六脉波双变量交交变频工频调压闭环研究
2018-09-14李亚民杜庆楠崔占奇
李 拓,李亚民,杜庆楠,崔占奇
六脉波双变量交交变频工频调压闭环研究
李 拓1,李亚民2,杜庆楠1,崔占奇1
(1. 河南理工大学电气工程与自动化学院,河南 焦作 454000;2. 郑州科技学院,河南 郑州 450064)
在基于六脉波双变量交交变频基础上,为了避免电机在软启动过程中由变频段(低于50HZ)向工频(50 HZ)调压段切换时因频率极差较大而导致的机械特性变软,提高电机起动至共频段转速的控制性能,抑制由37.5 HZ向50 HZ切换时引起的瞬时冲击电流,以满足工业控制对调速精度的要求。通过采用增量式PID控制算法对调压时间常数进行控制,将调压时间常数偏移量作为控制量形成闭环,实现闭环调节。大量的仿真与实验结果均表明在闭环调节的作用下,电机转速超调量较小,几乎可以无静差的稳定运行于1400 r/min,实现了由变频段向工频调压段切换时的软过度。
六脉波双变量;交交变频;工频调压;闭环
0 引言
交流电机作为机电能量转换的执行机构,被广泛应用于工业生产、矿山传输、国防工业、交通运输等多个领域。特别是三相异步电动机因其具有结构简单、运行可靠、效率较高、价格低廉、维护方便等诸多优点,已经广泛应用到各个行业中[1-2]。然而电动机的起动性能却一直不理想,尤其是当异步电动机在额定电压下直接起动时,起动电流可达额定电流的4~7倍,重载时可达额定电流的10倍以上[3-4],虽然电机起动过程很短,但是过大的起动电流会造成较大的线路压降和损耗,此时会严重影响周围其他电气设备,且瞬间较大的起动电流也会使电动机绕组发热,降低绕组绝缘性能,缩短电动机的使用寿命,并会产生较大的能量损耗,造成电能的浪费,此外直接起动时也常伴随有较大的机械冲击,危害电机的轴承。由于电机直接起动时的种种不利因素,在生产实际中,只有容量较小的电机才允许直接进行起动[5-6]。
利用变频器驱动异步电动机进行软起动,不仅能有效降低起动电流,而且还能提供较大的起动转矩,使电机获得较为理想的起动性能。六脉波双变量交交变频器不仅具有通用变频器所具有的优点,而且与同等容量的通用变频器相比性价比较高,且在3分频以上具有较宽的频率输出范围,对这些频率下的波形加以改造和利用,可有效改善电机的软起动性能。
