ×n矩 阵的集合,⊗表示矩阵的张量积 ; Col(A)(Row(A))为 矩 阵 A 的 列(行)集 合 ;Col(Ai)(Row(Ai))为矩阵 A 的 第 i 列(行);记 δin是单位矩 阵 In的 第i 列 ; Δn=δin|i=1,2,···,n;Dk={0,1,···,k−1},k≥2。记逻辑变量:真 ∼ T−1,假 ∼ F−0,则D={0,1};f:Dn→D 称 为 逻 辑 函 数 ; L ∈ Mn×r,称L 为逻辑矩阵,如果 C ol(L)⊂ Δm,m×r维逻辑矩阵全体记为 Lm×r;设矩阵 L ∈ Mn×r。其[中, C ol(L)]⊂ Δn,称L 为逻辑矩阵,可简记为 L =δni1i2···ir;矩阵B ∈ Mm×n为 布 尔 矩 阵 , 如 果B中(bi,j)∈D,m×n维布尔矩阵全体记为 Bm×n。
1.2 模糊动态模型
模糊动态模型是非线性复杂系统模糊建模中一种典型的模糊建模方法。模糊动态模型每条规则的后件部分是一种状态空间形式的局部线性系统,因此对于局部的线性模型可以采用线性系统的理论体系去研究,然后通过模糊推理得到全局意义下的模糊控制系统的分析和设计。
一个m个输入n个输出的非线性系统,其模糊s控制器可表示为 Σ ∈ f(y1×y2···×yn× x1× x2···× xm),其中 {xi}是模糊控制器的输入,论域为 Exi, { yi}是模糊控制器的输出,论域为 Eyj。将模糊变量 xi,yj按照隶属度函数进行模糊化, Exi={xi1,xi2,···,xiαi},i=1,2,···,m,分别对应于“负大”“负中”·· ·是基于隶属度的模糊集 合 ; Eyj={y1j,y2j,···,yβjj},j=1,2,···,n,分 别 对 应 于“负大”“负中”·· ·是基于隶属度的模糊集合。
假设总共有 N 条模糊规则,则第 k条模糊规则为 Rk, k =1,2,···,N,其模糊规则为

式中: Aik是一个模糊集合; yjk是第 k条模糊规则的第 j 个输出, j =1,2,···,n ;是第 k条模糊规则结论中第 j 个输出的线性多项式函数中变量 xi项的系数,一般为常数项,特别的通常可以归一化为1。
对 于 第 k 条 规 则 Rk,如 果 已 知 输 入x1=x∗1,x2=x∗2, ···,xm=x∗m,则 在结 论部 分的 输出 yjk可 以由线性多项式函数计算得到:

每条规则的激活度 µi为
式中: µAik(x∗i)表示论域中第i 个元素对 Aik的隶属度,∧是取小运算。
模糊动态模型的输出 yj是由所有 k条规则(k=1,2,···,N )的输出加权平均得到的。模型的输出为

1.3 逻辑的矩阵表示
矩阵的半张量积是中科院系统所程代展教授在文献[12]中提出的一种新的矩阵乘法,即设A ∈ Mm×n,B ∈ Mp×q:
1)如果 n =p,则称A与B满足等维数关系;
2)果 n =tp (记为 A ≻tB ),或者),则称 A与 B满足倍维数关系,否则称一般维数关系。矩阵乘积在倍维数关系下的一种推广如定义1。
定义1[13]设 X 为 n =pq 维行向量,Y 为 p 维列向量。将X等分成 X =(X1,X2,···,Xp),这里Xi∈Rq,i=1,2,···,p 。那么, X 和 Y 的半张量积记作X▷Y,定义为一个行向量:

类似的,

为一列向量。
普通矩阵乘法是半张量积的特殊形式,普通矩阵乘法具有的性质,对于半张量积几乎都成立,此外还具有一些特有的性质。
定理1[13]设 f (x1,x2,···,xn)为一个逻辑函数,在向量形式下 f :Δ2n→ Δ则存在唯一的逻辑矩阵Mf∈ L2×2n,称为 f的结构矩阵,使得

