一种基于激光导航的应急疏散与救援指挥机器人
2018-09-18王海琴
王海琴
(青岛职业技术学院,山东青岛,266000)
引言
现有系统一般在固定地点安装传感器,通过GIS系统实现监控和应急疏散及救援指挥。但此方式成本高、位置固定、维护复杂、推广难度大,难以实现全覆盖应用,一旦出现线路损坏、通讯中断等问题,有可能造成系统瘫痪。本文提出一种集成能力强的救援应急指挥设备,具有一定的市场推广前景。
1 基于激光导航的应急疏散与救援指挥机器人
现有机器人一般采用搭载摄像头的方案,其运动控制、图像采集、传输控制器分立设置,如日本福岛核电站救援工作中采用的机器人。此类机器人造价较高、制造难度大,对人工操作和数据传输速度要求高,且效率较低。本文采用树莓派微型电脑作为处理器,具备PC机所有基本功能,相比传统单片机、DSP等处理器,有更强的信息处理能力,能同时承担机器人运动控制和地图构建工作需求。且具有强大的传感器搭载能力,可以作为应急疏散与救援指挥机器人开发平台,根据灾害及事故现场环境,进行二次开发,提高机器人环境适应性。
2 机器人设计原理
本文所研发的应急疏散与救援指挥机器人可进行与以下工作:(1)实现自主导航的机器人运动控制,并适应可视性差的现场状况。(2)能流畅实现现场地图构建与传输功能。(3)可扩展性强,具备二次开发能力,有强大的传感器搭载能力,能够探测有毒气体、有穿透力强的声光引导能力。
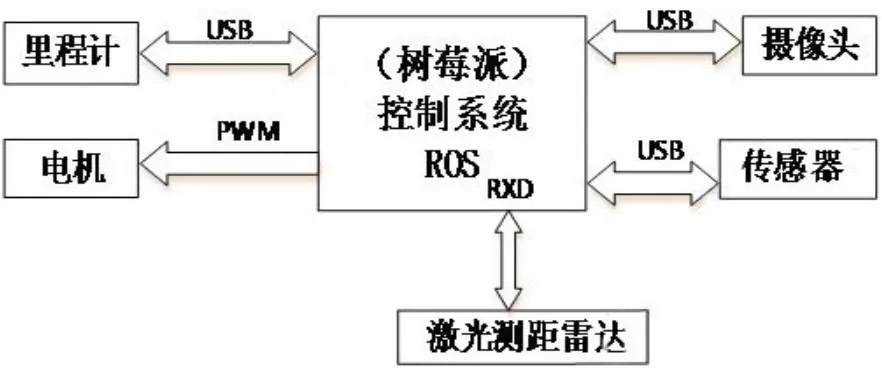
图1 机器人原理图
具体操作为,在树莓派系统上移植机器人控制操作系统,实现对机器人的运动控制,配合激光测距雷达、里程计等,采用SLAM(即时定位与地图构建)技术,实现机器人自主导航和地图构建功能。同时实现地图构建数据的处理、存储与传输,救援人员可在远程手持设备上查看地图和图像,便于开展救援决策、发送指挥指令,机器人搭载的声光报警设备可引导被困人员撤离。
设计解决了以下关键技术:(1)机器人操作系统向树莓派处理器的移植,实现树莓派对机器人的运动控制和信息处理。(2)基于SLAM技术的地图构建。(3)应急疏散及救援指挥路径规划问题。
2.1 操作系统的移植
综合Turing OS和ROS机器人操作系统特性,本文采用主要支持Ubuntu系统的ROS操作系统。在树莓派上安装Ubuntu系统,再将ROS操作系统移植到Ubuntu系统中,调用相应功能包,实现机器人控制。将SLAM算法移植到树莓派中的ROS操作系统,再综合处理传感器测得信息,实现即时定位与特征地图构建。
将ROS操作系统移植到树莓派上,相当于在PC机上进行ROS系统的操作,利用远程控制或者编写Shell文件可以使机器人随时执行指令,实现了机器人的自主导航。
2.2 基于SLAM技术的地图构建
地图构建是应急疏散与救援指挥机器人的核心任务,需要解决的问题主要包括激光测距和即时定位、地图构建等问题。
(1)激光测距
本文将雷达激光测距工具 RPLIDA移植到树莓派的 ROS系统中,调用RPLIDAR的驱动和功能包,运行可视化工具rviz后即可获得雷达扫描的图形界面。
(2)机器人即时定位与地图构建
本文用SLAM技术解决机器人即时定位和地图构建问题。机器人通过重力加速度陀螺仪传感器、激光雷达的配合来定位。某个环境特征相对机器人的位置信息Z(k)观测方程如公式1所示:

其中xi和yi是某个环境特征位置的坐标,xvy(k)和xvx(k)为机器人的位置坐标。
公式2为机器人的运动模型,设当前时刻为i,下一时刻为i+1。对应位置的横坐标为x(i)、x(i+1),纵坐标为y(i)、y(i+1),面向角为θ(i)、θ(i+1)。位移数据横坐标为x(i)△,纵坐标为y(i)△,面向角为θ(i)△,Ωx(i)、Ωy(i)、Ωθ(i)是感应器测量时的误差。

在进行地图构建时,主要的步骤有特征提取、数据关联、状态估计、状态更新以及特征更新等(如图2所示)。得到机器人位置估计数据后,采用扩展卡尔曼滤波器(EKF)对环境信息进行更正,得出机器人准确位置。

图2 基于SLAM技术的地图构建流程图
为保证机器人位置数据与测距单元数据的匹配性,采用插值方法对数据进行预处理,提高精度。在构图时,需要将激光雷达当前采集的信息匹配拼接到原有地图中,避免出现失真问题。
在确定所需提取的特征后,使用Spike方法寻找测距单元返回数据中相邻数据差距超过一定范围的点作为特征点。在定位过程中,得到路标方位信息后将其特征存储在数据库中,除非该特征已经出现了N次,不然将其清出数据库。在得到新的传感器信息后,将提取到的特征与数据库中已经出现N次并且距离最近的特征关联起来,最终实现自主导航与地图构建功能。
2.3 应急疏散及救援指挥路径规划问题
本文实现了简单的应急疏散和救援指挥路径规划功能,在地图中构建2D或3D占据网格图,根据障碍物位置和设定的膨胀系数形成膨胀成本图。如图3所示,图中五边形是机器人,红色表示障碍物、蓝色表示障碍物膨胀后区域。机器人为躲避障碍物不能碰到红色区域,同时其中心点不可越过蓝色边线。

图3 设定膨胀系数的路径规划效果图
3 应用前景
本文设计的机器人自主导航和地图构建功能,能在事故发生后代替人工进行应急疏散和救援指挥。在完成地图构建与传输工作后,可接受人工指令,借助摄像头进行现场细节查看,借助声光指示设备,引导被困人员紧急疏散。且使用的处理器数据处理能力强,可作为基础研发平台,搭载不同类型传感器开展二次开发,使其适应多种环境要求。本作品灵活便携、供电简单、不依赖公共通讯网络,为研发复杂环境下基于激光导航的应急疏散与救援指挥机器人提供了良好的理论基础和工程基础,具有较好的实际意义和应用前景。
4 结束语
本系统以应急救援工作很难展开的背景为切入点,技术核心就是实现环境的探测与地图构建。核心就在于完善一套能够实现地图构建与环境信息监测的平台,从而为应急救援与指挥任务的开展奠定良好的基础。
[1]Cao W.Process optimization and automatic control of double intermediate frequency induction hardening for cold roller[J].Metal heat treatment, 2015,40(5): 152-154.
[2]Cui Z, Zijian L I, Xiang Q, et al.A Novel Wind Power System With Dual-rotor and the Dual-mode Power Control Strategy Thereof[J].Journal of the Chinese electrical engineering project, 2014, 34(36): 6499-6505.
[3]Xie H Y, Luo J B, Yan Z Y, et al.Research on on-line simulation technology for feedwater control system in nuclear power plant[J].Atomic energy science and technology, 2014, 48 (supplement 2): 556-557.
[4]陈光明.多机器人协同定位与环境地图构建研究[D].广东工业大学, 2011.
[5]朱航.微小型陆空两栖机器人地面移动及控制技术[D].北京理工大学, 2015.
