基于隧道磁电阻传感器的磁探测技术
2018-09-11胡必尧邓甲昊刘士川
胡必尧,邓甲昊,侯 卓,刘士川
(北京理工大学机电动态控制重点实验室, 北京 100081)
0 引言
对近炸引信系统而言,它们均通过探测器来获取目标信息。这些探测器由于所借助的物理场不同而形成了不同的探测体制,主要有无线电、激光、红外等。其中磁探测体制具有抗电子干扰能力强,测量结果不受雨、雾等恶劣环境影响的优点。同时,战场上的军事装备如坦克和潜艇等均是铁磁性物质,磁探测作为一种借助保守物理场的探测方法具有天然的优势。磁引信系统是磁探测的一种典型应用,而传统的磁引信大多基于金属涡流效应、电磁感应及霍尔效应。但利用该原理进行目标探测时存在高温环境下效果差,探测灵敏度低以及对目标磁场要求较强等缺点。若要进一步增强磁近炸引信的抗干扰能力,提高对目标的毁伤概率,就必须寻求一种具有良好软磁特性的新兴材料作为磁引信探测电路的敏感元件,使引信探测器的分辨率达到nT量级,从而保证对微磁、弱磁信号的检测。
本文针对此问题,提出了以隧道磁电阻(TMR)传感器为磁引信探测系统的敏感元件,开展地面铁磁目标的磁探测技术研究。TMR作为TMR传感器的磁敏感元件,其磁性隧道结的两铁磁层间基本不存在层间耦合,故只需一个很小的外磁场即可实现铁磁层磁化方向的改变,引起隧道磁电阻的巨大变化,可以用于导航、制导及引信等武器系统可抵御弹道上的各种有源和无源干扰。同时,它可以直接接入集成电路,制成灵敏度高、快速响应、磁滞小、高的温度稳定性、低功耗的微型TMR磁场传感器。因此开展隧道磁传感器的应用技术研究,对磁引信的发展有重要意义。
1 机理分析
隧道磁电阻传感器的工作原理是基于隧道磁电阻效应,其敏感元件磁性隧道结结构如图1所示。左右两层是在磁场中易磁化的金属层,中间是绝缘层。当磁性隧道结放置于磁场中,两侧的金属层则发生磁化。若两金属层的磁化方向同向且平行,则进行隧穿的电子数较多隧穿电流较大,即整个磁性隧道结的电阻较小;若两金属层的磁化方向平行反向,则电子的隧穿电流较小,即整个磁性隧道结的电阻较大。磁隧道结中两铁磁层间不存在或基本不存在层间耦合,只需一个很小的外磁场即可将其中一个铁磁层的磁化方向反向,从而可导致隧穿电阻的巨大改变[1]。磁探测电路中这一变阻器件电阻的改变必引起检测电压信号的改变从而使我们获得的铁磁目标信息。

图1 磁性隧道结结构及电子隧穿示意图Fig.1 Magnetic tunnel junction structure and electron tunneling schematic
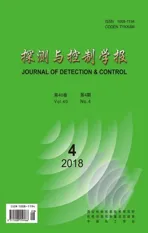
TMR磁传感器就是隧道磁电阻作为敏感元件的磁传感器,而磁传感器是众多传感器中的一种,市场上的磁传感器大致可以分为以下几类:霍尔元件、各向异性磁阻传感器、巨磁电阻传感器、隧道磁电阻传感器。表1所示为各类磁传感器性能指标的对比。可以明显的看到TMR隧道磁电阻传感器相比与其他磁传感器具有功耗低、尺寸小、灵敏度高、动态范围广、分辨率高、温度特性好等优点。
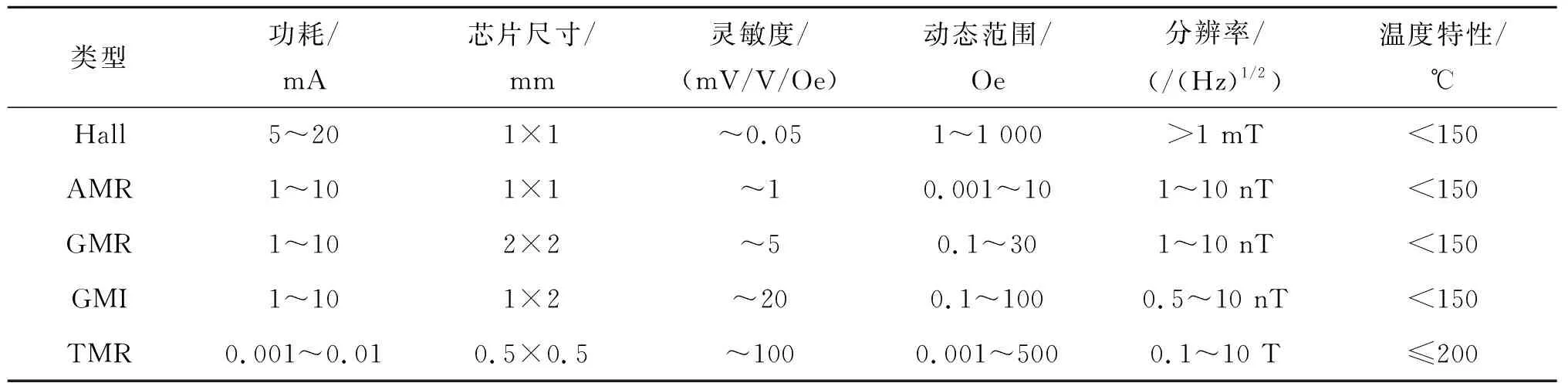
表1 各磁传感器的性能指标Tab.1 magnetic sensor performance indicators
2 TMR磁探测器设计
2.1 隧道磁电阻传感器简介
