现代有轨电车智能交通系统优先控制策略方案研究
2018-09-11
0 引言
目前,有轨电车作为城市公共交通的重要组成部分,结合我国现有公路交通的通行方式,综合考虑现代有轨电车、汽车、行人等交通要素,研究一种相对科学合理的通行相序方案,合理制订有轨电车优先通过平交路口的控制策略方案极为重要。
1 现状
1.1 国内外应用情况
有轨电车通行方式一般包含同等条件下于路口处的通行准许和通行顺序。通行顺序方面,目前在国内一般不采用优先控制模式,即有轨电车不设置专用信号灯或依赖于路口公路信号灯,在通行顺序上有轨电车与道路汽车无异;另一种是采用有轨电车优先模式。欧洲学者考虑到有轨电车作为大容量的公共交通设施,提高有轨电车的运行效率在一定程度上可以带动交通系统整体效率,因而在欧洲一些道路运行中渗透了有轨电车通行优先的思路,但具体的实现方式各异,效果也不尽相同。
1.2 国内外优先控制主要模式
智能交通优先控制策略分2种:无条件绝对优先和有条件相对优先。无条件绝对优先,其目的是实现有轨电车完全不停车通过路口;有条件相对优先,其目的是尽可能使有轨电车不停车通过路口,当停车时,尽可能减少停车时间。
2 优先控制策略分析
2.1 优先控制思路
2.1.1 无条件优先控制策略
假设在A点检测到有轨电车到达,到达停止线的行程时间为T,信号机判断T时间后的相位运行状态:
(1)若判断有轨电车到达路口时有轨电车相位为绿灯,不需要调整信号方案,有轨电车可不停车通过停止线;
(2)若预测有轨电车到达路口时有轨电车相位为红灯,则进一步判断电车到达时刻正在执行的相位是否已超过最小绿灯时间:若已超过最小绿灯时间,红灯相位执行完最小绿灯时间后切换到有轨电车所在相位;若未超过最小绿灯时间,则在前一相位结束时刻切换到有轨电车所在相位。
二级优化:A检测器检测到电车信号,并按照上述思路执行无条件优先控制,可确保电车到达停止线时相位状态基本处于优先相位。为了进一步减少随机性因素对优先控制效果产生的影响,利用B检测器检测信号对优先方案进行二级优化。当B检测器检测到信号时,根据电车从B检测器到停止线的行程时间判断电车相位执行状态,若存在相位尚未到达或时间不足情况,需对控制方案进行二次调整,确保电车通过,消除随机性因素的影响。
根据C/D检测器检测到路口是否占用,进行最大路口占用时间控制,在占用时间内保持公交相位为绿灯,当检测到路口出清或超过最大占用时间阈值时,清除信号优先控制。
无条件优先的相位为与电车相位同放的社会车辆相位,电车相位跟随执行,社会车辆可通行。
图1为无条件优先控制策略示意图,该处以社会车辆相位为示例,在实施时,需单独配置电车相位,并跟随社会车辆相位执行。

图1 无条件优先控制策略
2.1.2 有条件优先控制策略
有条件控制方式包括绿灯延长、红灯早断和相位插入3种方式。3种不同的优先控制方式根据车辆到达路口的时刻和当前信号控制方案执行情况进行选择触发,下文对每种策略下有轨电车驶过交叉路口后的相位变化进行阐述。
假设某一路口未采用任何优先策略,其信号控制方案如图2所示。

图2 未采用任何优先策略
(1)绿灯延长。
当触发时刻电车相位为绿灯,且剩余绿灯时间不足以保证电车通过,则执行绿灯延长。假设绿灯延长时间为9 s,根据一定的算法得出每个非优先相位放行绿灯时间为30 s,交通信号控制方案如图3所示。

图3 绿灯延长控制策略
(2)红灯早断。
若电车相位为当前相位的后一相位(相位紧邻),则采用红灯早断控制。判断当前相位是否执行完毕最小绿灯时间,若执行完毕,则结束当前相位并切换到电车相位,交通信号控制方案如图4所示。