式中 x =▷ni=1xi。常用的逻辑算子及其结构矩阵分别为

1.4 布尔 (控制)网络
定义2[13]1)布尔网络的动态方程为
式中: fi:Dn+m→ D,i=1,2,···,n;为逻辑函数;xi(t)∈D,i=1,2,···,n为状态变量。
2)布尔控制网络是指一个含有输入输出的布尔网络,其动态方程为
式 中 : xi(t)∈D, i = 1,2,···,n 为 状 态 变 量 ;ui(t)∈D,i=1,2,···,m 为控制变量; yi(t)∈D,i=1,2,···,p为输出变量;fi:Dn+m→ D,i=1,2,···,n;hi:Dn→ D,i=1,2,···,p 为逻辑函数。
定理2[13]利用向量表达式
1)布尔网络的动态方程式(8)可表示为

2)布尔控制网络的动态方程式(9)可表示为

2 非线性布尔网络系统的基本概念
定义3 1)一个多输入多输出的非线性布尔网络系统可以表示成模糊动态布尔网络模型(fuzzy dynamic Boolean network model,FDBNM),即

简记为

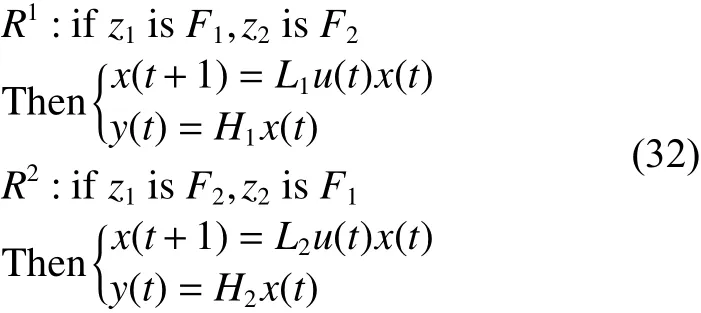
2)第 k个FDBNM为

式中: µk(z)是模糊推理集合 Fk的隶属函数;Fk=(Lk,Hk)为局部模型的结构矩阵, ( Lk,Hk)也称为FDBNM的第 k个子系统。
这里,Rk,k=1,2,···,N 为系统的第 k条模糊规则,也称为第 k个模糊子系统,N为总的模糊规则数; z1,z2,···zn为规则前件语言变量;为模糊集,其隶属度函数设为三角形函数,记作;(X(t+1),Y(t))是系统的输出; U (t)是输出部分布尔控制网络的控制变量; ( Lk,Hk)为系统的结构矩阵。
对 给 定的输 入 信 号 z1=z∗1,z2=z∗2,···,zn=z∗n,利用三角形隶属函数将其模糊化,对每条规则的激活度采用max-min方法:
3)使用加权平均法解模糊,可得FDBNM的全局模型为
简记为

定义4 1)对于模糊动态布尔网络控制系统的局部模型式(14), G 固定,如果存在控制变量,能使方程式(14)从初始状态 X (U,0)=X0到达终端状态 X (U,t)=Xd,则称 Xd从 X0经过t步是能控的。如果存在控制变量 U ,使式(14)能从任意初始状态到达 X (T)=Xd,则称模糊动态布尔网络控制系统的局部模型是能控的。
2)对于模糊动态布尔网络控制系统的全局模型式(15),如果存在控制变量 U0,能使方程式(15)从初始状态 X (U,0)=X0到达终端状态,则称 Xd从 X0经过t步是能控的。如果式(15)能从任意初始状态 X0到达 X (T)=Xd,则称模糊动态布尔网络控制系统的全局模型是能控的。
定义5 1)对于模糊动态布尔网络控制系统的局部模型式(14),对任意给定的初始状态如果至少存在一个布尔控制序列,使初始状态能由输出序列唯一地确定,则称局部模型是状态能观测的。
2)对于模糊动态布尔网络控制系统的全局模型式(15),对任意给定的初始状态如果至少存在一个布尔控制序列,使初始状态能由输出序列唯一地确定,则称全部模型是状态能观测的。
定义6 1)对于模糊动态布尔网络控制系统的局部模型式(14),如果经过固定步数,存在一个不动点 Xe,使得对于局部模型的任意的初始状态都有,则称系统的局部模型是能稳定的。
2)对于模糊动态布尔网络控制系统的全局模型式(15),如果经过固定步数,存在一个不动点Xe,使得对于全局模型的任意的初始状态都有, 则称系统的全局模型是能稳定的。
3 非线性布尔网络系统动态性能分析
系统局部模型的布尔控制网络系统(14)的结构矩阵可以等分为 2m块[13],即

