台站选择对芦山M7.0地震余震定位结果的影响
2018-09-10魏娅玲颜利君
魏娅玲,颜利君,唐 涛,蒋 波,管 勇
(四川省地震局,四川 成都 610041)
地震定位是地震学中最经典、最基本的问题之一,准确的定位结果对于地震活动构造、地球内部结构、震源的几何构造等地震学问题的研究有着重要意义。近年来,随着数字地震学的快速发展,人们对地震内部结构及震源破裂过程的研究越来越深入,对地震定位结果的准确度也提出了更高要求。地震学家们一直都在不断尝试、改进或提出新的方法(赵仲和,1983;朱元清,1997;孔韩东,2017)。
影响地震定位结果精度的因素有很多,如台站布局、震相到时测量误差、不同定位方法的不同算法、速度模型等等,其中速度模型影响因素是现阶段还不可能完全解决的,震相到时测量误差也具有一定的随机性。实际情况表明,定位台站选取是否合理是影响定位结果可靠性的一个十分重要的因素,也是一个可以改善的因素。台站分布主要取决于四个要素:①台站分布均匀度;②最近台站的震中距;③可记录到波形的最远台站震中距;④台站分布相对于震中的最大空隙角(最大空隙角是指震中位置到台站的连线中,两相邻台站之间的最大夹角)。本文采用广东省地震局研发的MSDP软件对四川芦山地震余震中ML≥3.0的80个余震波形事件重新拾取震相,通过选用不同台站(或不同最大空隙角)对同一地震进行多次重定位,初步讨论定位台站选择对芦山地震余震定位基本参数(包括发震时刻、震中位置和震源深度)结果的影响程度,找出芦山余震定位的最佳台站分布规则。此项工作可以提高地震定位结果的可靠性,减小研究区域余震分布的离散度,无论是从科研究角度还是日常工作都是一件有意义的基础性工作。
1 资料选取及处理方法
1.1 台站和研究数据的选取
四川芦山“4·20”M7.0主震发生后,地震应急流动监测队伍于当天就开始在震源区周围架设流动台站,至4月25日共架设了15个流动台站,这些流动台较为均匀地分布在震区及其附近50 km范围,对震区形成了较好的方位覆盖。之后,中国地震局芦山“4·20”M7.0地震科学考察小组为了查明芦山地震的发震构造及其特征、构建芦山地震的发震构造模型,采用人工地震剖面和科考台阵记录资料来揭示震源区的地壳精细结构和深浅构造关系,科学考察小组将该区域原有流动台站进行了适当调整,另外还加密增设了20个台站,总计由35个台站组成芦山科考台阵(参见图1),台站分布最大空隙角可达15°,形成迄今为止四川省内监测台站分布密度相对较高的一个局部区域。所有台站于2013年6月24日全部汇入四川省地震监测台网中心进行实时分析处理,运行状况一直良好,记录到了高信噪比的芦山震区余震序列波形数据,为准确测定芦山地震余震震源参数提供了宝贵的监测资料。