图4 红灯早断控制策略
(3)相位插入。
若电车相位为非当前相位的后一相位(中间间隔1-N个相位),则采用相位插入控制。判断优先时刻当前相位是否执行完毕最小绿灯时间,若执行完毕,则中断当前相位,插入电车专用相位;若未执行完毕最小绿灯时间,则待执行完毕后插入。假设专用相位为10 s,交通信号控制方案如图5所示。
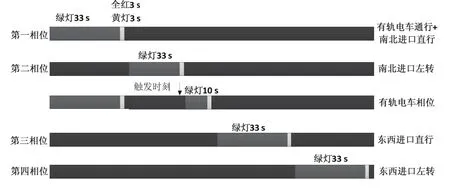
图5 相位插入控制策略
有条件优先中插入的相位为有轨电车专用相位,时长仅为电车通过路口的时间,在此期间社会车辆无通行权。
2.2 检测器位置布置原则
对于每个道口,均设有A、B、C、D 4个检测信标,分别对应预告、到达、进口、出口等状态。
2.2.1 A点布置原则
A点位置检测有轨电车到达信号并主要用于无条件优先控制,因此A点检测器位置与路口间距离较大,以保障拥有足够的时间进行相位切换,保障路口行人通行安全。
其基本位置位于距离路口400 m处,依据为:有轨电车从A点行驶到停止线的时间需大于路口交叉方向的最小绿灯时间,按照电车以平均速度14 m/s(50 km/h)行驶,路口交叉相位最长的最小绿灯时间为30 s(一般大路口使用30 s均可满足行人过街需求,而实际值则比30 s小很多,此处需要按照最长时间计算)。在岔区和路口重叠区,有轨电车路口信号灯的位置可能会做出调整,A点的布置也将进行相应调整。
(1)上游出口处无停靠站。
若路段长度大于440 m,A点检测器设置位置为距离路口400 m处;若路段长度小于440 m,A点检测器可设置在上游路口出口处(图6)。

图6 A点位置
(2)上游出口处设有停靠站。
若站台出口到路口距离大于450 m,A点检测器设置位置为距离路口400 m处(图7)。

图7 A点位置
若站台出口到路口距离小于450 m,大于(120+50)m,A点检测器位置为距离站台出口下游约50 m处。预留50 m的目的在于消除车辆停靠站时定位数据存在静态漂移现象的影响,避免定位误差导致的优先控制误触发(图8)。

图8 A点位置
若站台出口距离较小,且下游路口在切换相位时所需时间大于电车行驶到停止线的行程时间时,按照“站台出口到路口距离小于(120+50)m”布设A检测器,即若站台出口到路口距离小于(120+50)m,A点检测器位置为停靠站上游位置,由于停靠站时间存在随机性,A点布置以时间为依据:A检测器检测到车辆时,其行驶到停止线的时间(包含停站时间)大于相位调整时间(30 s)。
(3)下游路口进口处设有停靠站。
若下游路口进口处设有停靠站,则按照上述“站台出口到路口距离小于(120+50)m”情况设置A点检测器。
上述为A点检测器布置需遵循的基本原则,均基于30 s相位调整时间,由于不同路口的物理结构不同,执行优先控制时相位调整时间也不尽相同,因此应根据路口实际情况对A点位置进行单独配置。
2.2.2 B点布置原则
B点检测器主要功能:对于无条件优先路口,在A检测器触发无条件优先控制后,根据电车到达路口情况执行二级优化控制,确保电车不停车;对于有条件优先路口,检测车辆到达路口情况,并执行有条件优先控制。B点的布置原则主要针对有条件优先中的相位插入,需满足相位插入时拥有充足的时间进行相位过渡,同时也能满足绿灯延长和红灯早断算法的感应需求。
B点检测器基本位置位于距离路口100~120 m处,依据为:当执行相位插入时,插入有轨电车专用相位,需保证正在执行的其他相位拥有足够的时间进行过渡,过渡时间一般为3 s绿闪+3 s黄灯+3 s全红 =9 s(此为最大值,实际可能没有全红,实际时间比该时间小),按照路口通行最高限速11 m/s(40 km/h)计算,B点位置需布设在距离停止线100~120 m处。在岔区和路口重叠区,有轨电车路口信号灯的位置可能会做出调整,B点的布置也将进行相应调整。
(1)入口处无停靠站,B检测器布置在距离停止线100~120 m处(图9)。