为对电机进行全范围软起动控制,在工频段(50 Hz)本文对六脉波交交变频器工频调压策略进行研究,同时为限制变频段向调压段切换时由于级差较大而引起的电流冲击[7],在工频段加入调压闭环控制策略,以实现变频段向工频调压段切换时的软过渡。
1 解析模型
1.1 六脉波交交变频工频调压模型研究
图1所示为六脉波交交变频器功率变换电路的结构图(U相),其中1~12为晶闸管编号,也即晶闸管控制字,A~F为6相输入电源。从图中可以看出,交交变频器晶闸管主电路每相由6组反并联的晶闸管组成,因而可实现电流的双向流动,结合电力电子技术知识可知,六脉波交交变频器主电路结构包含三相交流调压电路拓扑结构,因而在调速过程中无需其他切换装置即可由变频段切换至工频段进行调压软起。根据交交变频器晶闸管功率变换电路的结构,共可将其分为6组交流调压电路,每组调压电路所包含晶闸管的编号如表1所示。
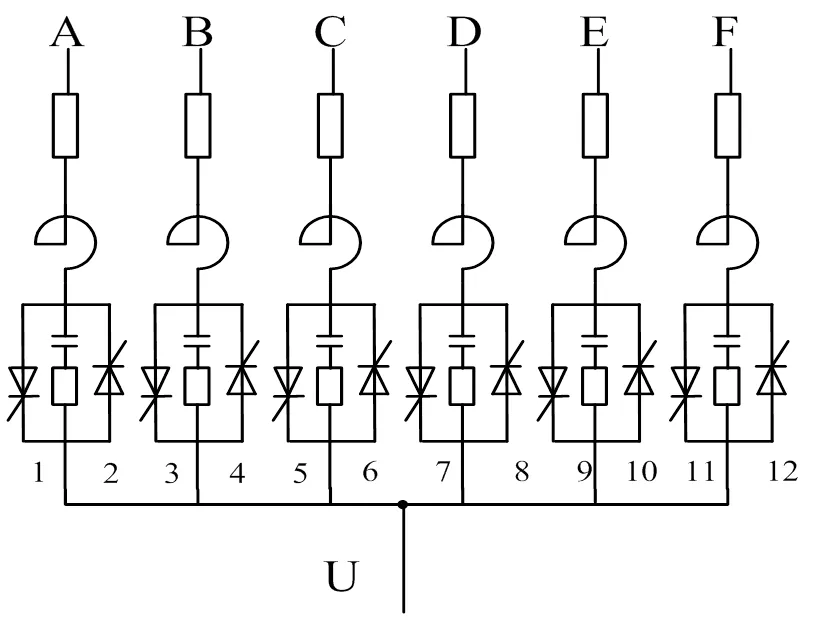
图1 六脉波交交变频器晶闸管模块结构图(U相)
表1 工频调压电路晶闸管控制字
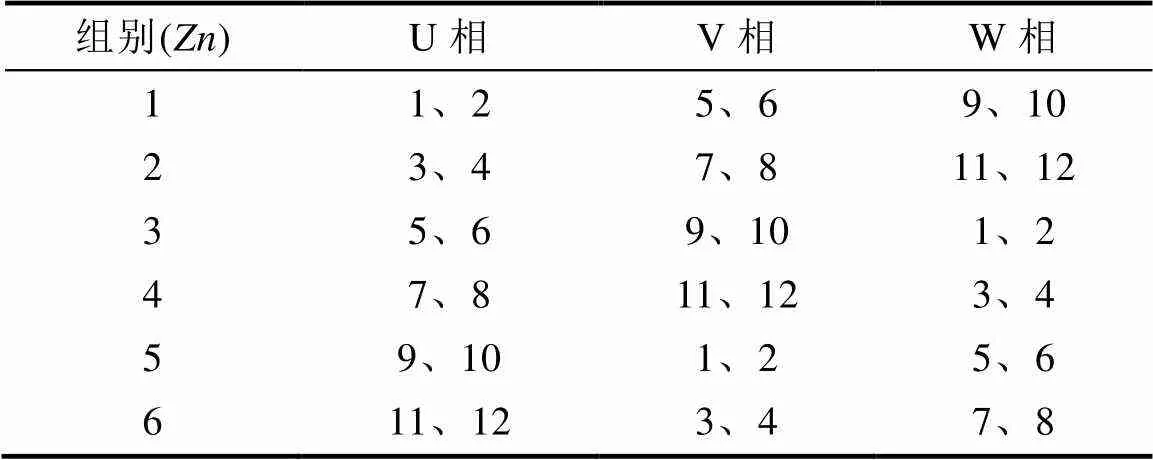
Tab.1 Thyristor number of voltage regulation circuit


在程序中根据高频段向工频段过渡时对应分频下的晶闸管控制字,可相应的选取工频条件下晶闸管调压电路的组别,并按以上规则对调压电路中晶闸管的通断进行控制,从而实现六脉波交交变频器工频段调压调速功能。
1.2 工频调压闭环调速特性分析
由图2可知,开环情况下,起始时刻负载TL2稳定运行在B点,由于扰动某一时刻负载增大至TL3,则根据调压特性,曲线此时转速将会下降至E点稳定运行,转速降落较大,即开环情况下随着电压的降低,电机的机械特性变软,调压深度过深时,较小的扰动也会造成转速的波动。而生产实际中常希望电机能够起动至给定转速下稳定运行,此时就需在调压过程中加入闭环调节[10]。