式中: B lki(Lk)是矩阵 Lk的第i 个 n ×n的 块; Bi∈ L2n×2n,i=1,2,···,2m。令

3.1 能控性
首先引用布尔矩阵的布尔乘法及布尔幂的定义[13]。
1)设 α ,β,αi∈ D,i=1,2,···,n , 则 布 尔 加 法 定义为
2)设 A =(aij)∈ Bm×n,B=(bij)∈ Bn×p,则布尔乘法定义为

3)设 有定义,则布尔幂定义为A▷A

对于模糊动态布尔网络控制系统的局部模型式(14),定义能控性矩阵为[13]

定理3 1)当且仅当矩阵 Ck>0时,局部模型式(14)是能控的。
2)当且仅当矩阵 C >0时,全局模型式(15)是能控的,即
证明 通过数学归纳法来证明。
当 j =1时,由式(17)知,当 Mk>0时,存在一个控制序列使状态 X0到 Xd,显然局部模型式(14)是能控的;假设当 j =k′时,式(14)能控 ,则 当 j=k′+1时因为Mk>0,可知 Ck>0,且存在控制序列使局部模型式(14)能控。
3.2 能观性
为了找到能观性矩阵,对于第k个局部模型,定义一组矩阵集合[13]:Ωki∈ L2p×2n,i=0,1,2···其表达式为


令

式中 Ok称为系统局部模型式(14)的能观测矩阵。
定理4 1)设系统局部模型式(14)是能控的,那么局部模型式(14)是能观的,当且仅当

2)设系统全局模型式(14)是能控的,那么全局模型式(17)是能观的,当且仅当

证明[16]对给定的状态 X0,可以观测 H X0,因为系统是能控的,所以使用不同的控制序列 Ui,可以观测 H LUi,故 H LUi1LUi2···LUisX0是可观测的。因为 s ≥k0,没有增加之前集合的线性独立的行数,线性独立行数对初始状态的辨识是无用的,只有当包含所有不同列,即时,初始状态才能辨识,全局模型是能观测的。
3.3 稳定性
对于布尔系统式(8)和布尔控制系统式(9)记χ=Dn为它们的状态空间。点 X ∈χ可以表示为X=[x1,x2,···,xn]T,逻辑映射 F :χ → χ,逻辑映射形式为[13]
简记为 Z =F(X),X ,Z∈χ。
定义7[13]逻辑映射 F 的关联矩阵 I( F)=(bij)是一个 n ×n矩阵,定义为

记X=[x1,x2,···,xn]T,F=[f1,f2···,fn]T,则式 (14)对应的布尔网络的逻辑映射可简记为

同理式(15)对应的布尔控制网络的逻辑映射可简记为

式中 X (t)∈Dn,U(t)∈Dm。
定理5[13]1)设 ξ是式(14)的一个不动点,则X(k)∨¯ξ≤I(Fk)j×(X(0)∨¯ξ),如 果 存 在 j >0,使 得[I(Fk)](j)=0,则称局部模型是能稳定的。
2)设 ξ 是式(15)的一个不动点,则X(k)∨¯ξ≤I(F)j×(X(0)∨¯ξ),如果存在 j >0,使得 [I (F)](j)=0,则称全部模型是能稳定的。其中
证明[14]①必要性:如果系统的局部模型是稳定的,即系统是收敛的,则 T 步后(T为极短的时间段),所有的状态收敛到 ξ,所以当 j >T时成立。
②充分性:假设存在 j >0,使 [I (Fk)](j)=0成立,那么对于任意的 X 有 Fkj(X)=ξ, X (t)∈Dn。故对任意步数 t ≥j,Fkt(X)=Fkj(Fkt−j(X))=ξ ,得证。
同理可证全局模型时系统的稳定性。
4 实验仿真
根据第3节介绍的模糊动态布尔网络控制系统,本节选取多输入多输出模糊模型进行非线性模糊建模及其能控性、能观性分析。