图9 B点位置
(2)入口处设有停靠站且停靠站出口与停止线距离大于120 m,B检测器设置在距离停止线100~120 m处(图10)。

图10 B点位置
(3)入口处设有停靠站且停靠站出口与停止线距离小于120 m,采用RTS技术,即司机在发车时按下RTS按钮,触发优先请求(图11)。

图11 B点位置
2.2.3 C点布置原则
C点检测器主要功能是判断路口是否处于占用状态,并执行有轨电车相位驻留控制。C点主要根据现场情况制订布置方案。
C检测器布置在距离停止线1 m处(图12)。

图12 C点位置
2.2.4 D点布置原则
D点检测器主要作用是判断路口出清,并解除相关的优先控制。D点的布置原则为,以确保行车安全为前提,当车身完全驶出路口时触发路口出清信号。
D点检测到有轨电车时,确保电车已经离开交叉口,因此D点检测器布设位置为出口下游40 m处(一个车身长度)(图13)。

图13 D点位置
2.3 检测器异常处理策略
2.3.1 A、B检测器异常处理策略
对配置为无条件优先的路口,A检测器为主要触发控制检测器,B为调整检测器,2个检测器均检测到信号时,执行完整的二级优化控制策略。若A检测器检测到车辆,则根据A执行无条件优先控制;若A未检测到车辆而B检测到,则根据B执行(如果有条件优先控制可以保证不停车,或者让电车等待时间更少,该处也可根据优先效果降级为有条件优先控制,需视实际情况确定)。
对配置为有条件优先的路口,若A未检测到车辆而B检测到,优先控制不受影响;若B检测器未检测到车辆到达,则不执行有条件优先控制,仅执行常规信控。
2.3.2 C、D检测器异常处理策略
C/D点配合完成优先控制消除,若C/D无法检测到信号,则有轨电车相位跟随机动车相位正常执行;若检测到车辆一直占用路口,占用状态不消除,则在控制算法中设置时间阈值,触发优先控制后,超过时间阈值将自动解除优先控制。
3 执行优先控制的条件
(1)执行绝对优先的条件:路口交通饱和度小于特定阈值;A、B检测器至少其中之一无故障;路口信号机未执行优先级更高的控制,如勤务、手动控制等;信号机无严重故障,未触发降级控制。
(2)执行相对优先的条件:路口交通状况不满足绝对优先的饱和度阈值,无法采用绝对优先时,可采用相对优先;相位早断需满足路口饱和度阈值;A、B检测器至少其中之一无故障;路口信号机未执行优先级更高的控制,如勤务、手动控制等;信号机无严重故障,未触发降级控制。
(3)执行相对优先控制时,以下情况可能导致路口停车:压缩方向的饱和度均高于调整阈值,导致相位压缩时间不足,算法执行失败;按最大程度进行相位调整后,电车到达停止线时仍然未过调整相位的最小绿灯时间,为保证行人安全,必须等待最小绿灯时间完毕之后再进行相位切换;突发事件等随机因素影响,如触发绿灯延长控制后,有轨电车中途由于突发事件停车延误,错过延长时间。
4 结语
根据上述方案的讨论可知,无条件优先控制主要采用插入有轨电车方向相位的方式实现,其目标是实现电车完全不停车通过路口。考虑交叉路口行人过街等安全因素,执行无条件优先控制时需要充足的相位调整时间, 因此采用A检测器进行控制策略触发。同时,考虑到电车行驶过程中存在随机性因素(如驾驶行为差异性等),在利用A检测器进行优先控制的基础上,采用B检测器对控制策略进行二级调整,由于B检测器距离路口较近,识别进入路口状态比较准确,可以确保无条件优先控制效果。
有条件优先控制主要采用绿灯延长、红灯早断和插入电车专用相位的方式实现。其目标在于尽可能使电车不停车通过路口,当出现停车时,尽可能缩短停车时间。由于有条件优先控制为精细化的信号控制,如绿灯延长时,可能只延长几秒钟,需要对电车到达路口的状态进行准确检测,因此主要采用B检测器来实现有条件优先控制。
参考文献:
[1]吴胜权.城市现代有轨电车工程基础[M].北京:机械工业出版社,2016.
[2]喻智宏,孙吉良,申大川.有轨电车通信信号技术与智能交通系统[J].城市交通,2013(4):44-51.
[3]叶辉.现代有轨电车信号系统平交路口信号灯控制策略研究[J].商品与质量,2016(26).
[4]吴胜权,黄振辉,曹源.有轨电车路权配置与信号系统选择[J].中国铁路,2014(8):97-99.