图2 工频调压闭环特性
以图2为例来对工频段调压闭环的特性进行分析。假如某一时刻下电机稳定运行在B点,此时负载为TL2,当负载由于扰动由TL2增大至TL3时,通过闭环控制,可使电压由U2升高至U3,以使电机稳定运行在C点。同样,假如某一时刻下电机稳定运行在B点,电机负载为TL2,当负载由于扰动由TL2减小至TL1时,通过闭环控制,可使电压由U2降低至U1,以使电机稳定运行在A点。将A、B、C、F、G连起来即为A点对应转速下系统工频调压闭环特性。当电机的给定转速发生变化时[11],也可通过调压闭环对电机的端电压进行控制,进而使电机稳定运行在给定转速。
1.3 工频调压闭环控制策略探讨

图3 交交变频器工频调压闭环原理图
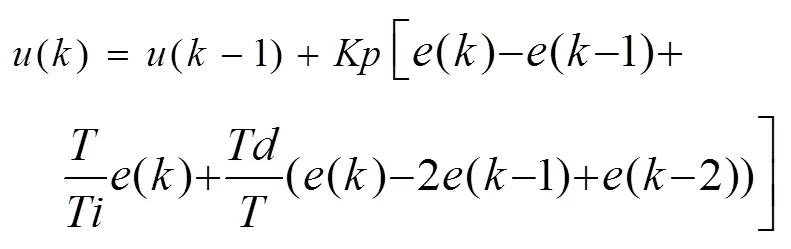
由图3可知,本文通过PID控制器来对调压时间常数进行控制,从而达到闭环调压的目的。其中PID控制器采用增量式PID控制算法,其算法公式如式2所示。




2 仿真验证
如图4所示8N.m负载条件下,转速给定突变时的闭环控制效果,首先使电机在给定转速为1200 r/min条件下起动,可以看出经过0.8s电机即起动至给定转速下稳定运行,在2.5s时将给定转速切换至1400 r/min,经过0.5s电机转速由1200 r/min迅速过渡至1400 r/min的转速下稳定运行,从图4中的转速波形可以看出,采用调压闭环控制后,电机对给定转速的响应较为迅速,在闭环调节的过程中超调量较小,稳态运行时几乎无静差。
为进行一步说明工频调压闭环的抗干扰性能,这里将对负载突变时的闭环控制效果进行仿真分析,如图5所示。
如图5所示为闭环条件下,负载突变时的转速、转矩波形,由图可知,起始时刻给定转速为1300 r/min,电机带动8 N.m的负荷经过0.9 s起动至1300 r/min的转速下稳定运行,在2.5s时电机负载由8 N.m突加至15 N.m,并在3.6s再由15N.m突减至8 N.m,由图5中电机的转速波形可以看出,在负载突加、突减的过程中,电机的转速波动很小,一直维持在1300 r/min的转速下运行,由此可以看出在工频段采用闭环控制策略后,系统有着较好的抗干扰性能。
