一种大型养路机械车辆作业防撞系统
2018-09-11杨波
杨 波
(中国铁路总公司 发展和改革部,北京 100844)
随着我国铁路装备的不断发展,大型养路机械在铁路线路养护作业中的使用范围也在不断增加,有效提高了线路养护质量和作业效率。但是,由于大型养路机械施工作业大多环境较为恶劣,施工组织复杂,在其作业过程中,避免由于人为、外界干扰以及天气等因素造成的车辆碰撞,保证大型养路机械作业安全是一项亟待解决的问题。从目前的大型养路机械运用状况看,因大型养路机械作业时一般在一个天窗由多台车辆编组后进入同一区段内,在作业区间脱钩后每辆车分别进行独立作业,由于大型养路机械之间无法获取彼此的位置和速度信息,现有情况主要通过车辆司机目视确定。在隧道、夜晚和能见度不好的情况下,极有可能发生相撞事故,造成人员伤亡和财产等不必要的损失。因此增加一套大型养路机械作业过程中的相互距离实时监测及防碰撞报警系统,对提高大型养路机械施工作业安全有着重要意义。
大型养路机械防撞系统通过GPS定位、激光测距、轮径脉冲计数等手段实现位置定位及相互距离判断,采用数传电台及4G网络模块实现车辆通信,车辆间相互距离的实时监测结合当前车辆速度评判,最终达到车辆防碰撞预警功能。
1 系统方案
1.1 设计目标
在行车过程中,系统能实现多台大型养路机械的自动编组、自动排序、智能定位、语音预警和倒车影像等功能。不需要任何人工介入,大型养路机械司机通过本系统能实现编组之间车辆的防撞和安全驾驶。通过浏览器访问Web系统,用户可查看当前大型养路机械编组的作业区间和作业情况,并对车辆的防撞预警和设备运行情况等信息进行管理分析。
1.2 硬件组成
大型养路机械防撞系统硬件主要由轮径脉冲设备、激光测距设备、摄像头、GPS模块、电台、显示器和工控机构成。其中轮径脉设备包括正交编码器和脉冲高速计数器,正交编码器安装在车轮位置,脉冲高速计数器安装在车体内;激光测距设备有两个,分别安装在车头和车尾,用于测量相邻两车间的距离;摄像头有两个,分别安装在车头和车尾,监视车辆两端的视频;显示器有两个,分别安装在车体内的两个司控台位置,显示信息相同。具体设备结构图如图1所示。

图1 设备结构图
1.3 通信设计
大型养路机械编组之间通过数传电台通信,与Web管理服务器之间通过4G网络通信。系统编组和通信示意图如图2所示。
2 系统功能
2.1 自动编组

图2 系统编组通信示意图
大型养路机械起机后,系统自动开启,本车GPS、速度等信息以广播的方式向其他车辆发送。为了防止将其他非实际编组车辆排除在外,采用两车距离和速度进行比较判断。判断的基本思路为:(1)通过数传电台获得其他车辆的GPS、速度等信息,与本车GPS、速度信息进行比较;(2)如果两个GPS之间的距离小于设定的值,并且速度差值也小于设定的值,则认为车辆为同一编组;(3)在大型养路机械没脱钩之前,系统反复进行编组判断,确保编组的正确性;(4)若脱钩作业后,则不再进行编组判断。