其代数表达式为
则整个系统模糊状态方程可表示为式(15),其中

由选取的模糊模型,规则1和规则2时的状态变量、输入变量和输出变量的初始状态可分别设为

4.1 能控性
由式(16),将规则1时的结构矩阵等分为4块:


则
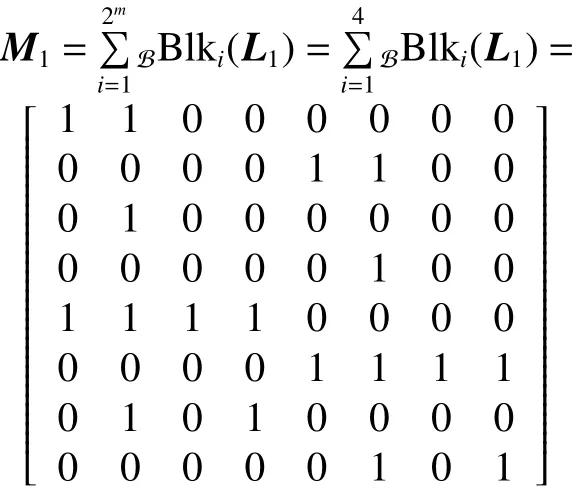
其能控性矩阵为
故规则1时的局部模型是可控的。
由MATLAB仿真知,规则1时控制变量和状态变量的关系如图1(a)所示。
同理,规则2时有:


其能控性矩阵有
故规则2时的局部模型是不可控的。
由图1可知,规则1时的局部模型是可控的,规则2时的局部模型是不可控的,与实验计算结果是一致的。
4.2 能观性



Γ12为64×8维的布尔矩阵,由于篇幅的限制,上式中只列出了一部分。

Γ13为256×8维的布尔矩阵,由于篇幅的限制,上式中只列出了一部分。

O1为340×8维的布尔矩阵,由于篇幅的限制,文中只列出了一部分。
可得,Rank (O1)-7<23=8。
由MATLAB仿真知,规则1时输出变量和状态变量的关系如图2所示。由图2知,虽然规则1时的局部模型是能控的,但是是不能观测的;规则2时的局部模型是不可控的,故也是不能观测的,与实验计算结果是一致的。
4.3 稳定性
规则1时,式(33)对应的布尔网络的逻辑映射为 X (t+1)=F1(X(t)),X∈D3。
关联矩阵为

[I(F1)](5)=I(F1)≠0, 即 [I (F1)](k)≠0,则 规 则1下的局部模型是不稳定的。
规则2时,式(31)对应的布尔网络的逻辑映射为 X (t+1)=F2(X(t)),X∈D3。
关联矩阵为