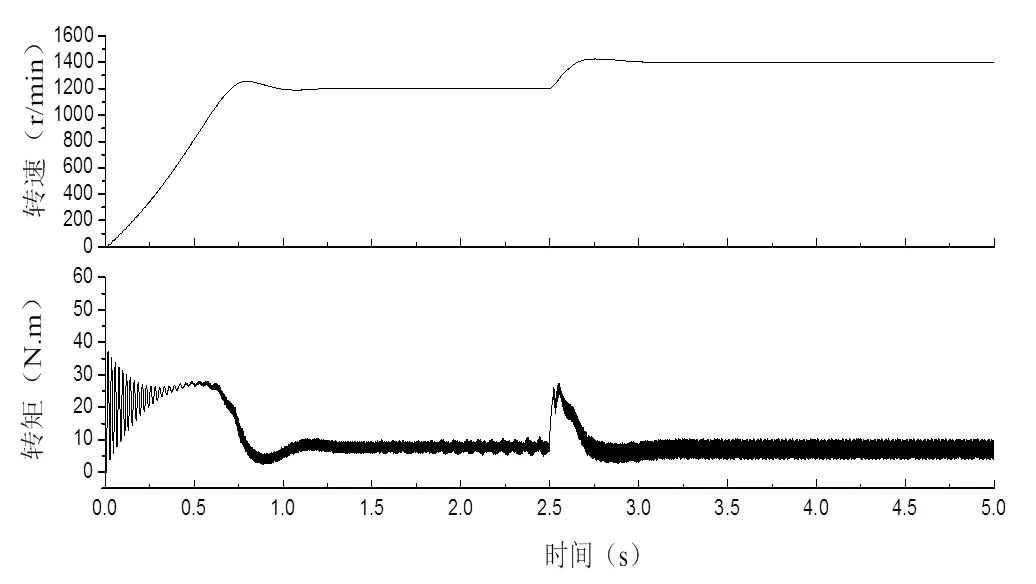
图4 给定转速突变时闭环控制效果
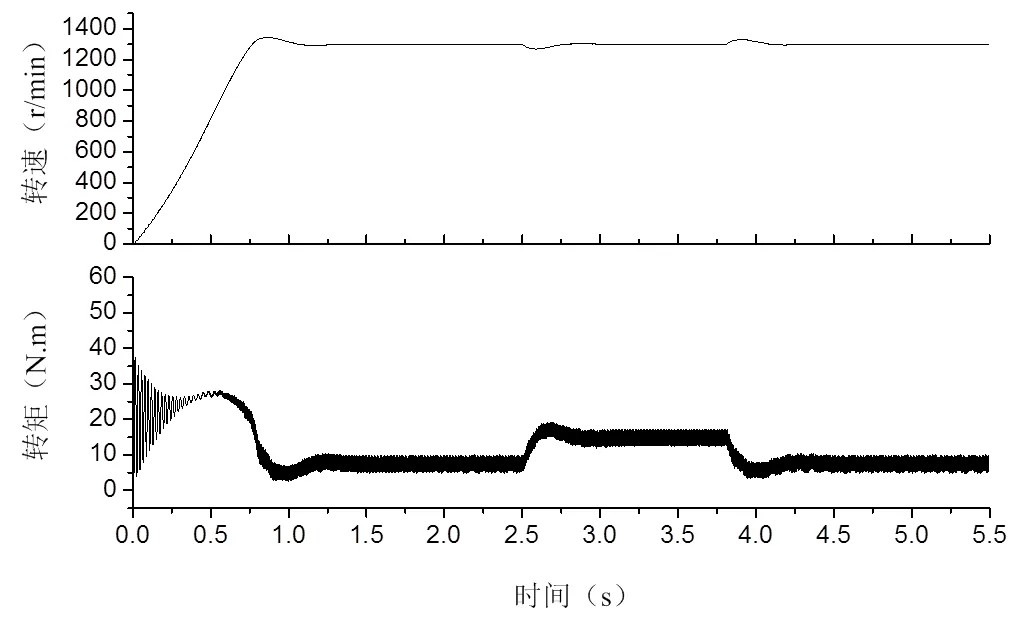
图5 负载突变时闭环控制效果
电机的软起动过程中,在高频段采用变频与调压相结合的控制策略,为了说明由变频段切换至工频调压段的控制效果,这里对8 N.m负载条件下,电机由37.5 Hz切换至50 Hz条件下的过渡过程进行仿真相应的分析,如图6所示。
由图6可知,起始时刻,电机带动8 N.m负载在37.5 Hz条件下起动并稳定运行于1100 r/min的转速下,在2.5 s时,电机由37.5 Hz条件下向50 Hz工频条件下过渡,在工频调压闭环的作用下,经过0.3 s电机由1100 r/min过渡至1300 r/min的条件下稳定运行,在4.5 s时给定转速切换至1400 r/min,经过0.2 s电机由1300 r/min过渡至1400 r/min的转速下稳定运行。可以看出,由变频段向调压段过渡过程中电机的转速较为平稳,且在工频调压闭环的作用下,电机可根据需要过渡至相应的转速下稳定运行。

图6 37.5 Hz向50 Hz过渡时的转速、转矩波形
3 实验验证
为验证工频段调压闭环控制策略的性能,在试验中首先使电机在给定转速为1400 r/min的条件下起动,工频段调压闭环控制策略下电机的转速波形
如下图所示:
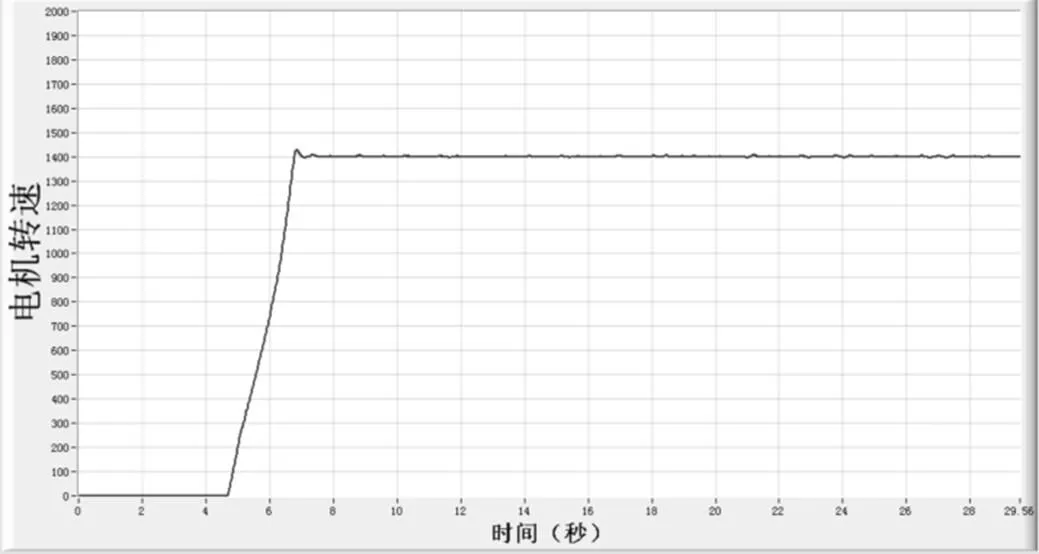
图7 给定转速1400 r/min时电机转速波形
从图7可以看出,电机经过0.7 s起动到1400 r/min并稳定运行,在闭环调节的作用下,电机转速超调量较小,能够稳定运行于1400 r/min,且稳定运行时几乎无静差。