本文所采用的是TMR单轴线性传感器TMR2905。TMR2905采用了一个独特的推挽式惠斯通全桥结构设计,包含四个非屏蔽高灵敏度TMR传感器元件。当外加磁场沿平行于传感器敏感方向变化时,惠斯通全桥提供差分电压输出,并且该输出具有良好的温度稳定性。传感器的灵敏度为50 mV/V/Oe,工作温度范围为-40~125 ℃,有着宽的动态范围,较低的功耗,极低的磁滞和宽工作电压范围以及极低的本底噪声,广泛运用在微弱磁场检测、电流传感器和位置传感器中,图2列出了TMR2905传感器输出随外加磁场强度变化(外加磁场±10 Oe、工作电源1 V)的典型曲线。

图2 TMR2905传感器输出特性曲线Fig.2 TMR2905 sensor output characteristic curve
2.2 信号调理电路设计
TMR探测器是制导与引信系统获取目标信息的主要子系统。它的探测灵敏度高低直接决定了该系统的目标探测整体性能。而决定探测灵敏度的主要因素有两点:一是传感器本身的探测灵敏度,本课题采用的磁隧道传感器特性较普通磁性元件具有天然优势;二是系统探测电路的灵敏度。因此,本文基于坦克微弱磁场探测的背景着重探索提高系统探测电路灵敏度的技术途径。图3所示为信号调理电路原理框图。信号调理主要为信号的放大和滤波,中间加入运放跟随器来增加信号的驱动能力并起到电路模块隔离的作用,增大电路的抗干扰能力。

图3 信号调理电路原理框图
Fig.3 Signal conditioning circuit diagram
1)放大电路
由于TMR的输出信号来自惠斯通电桥的输出端,无缓冲,驱动能力较弱,因此,后端放大电路中选择采用适于对弱驱动传感信号进行放大的仪表放大器。仪表放大器通常由三个运算放大器A1、A2、A3组成,如图4所示。

图4 仪表放大器原理框图Fig.4 Instrumentation amplifier diagram
图中的A1、A2组成具有对称结构的差分输入端,一般情况下,R1=R2,R3=R4=R5=Rf,理论上其差模增益Ad为
(1)
输入共模信号时,RG处于断开状态,A1、A2为电压跟随器,其共模增益为1。A3将A1,A2端的差动输入信号转化为单端输入信号,其共模抑制精度取决于电阻Rf的匹配精度。
本文采用AD8421仪表放大器进行敏感信号放大,是一款低成本、低功耗、极低噪声、超低偏置电流、高速仪表放大器。在信号频率为20 kHz,放大器增益为1的情况下共模抑制比为为80 dB,即差模增益是共模增益的一万倍。且共模抑制比会随着放大倍数的增加而增加,因此放大器具有非常良好的共模抑制能力。在放大器的放大倍数小于100时,其增益带宽积为10 MHz,在满足放大需求的同时,完全可以满足信号的带宽需求。
放大电路图如图5所示,设置放大器的增益为22,放大器的增益G由电阻R1控制
(2)
放大器的输出电压为
VOUT=G×(VIN+-VIN-)+VREF
(3)
这里参考电压VREF由芯片的参考端REF定义,本文将参考端接地,即VREF=0,则输出电压
(4)

图5 信号放大电路图Fig.5 Signal amplification circuit
在目标信号强度较低的情况下,仪表放大器电路需要处理可能会存在不断增加的射频干扰,如果很强的射频干扰信号首先被仪表放大器的输入级整流,表现为直流失调误差,那即使在输出端加入低通滤波进行处理也不能去除这个误差。差分输入端,本文仪表放大器的前端的差分输入电路加入射频干扰滤波器,主要有三个目的:1)尽可能从输入端去除射频能量;2)保持每个输入端和地之间的交流信号平衡;3)在测量带宽内保持足够高的输入阻抗以避免对输入信号源的带载能力。