2.2 自动排序
自动编组完成后,系统根据GPS和激光距离信息进行编组的自动排序。
排序的思路为:(1)激光测距大于预设值,确定为编组中第一辆或者最后一辆大型养路机械;(2)通过两个GPS的距离值,获得同一时刻下本车与其他轨道的距离;(3)根据距离的大小完成编组中车辆的排序,确定编组中所有大型养路机械的前后车关系。
2.3 防撞预警
在大型养路机械到达作业区间脱钩作业后,系统通过数传电台获得相邻车辆的最新行驶距离,行驶方向,速度等信息。通过防撞预警模型算法,计算出两个大型养路机械之间的安全距离值。当两个大型养路机械之间实际距离小于安全距离时,系统进行声光报警,提醒司机存在相撞风险,注意行车安全。
防撞预警模型算法是大型养路机械作业防撞系统的核心,算法核心输入数据为大型养路机械当前位置和其移动速度,通过模型算法给出大型养路机械防撞预警信号算法的主要流程为:(1)大型养路机械编组挂钩行走时,不需考虑防撞预警,脱钩信号依据激光测距得到的前后车距判断;(2)当激光测距信号大于设定值,判断车辆脱钩,所有编组内大型养路机械将自身当前里程初始化为0;(3)根据轮径脉冲的计数累计获得大型养路机械从初始化里程处移动的位置;(4)根据GPS信号得到的大型养路机械运行距离与轮径脉冲计数累计值做相互检校,计算车辆当前位置;(5)利用电台及4G模块发送大型养路机械的车辆编号及当前位置信息,通知接受同一编组内其余大型养路机械的位置信息;(6)利用轮径脉冲的时间间隔计算大型养路机械的移动速度,根据速度和前后相对位置关系计算预计相遇时间,对于小于阈值的计算值,进行防撞预警。
2.4 倒车影像
大型养路机械前后安装摄像机,当车辆行驶时,显示屏上显示车辆行驶方向的视频影像,如果大型养路机械进行倒车时,司机可以通过显示屏查看车辆行驶方式的情况,防止撞到施工人员或者后方作业车辆等事故的发生。为了保证系统的可追溯性,倒车影像功能保存最近7天的录像,以供用户查阅。
2.5 Web服务
用户可以登录到Web服务器,在首页查看当前大型养路机械编组的作业区间和作业情况。同时,Web端还具备数据查询和报表导出功能。输入某台大型养路机械车辆编号后,可查询指定时间范围内此车辆发出的所有防撞预警信号以及信号发生时车辆速度、车辆位置、前后车距等信息。此外,系统还可以查询指定时间范围内车辆的运行轨迹坐标及运行轨迹图。所有的Web端查询结果均支持报表导出,方便管理人员了解大型养路机械防撞预警和设备运行情况。
3 系统软件设计
3.1 车载软件实现
系统启动后,通过串口采集GPS,激光测距,轮径脉冲计数等信息,并通过电台发送本车信息和接收其他车辆信息,通过显示器将车辆编组信息,运行情况展示给用户查看,达到一目了然的效果。在车辆行驶到作业区间过程中,系统完成大型养路机械的自动编组,自动排序;在车辆到达作业区间脱钩作业后,由预警算法模块计算出本车与相邻车辆之间刹车需要的安全距离,如果安全距离大于本车与相邻车辆的实际距离,将进行声音报警,提醒司机存在相撞风险。在确定报警信息后,可以按下取消声音播报按钮,停止声音播报。经过规定的时间后,防撞系统如果再次产生报警,将继续进行声音报警。系统流程如图3所示。