如图8所示,为工频段下给定转速突变时电机的转速波形,首先使电机在给定转速为1200 r/min的条件下起动,在闭环控制的作用下,经过1.2 s电机起动至1200 r/min左右稳定运行,然后在t=14.5 s时,将给定转速切换至1400 r/min,可以看出在闭环控制作用下[16],电机能够迅速对给定转度的变化做出反应,经过0.5 s左右,电机转速由1200 r/min过渡至1400 r/min转速下稳定运行,可以看出工频段的调压闭环对电机转速有着较强的调节能力。

图8 给定转速突变时电机的转速波形
为对电机由高频段向工频段过渡时工频调压闭环的调节能力进行实验分析,如图9所示为实验中由变频段向工频调压段过渡时的转速波形,选择的过渡频段为37.5 Hz,切换过程中,通过调压闭环来控制电机在给定转速下稳定运行。
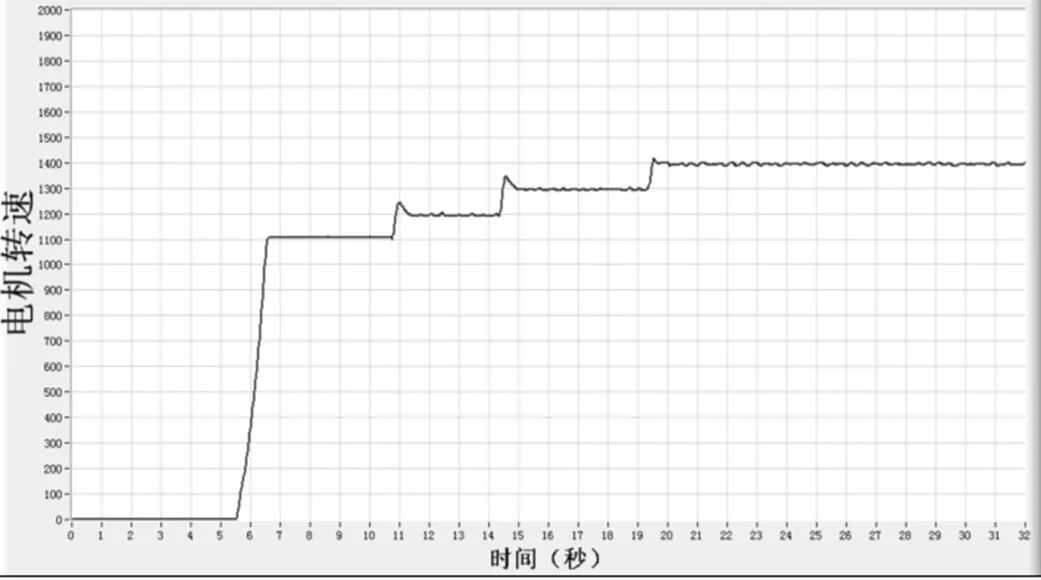
图9 37.5 HZ向50 HZ过渡时的电机转速波形
由图9可知,首先使电机在37.5 Hz、235 V条件下起动,经过0.5 s电机起动至1100 r/min的转速下稳定运行,在t=10.8 s时,向变频器发出频率切换指令,使电机由23.5 Hz条件下向50 Hz条件下过渡,在闭环控制的作用下,先使电机工频条件下稳定运行在1200 r/min的转速下,逐步改变给定转速,使电机由1200 r/min逐步切换至1300 r/min,并最终稳定运行在额定转速1400 r/min附近。通过实验分析,可知六脉波交交变频器可方便的实现变频与调压的相结合,且在高频段通过设置调压闭环,可以实现变频段向调压段切换时的软过渡,通过调压闭环的作用可使电机起动至额定转速附近稳定运行。
4 结论
本文采用增量式PID控制算法对调压时间常数进行控制,将调压时间常数偏移量作为控制量形成闭环,给出了采用增量式PID控制算法的PID控制器的物理模型,适用于从过度频段37.5 HZ到工频段50 HZ过渡过程中的软启动。并通过对工频段调压闭环控制策略进行了相应大量的仿真与实验分析,结果均表明:通过闭环控制可实现变频段向工频调压段切换时的软过渡。
[1] 李良钰. 交流调速技术概述与发展方向[J]. 机械制造与自化, 2008(3): 154-156.