如图5所示,在反相端,R2和C2构成低通滤波器,在同相端,R3和C3构成低通滤波器。这两个低通滤波器的截至频率需很好的匹配,这取决与电容,电阻的精度,匹配不好共模信号易转化为差分信号。电容C4在高频段将输入路,能在一定程度上降低了低通滤波器的匹配要求,这里,C4的值应至少为C2的10倍。
输入端的抗射频干扰滤波器有两种不同的信号带宽分别为差分带宽和共模带宽。差分带宽BD为差分信号输入时滤波器的频率响应。这时的RC时间常数由两个等值的输入电阻之和以及C2、C3、C4一起决定,由于C2、C3比C4小一个数量级,相应的阻抗较小,这里计算时可以忽略
(5)
共模带宽BC为连接在一起的两个输入与地之间的共模信号带宽,即C4不影响共模信号带宽,由两个RC低通网络决定。
(6)
2)滤波电路
坦克铁磁目标的磁场一般属于频率较低的信号,频率在百赫兹量级。而传感器的输出信号会夹杂一些高频噪声信号,同时由于外界的电磁干扰和电路本身的电阻、半导体等器件所产生的噪声影响,也会导致输出的信号中夹杂一些高频信号,这些高频干扰信号放大后会直接影响到目标信号的检测,并影响测量精度。故需要在传感器的输出端进行低通滤波以消除或削弱这些不需要的高频信号,提高检测精度,进一步提高传感器的输出特性。
最常用的低通有源滤波方式主要有:贝塞尔(Bessel)滤波,切比雪夫(Chebyshev)和巴特沃斯(Butterworth)滤波这三种电路。在滤波器阶数相同时,巴特沃斯滤波器通带最平坦,阻带下降慢。切比雪夫滤波器通带等纹波,通带中幅度响应的波峰和波谷之间的差异永远相同,阻带下降较快。贝塞尔滤波器着重于相频响应,幅频响应的通带等纹波,阻带下降慢。本文低通滤波器选择需满足以下两方面:1)通带内增益应小,即通带内输出与输入的比值应保持稳定;2)考虑过渡带的衰减速度。满足截止频率条件下,衰减速度越快,效果越好。综合考虑,为满足滤波器对高频信号的抑制性能,本文选择切比雪夫低通滤波器。
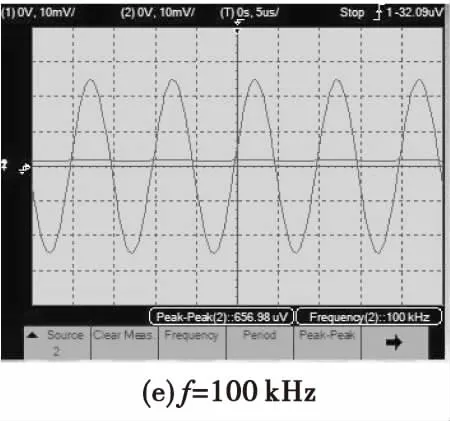
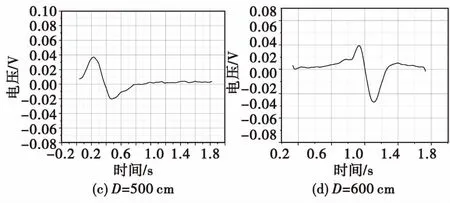
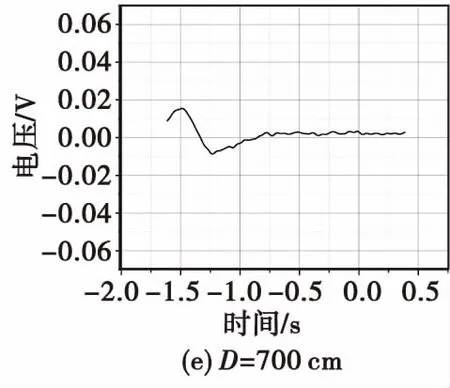
本文选择4阶低通滤波器LTC1563-2,具体电路如图6所示,电阻、电容的连接方式使之构成切比雪夫型滤波器。该滤波器由两个二阶的低通滤波器组成,如图所示。每一个二阶的低通滤波器的截至频率由三个独立的外接电阻确定,截至频率范围为256 Hz 图6 滤波电路原理图Fig.6 Filter circuit diagram 图7 滤波电路频率响应波特图Fig.7 Filter circuit frequency response bode plot 3)电源模块 常用的直流电源有低压差直流线性稳压源(LDO)与直流开关电源(DC/DC)两种。LDO是一种线性稳压器,运用在其线性区域内运行的晶体管或场效应管,从输入电压中减去超额的电压,产生经过调节的输出电压。与线性电源不同的是开关电源是让功率晶体管工作在导通和关断的状态,在这两种状态中,加在功率晶体管上的伏-安乘积是很小的(在导通时,电压低、电流大;关断时,电压高、电流小),功率器件上的伏安乘积就是功率半导体器件上所产生的损耗。 总的来说,开关电源与线性电源相比优势在于效率高,加之开关晶体管工作于开关状态,损耗较小,发热较低,不需要体积/重量非常大的散热器,因此体积较小、重量较轻。但由于开关电源工作在高频状态,抗高频干扰的能力不强,输出信号有纹波。