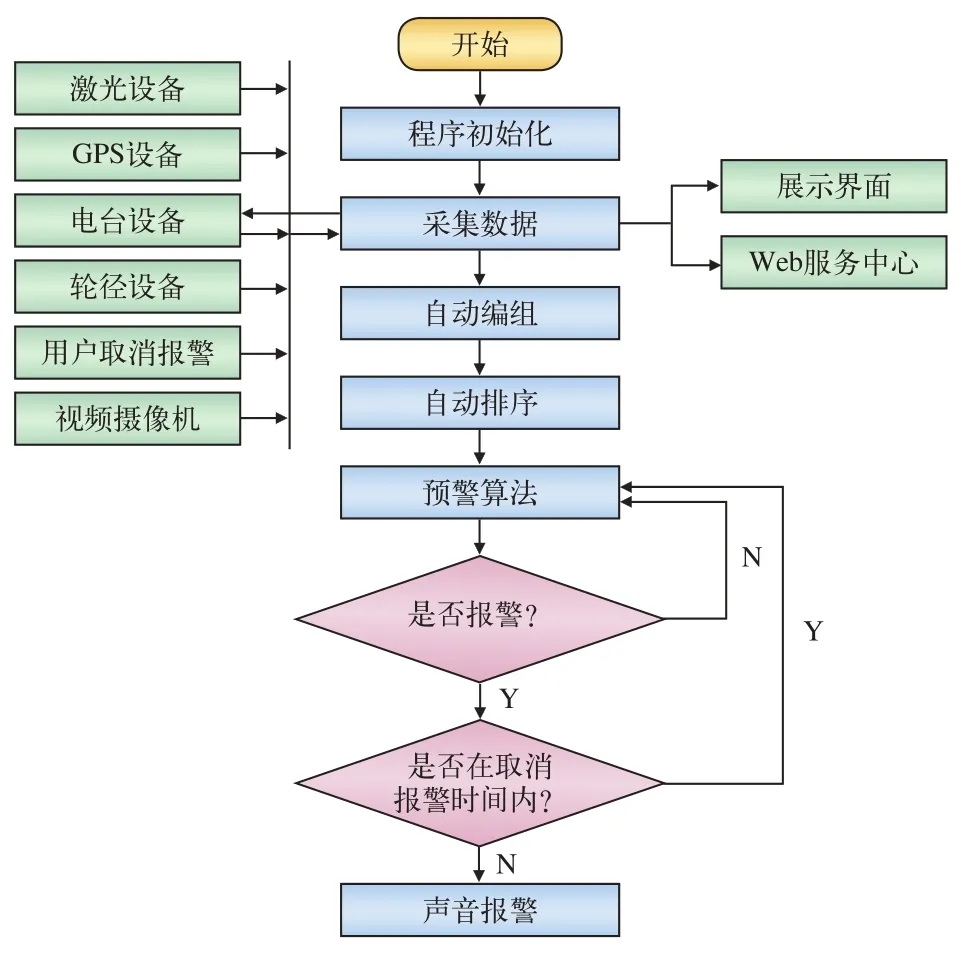
图3 系统流程图
3.2 Web服务软件
Web服务器主要有2个功能:(1)接收大型养路机械上传的信息,并存储到内存数据库和MySQL数据库;(2)提供BS访问,能在浏览器上基于GIS地图看到大型养路机械运行的情况;能在信息查询页面查看大型养路机械的详细信息和异常信息。
Web服务器使用Java语言开发,运行在Linux系统上,对外开放2个HTTP端口:8008用于与大型养路机械通信,8080用于客户使用浏览器访问(如果与现有调度中心端口冲突,可以配置成80,或者其他端口号)。
大型养路机械作为客户端,与服务器的通信全部采用HTTP协议,消息体使用Json格式。服务器收到大型养路机械的上报消息后,需要更新内存数据库Redis,并将数据存入MySQL数据库供详细查询和分析。另外,收到大型养路机械的数据请求时,需要查询Redis并将对应的数据应答给客户端。
客户使用浏览器作为客户端,主要实现的功能有:(1)系统默认展示GIS地图页面,能在地图上实时动态展示所有大型养路机械,并且鼠标移到该大型养路机械时,能显示该大型养路机械的详细信息;(2)在收到大型养路机械预警等信息时,还能用不同的颜色体现该大型养路机械的状态;(3)显示车辆的历史轨迹;(4)对车辆进行管理;(5)保存防撞装置的设备异常、告警等信息,并进行统计分析;(6)在详细信息查询页面,可以按照指定的搜索条件(GFC系统唯一ID、车号、时间范围等),查询满足条件的该大型养路机械运行过程中的所有详细信息、设备异常信息等;(7)其他管理功能。
3.3 系统软件界面
车载软件用于司机或车上工作人员查看编组的走行情况,软件可通过鼠标点击切换界面,查看编组走行作业情况,提供声光报警。当防撞预警时,用户也可以通过显示界面按钮取消预警。显示界面如图4所示。

图4 车载软件界面
Web服务软件可提供用户远程访问,获取编组的实时信息,并告警、设备异常等信息进行统计分析管理。用户点击主菜单区域和子菜单区域,在内容区域显示出菜单关联内容。软件界面如图5所示。

图5 Web软件界面
4 结束语
大型养路机械车辆作业防碰撞系统通过GPS、激光测距、轮径脉冲等进行相互配合和校验,实现了大型养路机械车辆的精确位置定位。系统通过车载电台和4G网络双备份的冗余设计实现了车辆间的通信可靠性。
在现场测试中,系统可实现60 km/h的车速下,提前1 min以上进行车辆碰撞预警,有效保障了大型养路机械的作业安全。下一步的工作计划是:加装微波通信等模块,确保极端条件下的碰撞预警信号能够提前到3 min以上。
