服务机器人解耦球型手臂运动控制方法
2018-09-17谢艳艳胡艳华
谢艳艳,胡艳华,甘 戈
(1.内蒙古机电职业技术学院,内蒙古 呼和浩特 010051;2.内蒙古工业大学,内蒙古 呼和浩特 010051;3.中国科学院大学,北京 100049)
1 引言
根据市场需求,现有六自由度手臂由于在狭小的工作空间中,自由度少,灵活性差。七自由度手臂应运而生,符合人体工程学需求,具备人手所能实现的一些较为复杂的功能。针对六自由度手臂不足,新七自由度功能性手臂,其中肩部、肘部各2个自由度,手腕处3个自由度,通过各关节之间的运动配合实现所需功能。
然而该服务机器人手臂设计中,手腕是该机器人手臂灵活性的保障。近年来,国内外学者设计各种类型的手腕机制,具体可以分为三类:(1)球形的手腕,三个关节轴交点,位置和姿态的解耦,逆运动学分析很简单,结构紧凑,繁重的工作比大,大多采用球形腕关节空间机器人和其他特殊场合。(2)非球面的手腕,不符合三轴,结构紧凑,运动是不可分割的。(3)平行结构的手腕,手腕并联机构的实际小型化。
国内外学者对服务机器人手臂的研究如下:如针对文献[3]提出的pitch-yaw-roll三自由度手腕机构存在pitch、yaw运动耦合干涉问题,文献[4]提出了一种双环解耦方法的新结构。国内某大学的科研人员对Trallfa手腕进行了分析和仿制,但是这种机械手腕的球齿是由分布在球冠上的凸齿和凹齿等特殊齿轮副组成(凹凸齿),存在传动原理误差且加工制造困难。文献[6]提出一种基于斜齿轮的三自由度手腕。这种机械结构的第二条轴线与共线的一、三轴线存在一个斜角,绕每个轴线的转动合成手腕三自由度的旋转运动,这种结构存在受载荷时跳跃的问题。文献[7]提出了一种由锥齿轮和万向节传动的三自由度机械手腕关节,但仅仅是停留在概念设计上。文献[8]基于主动万向节提出了双主动万向节并设计了两自由度的拟人手腕关节。双主动万向节可以确保完全的自由滚转运动并且可以主动控制关节的柔顺性,手腕可以很好的模仿人类手部运动。然而这种结构只具有俯仰与偏航两个自由度。基于上述情况,提出一种新型七自由度的服务机器人手臂。手臂的位置由前四轴共同决定。姿态由三自由度的三主动驱动万向节手腕。该腕部结构紧凑且小巧灵活,可实现俯仰、偏摆,其显著特点是可以实现大角度自转运动。该服务机器人七自由度机械手臂适用于狭小作业空间,如开启阀门等。可有效的应用于工业、航天等领域。
2 机械结构及工作空间
2.1 球形腕结构
肩关节、肘关节设计双自由度机构,与原有4自由度手臂相同,只是在电机布置上有所差别,如图1所示。电机通过锥齿轮传动实现手臂外展,偏置电机通过直齿轮传动实现手臂前后摆动[9-10]。肘关节与肩关节结构原理相同。末端安装与灵巧手等外围部件的安装接口,通过偏心法兰对直齿轮传动系统进行消隙。手臂内置肘部电机与腕部电机的驱动板卡,便于后期的调试与维护。同时手臂内可安装触摸传感器模块,通过对人体的感知可做出相应的语音或表情等动作,提高与人的互动性与趣味性。
2.2 球形腕结构
三自由度手腕关节的3D模型外形与剖切图,如图2所示。

图2 手腕3D模型外形图Fig.2 Wrist Outline Drawing 3D Model
新型手臂机构设计,主要包括2自由度肩部、2自由度肘部、3自由度腕部机构。肩部采用直齿轮传动系统与锥齿轮传动系统。通过偏心法兰对直齿轮传动系统进行消隙,通过调整套筒对锥齿轮传动系统进行消隙。两个自由度均安装机械限位机构,肘部结构与肩部结构相同。腕部利用内外双万向节实现手腕自转,利用上下半球的耦合运动实现手腕的侧摆与俯仰。三个电机后置,通过直齿轮传动系统传递动力。
3 运动学正分析
3.1 手臂分析
转换矩阵(1~4),根据各个关节的空间几何关系可以获取到相邻两个坐标系的变换矩阵,如下所示:

3.2 手腕求解
手腕末端输出的位姿由手腕的三个自由度决定。在手腕球心建立坐标系,如图3所示。
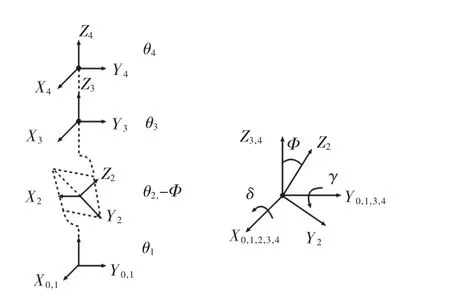
图3 坐标系的建立及运动参数Fig.3 The Establishment of Coordinate System and the Motion Parameters
θ2为上下两半球转动而在倾角为的斜面上的角度差φ=22°,其式(1)为:

4 运动学反分析
4.1 传统方法缺点
一般来说传统的求解机械臂各个轴的顺序为θ4⇒θ3⇒θ2⇒θ1⇒θ6、θ5、θ7,在每个步骤中,都可能存在多个符合条件的角导致最终解出多组解,可以根据机械限位的情况筛选掉不在此范围内的解。
由此可知本方法存在如下问题
(1)由于本算法限定了第三轴,的关节值为机械限位的中间值,舍弃了第三轴的其他可能性,导致反解所得的解中不一定包含示教操作过程中所记录的真实关节值;
(2)当机械臂接近于竖直立起的状态时会导致末端位姿的X、Y两轴坐标接近于0,反解算法中的计算过程中有分母接近于零的情况,导致无法得出七个轴的可行解;需要限定示教操作过程中防止第二关节值逼近及,第四关节、第六关节防止逼近、和;
(3)第三轴关节值选取为软限位的中位数,并不一定最为合适,可以根据经验调整第三轴关节值,使姿态更加自然。
4.2 牛顿迭代解手臂
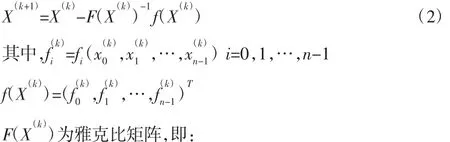
通常情况下求解非线性方程组,方程数与未知数个数相等,对于非线性方程组。
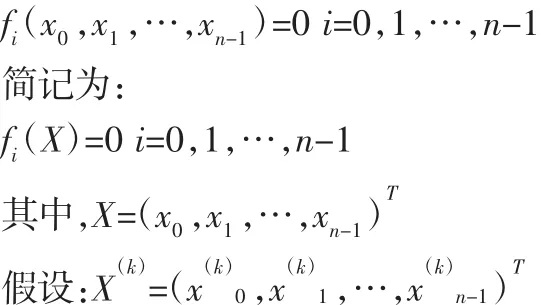
为非线性方程组第k次迭代近似值。则计算第k+1次迭代值得牛顿迭代格式为式(2):

通过牛顿迭代法,可以求得 θ1、θ2、θ3、θ4。
其中注意牛顿迭代的注意事项为:
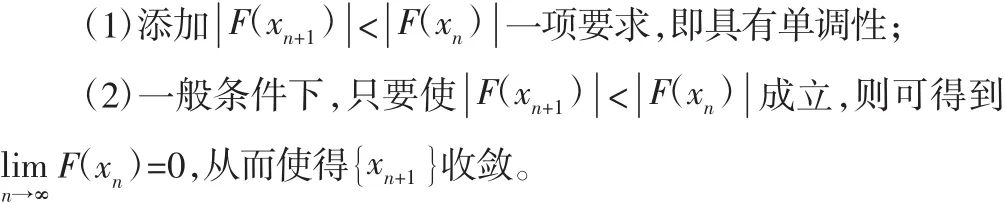
此方法计算的结果完全依赖于初值的选取,而牛顿法的初值无法准确得到,故此方法仅仅在初值离解较近的时候效果较好;其他位置可能迭代出不同的结果,尽管其可能满足末端位姿约束条件。
4.3 解析求解球形腕
沿着末端输出轴线滚转的第三个自由度相对于其他两自由度独立,可单独考虑手腕的俯仰-偏航两自由度。在球心用RPY角描述坐标系Σ3相对于Σ0的位姿有:先绕y轴旋转δ角,最后绕z轴旋转γ角;