线性电源的优势在于结构相对简单,可靠性相对较高,电流纹波率可以很容易的做到比较低。本文为提高可靠性满足电路对抗高频干扰的要求,应采用线性稳压源。但由于线性稳压源输出为单电源,这样仪表放大器在放大交流信号时,负半周的信号不能有效的进行放大,导致输出信号波形失真或不完整。综合考虑,本文采用线性电源和开关电源组合使用的方式。如图8所示为TMR探测电路的电源模块图。 图8 电源模块原理图Fig.8 Power module schematic 图中A0505T-1W为开关电源,输入电压为5 V,输出电压为±5 V。MIC29302WU为3 A的直流线性稳压源。本文采用锂电池电源供电,输入为7.4 V的锂电池电源,其输出电压Vout和电阻R7,R8的关系满足公式 (7) 为验证调理电路设计的合理性,对所设计的调理电路的放大滤波模块进行了仿真。采用Multisim软件对调理电路进行建模,输入信号用函数信号发生器产生,信号类型为正弦信号,峰峰值为50 mV,每次输入的信号频率不同分别为100 Hz,10 kHz,20 kHz,30 kHz和100 kHz。输出信号用示波器进行显示。总共进行了5次仿真实验,仿真得出的输入输出信号波形图如图9所示。从波形图分析得到输出波形的峰峰值以及失真情况如表2所示。 图9 输入输出信号仿真波形Fig.9 I/O signal simulation waveform 输入信号频率输出信号失真情况100 Hz1.1 V无失真10 kHz1.13 V相位失真20 kHz1.13 V相位失真30 kHz130.82 mV相位、幅度失真100 kHz656.98 μV相位、幅度失真 调理电路放大器的放大倍数为22,滤波器的截止频率为20 kHz,输入信号峰峰值为50 mV。在理想情况下,当输入信号的频率小于20 kHz时,输出信号的峰峰值应该为1.1 V且无失真情况;当输入信号的频率大于20 kHz时,应该无输出。由表2可以看出,在输入信号频率为100 Hz时,信号幅度放大了三倍且没有失真情况。在没有超过截止频率的情况下,随着输入频率的增加,信号的幅度放大了22倍,表明放大器成功放大了信号。但同时产生相位失真的情况。在输入频率超过截止频率后,还产生了幅度失真的情况,表明滤波器对信号进行了抑制作用。而且频率越高的信号幅度越小,滤波器对信号的抑制越明显。仿真结果表明,调理电路模块能有效地进行低频信号的放大并能抑制高频噪声干扰。 由于无法使坦克目标运动起来,本文以小汽车为探测目标进行了目标特性测试实验。以此来测试隧道磁电阻传感器探测电路对铁磁目标的探测能力。为测试隧道磁电阻传感器的探测电路的磁场探测能力,以小汽车为探测目标进行了实验。TMR探测器放置在试验台上静止不动,小汽车以一定的速度从探测器旁边驶过,得到每一次探测器的输出电压波形。实验过程中,传感器探测电路放置在引信壳体内,传感器敏感方向正对小汽车。传感器探测磁场信息并输出电压信号到示波器上显示。 如图10所示,TMR磁场探测器放置在木制实验台中间位置与小汽车的车身中部一致。探测器与小汽车之间的距离用卷尺进行测量,卷尺末端放置一个塑料瓶便于小汽车进行定位。实验开始之前, 给TMR探测器通电,此时,观察示波器基本没有输出,但存在固定频率的纹波,幅值大约几毫伏,考虑为示波器的工频干扰,周围环境基本没有干扰。实验过程中,分别以小汽车的速度以及小汽车和探测器之间的距离为变量测量了探测器的输出电压。 