[I(F2)](3)=0,则规则2下的局部模型是稳定的。
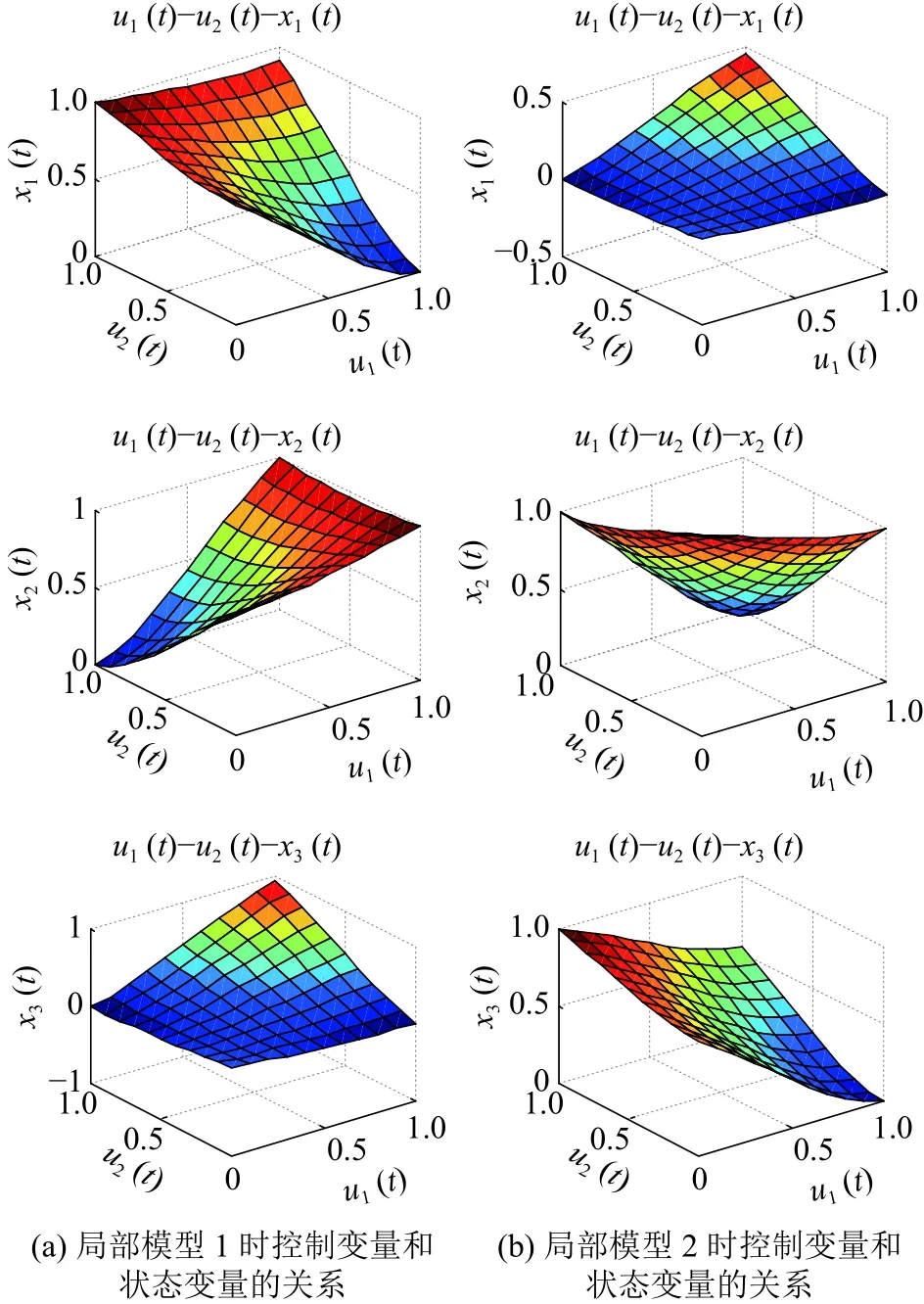
图1 控制变量和状态变量的关系Fig. 1 Schematic diagram of relationship between the control variables and state variables

图2 输出变量和状态变量的关系Fig. 2 Schematic diagram of relationship between the output variables and state variables under rule 1
综上分析,整个系统模糊状态方程可表示为式 (15),其中,取 µ1=1,µ2=0,则L=L1,H=H1,F=F1,C=C1>0,Rank(O)=Rank(O1)=7<23=8, 因此系统的全局模型是能控不能观且不稳定的。
5 结束语
通过具体实例仿真分析可知,对于布尔网络系统,可以实现非线性模糊建模和动态性能分析。利用模糊动态模型的非线性特点,将模糊动态模型和布尔控制网络相结合,分别建立了模糊动态布尔网络控制系统的局部模型和全局模型,并且对其能控性、能观性和稳定性进行了分析。