4.4 算法验证
对于机器人主要行走的轨迹应该为直线或正弦曲线,以正弦曲线为例,保持机器人姿态不变,末端按照正弦曲线运动10个周期(20π),得到末端轨迹,如图4所示。
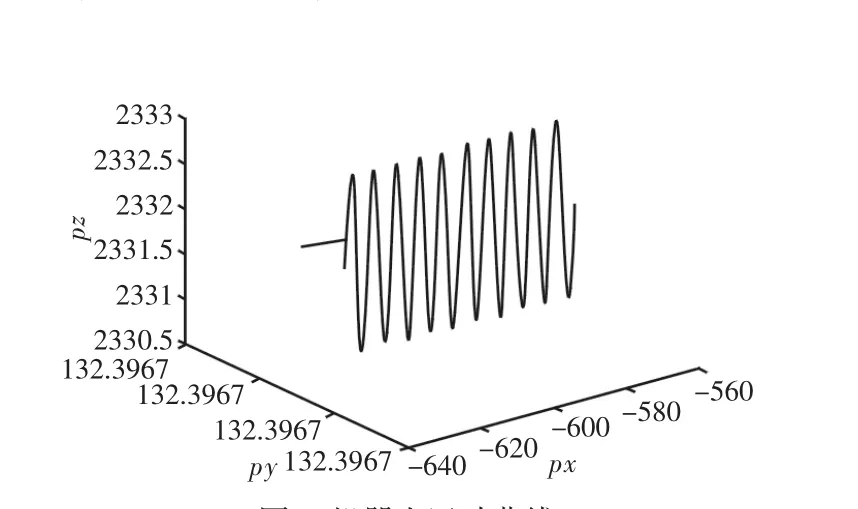
图4 机器人运动曲线Fig.4 Robot Motion Curve
图中红色为预期的轨迹,而蓝色为实际跟踪的轨迹,最前端的蓝色直线是由于跟踪的轨迹和预期的轨迹。可以看到蓝色与红色是绝对重合的,验证了运动学的准确性。
5 软件设计流程
5.1 电机控制方案
直流电机采用H桥驱动。支持双极性PWM和单极性PWM控制。控制环结构,如图5所示。
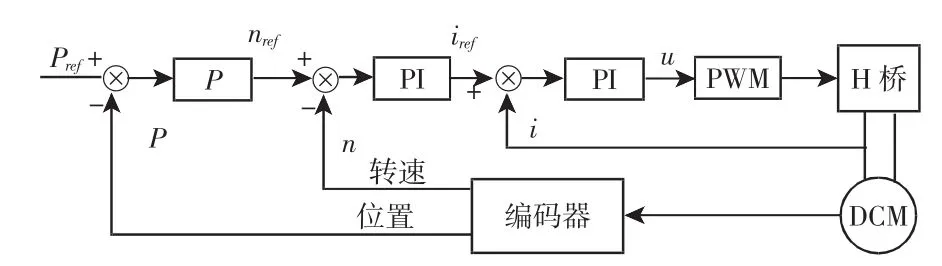
图5 电机控制方案Fig.5 Motor Control Scheme
5.2 软件流程与模块划分

图6 电机控制功能软件流程Fig.6 Motor Control Function Of The Software Process
电机控制功能软件流程,如图6所示。(1)编码器位置、速度采样:通过DSP外部总线接口访问FPGA数据,读取多圈值、单圈值、速度计算间隔;(2)电流采样:PWM中间点,即计数器PRD,触发AD采样。AD对每路电流对称采样四次求平均,共分配12路AD通道。采样完成后进入AD中断处理数据,并进行控制环计算;(3)PWM输出:SVPWM算法输出控制电压,PWM配置成三相双极性控制模式;(4)SPI通信的EEPROM:直接移植SPI通信程序,软件中使用任务线程处理EEPROM的读写;(5)数字IO:数字IO并不直接连接DSP,而是连接FPGA。DSP通过总线地址的方式,输出8位IO信值控制LED,读入驱动器轴号对应的4位IO值;(6)CAN通信:直接移植CAN通信驱动程序;(7)串口SCI通信:直接移植SCI通信驱动程序。
6 结论
针对服务机器人七自由度手臂机械结构进行分析。首先利用MDH法建立了转换坐标系,得到了各关节连杆的相对关系。其次,作为机器人底层核心技术之一的逆运动学算法一直受到硬件性能有限和迭代的初值选取难易控制等因素的制约。提出了一种基于牛顿迭代法反向解析机器人手臂。在提出的七自由度手臂其腕关节结构紧凑,重量轻、灵活运动等等,可以提高机器人的工作性能在狭窄的环境限制,特别是能够实现大角度旋转。最后阐述了软件设计的流程,对于机器人的程序搭建有着重要的意义。