图10 TMR探测器汽车实验图Fig.10 TMR detector detecting car experiment chart 1)速度分析 保持TMR探测器与小汽车之间的距离为700 cm,让小汽车分别以30 km/h,40 km/h,50 km/h的速度从探测器前方驶过。得到探测器输出电压波形,由于存在示波器的工频干扰,输出波形有一定的纹波,采用Origin软件对输出波形进行平滑处理。得到TMR探测器在汽车不同速度下的输出波形如图11所示,提取探测器输出波形的正向和反向最大值得到表3。 图11 不同速度下探测器输出波形图Fig.11 Detector output waveform at different speeds 速度/(km/h)正向输出最大值/mV反向输最大值出/mV峰峰值/mV308816401118295015924 由图11可知,探测器输出波形类似于一个正弦波形,电压值先增大再减小反映了探测器前端磁场强度先增大再减小的过程。通过表3的数据可以知道,随着汽车速度的增加,探测器的输出电压变大,但变化不明显,速度每增加10 km/h,输出电压增加约3 mV。 2)距离分析 汽车在传感器正前方以50 km/h的速度匀速驶过,汽车与传感器的距离由近到远分别为330 cm,420 cm,500 cm,600 cm,700 cm。不同距离下探测器的输出电压波形如图12所示,提取波形数据得到表4。 图12 不同距离下探测器输出波形图Fig.12 Detector output waveform at different distance 距离/cm正向输出最大值/mV反向输出最大值/mV峰峰值/mV330583290420486611450037205760026426870015924 可以看出,探测器的输出波形在不同距离下有明显的变化。汽车与探测器距离越近,磁场强度越大,探测器输出值越大。3 m左右的距离输出最大值大约60 mV。5 m左右的距离输出最大值大约40 mV。距离6 m时达到26 mV,距离7 m时,探测器输出信号最大值大约15 mV。由于传统磁探测器输出变化20 mV可以准确识别目标,如果采用低信噪比信号处理手段,本探测器对小汽车的探测距离可达7~8 m。 本文提出了以隧道磁电阻(TMR)传感器为磁引信探测系统的敏感元件,开展地面铁磁目标的磁探测技术研究。设计基于TMR传感器的微磁场探测器,该探测器以TMR传感器为敏感元件,针对传感器输出信号幅值小,驱动能力弱的特点设计模拟信号调理电路。包括差分输入,射频干扰及混叠干扰滤波,敏感信号放大,高阶低通滤波以及电源模块。通过机理分析、电路设计与仿真以及汽车实验表明本文设计的隧道磁电阻微磁场探测电路的有效可行性。为提升电路的抗干扰能力,采用了以下手段:1)针对目标探测的原距离微弱磁场信号设计了射频干扰滤波器和抗混叠噪声干扰滤波器以及抗高频干扰性能好的线性电源模块;2)引信壳体不是金属材料,采用高分子聚合物制成,在一定程度上减少了磁场干扰。仿真和实验分析表明,TMR探测器对汽车目标的实验表明该探测器对汽车探测距离能够达到8 m。TMR探测器的输出是随着铁磁目标的磁场强度增大而增加。由于坦克的铁磁量是小汽车的数倍,可以推测该探测器至少能够实现8 m以上对坦克,装甲车等铁磁目标的预警,完全能够达到磁引信的需求并较传统磁引信显著提高了探测距离。后续将应用隧道磁电阻三轴线性传感器进行探测,在空间允许的情况下,可采用隧道磁电阻传感器阵列,全方位地探测目标信息,以提高目标识别精度。


3 电路仿真



4 汽车实验





5 结论