[2] 肖倩华, 廖世海. 现代交流调速技术的应用和发展[J]. 科技场, 2005(6): 114-116.
[3] 林辉. 异步电动机的软起动技术[J]. 电机技术, 2010(3): 32-34.
[4] 庞元俊, 于励鹏, 王佳. 电动机软起动技术与应用[J]. 矿山机械, 2007(11): 127-129.
[5] 冒海峰, 朱桂平. 异步电动机软起动技术探讨[J]. 硫磷设计与粉体工程, 2004(3): 34-38+53.
[6] 姚剑. 软起动技术在电机控制中的应用[J]. 中国设备工程, 2002(7): 21-22.
[7] 曾聪, 杨世祥, 谭理武, 等. 电动机软起动技术及应用[J]. 电气开关, 2005(6): 25-27.
[8] 杜庆楠, 王新, 陈立香. 相控变流器和变频器双变量控制理论的研究[J]. 煤炭学报, 2000(S1): 154-157.
[9] 周卫平, 杨宣访, 师维, 等. 三相三线有源电力滤波器新型控制策略[J]. 电力系统保护与控制, 2018, 46(10): 55-60.
[10] 熊家祚, 张能, 翟党国, 等. 大规模电力电子设备接入的电力系统混合仿真接口技术综述[J]. 电力系统保护与控制, 2018, 46(10): 152-161.
[11] 翟保豫, 马涛, 李开鑫. 220 kV变压器中性点间隙过电压保护与中性点间隙距离的配合分析[J]. 电气技术, 2018, 19(4): 54-57.
[12] 李华, 方晓春, 林飞, 等. 异步牵引电机方波单电流闭环控制策略及其参数鲁棒性分析[J]. 电工技术学报, 2018, 33(9): 2034-2043.
[13] 李拓, 杜庆楠. 基于TMS320F28335的三相感应电机矢量控制系统的研究[J]. 软件, 2018, 39(3): 130-135.
Study on 6-pulse Double-Variable Cross-Frequency Control Power Frequency Regulator Closed-loop
LI Tuo1, LI Ya-min2, DU Qing-nan1, CUI Zhan-qi1
(1. School of Electrical Engineering and Automation, Henan Polytechnic University Jiaozuo 454000 China; 2. Zhengzhou Institute of Science and Technology Zhengzhou 450064 China)
Based on the six-pulse bivariate cross-converter based on, in order to avoid the motor in the soft start process from the variable frequency band (below 50 HZ) to the power frequency (50 HZ) voltage regulator section when the frequency difference caused by the larger The mechanical properties are softened, which improves the control performance of the motor starting to the common-band rotation speed, and suppresses the instantaneous inrush current caused when switching from 37.5 HZ to 50 HZ, so as to meet the requirements of the industrial control on the speed regulation accuracy. Through the use of incremental PID control algorithm to control the time constant of pressure regulation, the pressure control time constant offset is used as a control quantity to form a closed loop, and closed-loop adjustment is realized. A large number of simulation and experimental results show that under the effect of closed-loop regulation, the overshoot of the motor speed is small, and it can be operated with stability of almost no static difference at 1400 r/min, and the switching from the variable frequency band to the power frequency voltage regulation section is realized. Soft over.
Six-pulse bivariate; Cross-conversion; Power frequency regulation; Closed-loop
TM343
A
10.3969/j.issn.1003-6970.2018.08.020
李拓(1991-),男,硕士研究生,主要研究方向:运动驱动与控制;李亚民(1992-),男,助教,主要研究方向:电力电子与电气传动;杜庆楠(1958-),男,教授,主要研究方向:自动控制、电力电子技术与交直流调速;崔占奇(1990-),男,硕士研究生,主要研究方向:电力电子与电力拖动。
本文著录格式:李拓,李亚民,杜庆楠,等. 六脉波双变量交交变频工频调压闭环研究[J]. 软件,2018,39(8):94-99