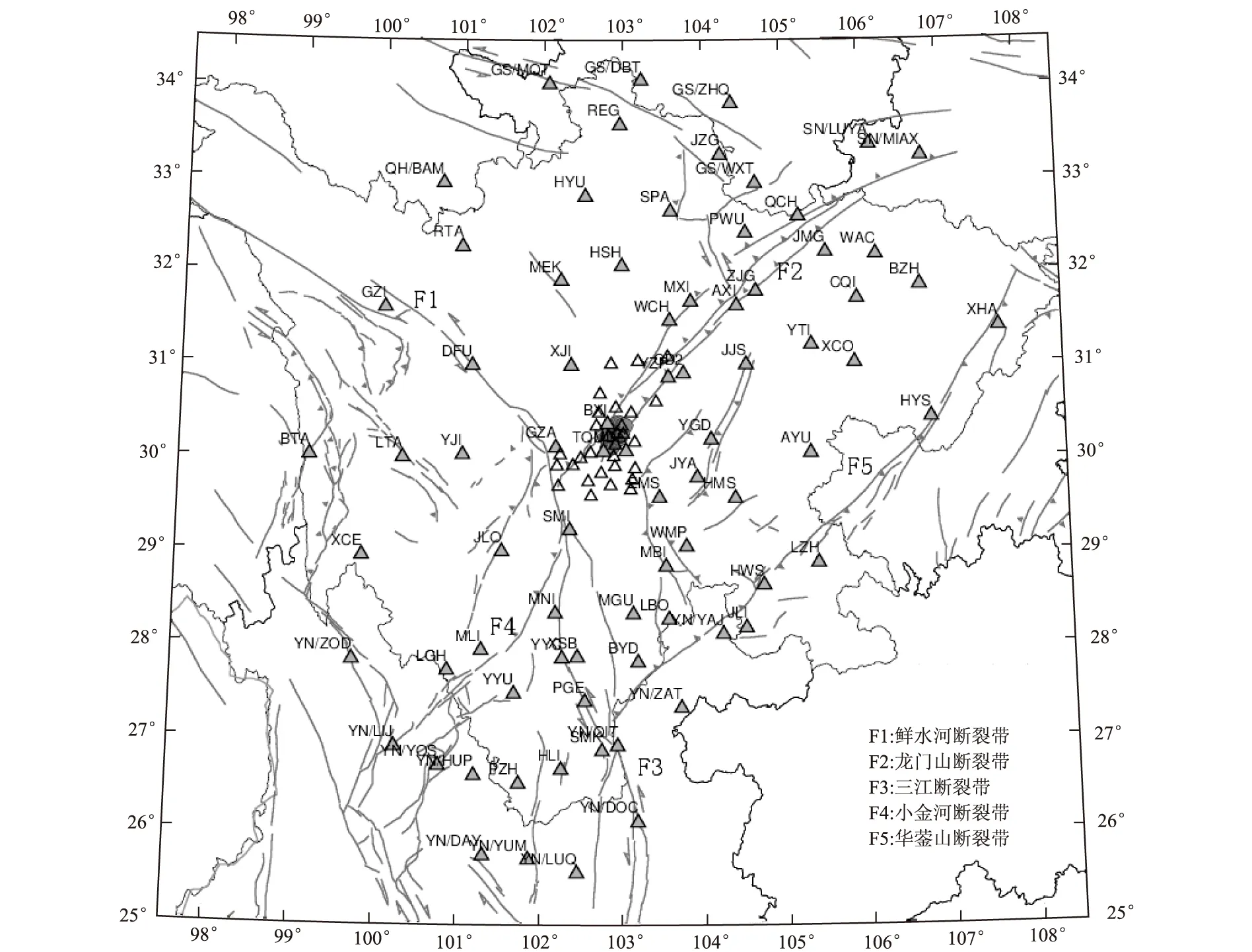
▲表示四川及邻区固定台站,△表示芦山科考台阵,●表示芦山地震余震图1 重定位的台站分布
本研究选用2013年4月26日~2014年6月24日、3.0≤ML≤6.0的86个余震数字地震波进一步仔细分析,其中,ML3.0~3.5余震76个,ML4.0~4.9余震10个。经过波形筛选,剔除芦山地震余震中波形叠加、干扰较大的余震,最终挑选出了80个波形记录清晰的余震波形事件,重新进行震相拾取。
1.2 定位速度模型的选取
本文采用广东省地震局研发的MSDP软件对四川芦山M7.0地震余震中ML≥3.0地震波形事件重新拾取震相,使用地震行业科技专项“川滇地区地震走时表编制”研发的定位软件Loc3D及川滇三维速度模型对这些地震进行重新定位。川滇三维速度模型是基于三维速度间断面和三维速度扰动变化,考虑了地球扁率、地形起伏和台站高程等因素的影响(吴建平,2009;房立华,2013),是目前四川测震台网地震定位中所采用的最主要、精准度相对较高的速度模型。
1.3 最佳震中区的规定
震中是震源位置在地表水平面上的垂直投影(可用经、纬度表示)。在实际工作中,即使采用同一定位方法和速度模型,选择不同的台站进行定位,其结果往往也不会完全相同。根据地震行业标准《地震编目规范》中规定的1类精度地震的条件,我们在本研究中规定:参加定位的台站同时满足四个条件时(定位台站四方位均匀分布、△最近台站≤5 km、△定位台站≤300 km且0°≤定位台站最大空隙角≤45°),得到的震中位置为最佳震中位置,将所有满足条件的最佳震中位置分布范围作为最佳震中区,最佳震中区内的所有震中位置均视为真实震中位置。分别计算出各次重定位震中位置与多个真实震中位置的偏差,并把其最小偏差值作为最终的重定位震中位置偏差。震中位置偏差(ΔΕ)的计算公式如下:
(1)
式中φ1、λ1分别为真实震中位置的经度、纬度,φ2、λ2分别为重新定位得到的震中位置的经度、纬度。
表1是2013年7月6日5时ML4.0余震在不同震中距范围所对应的台站数、震相数和台站分布的最大空隙角。该余震的最近台站震中距为3 km,震中距10 km范围内有3个台站,震中距20 km范围内有5个台站,能清晰识别震相的最远台震中距为550 km。从表1可知,当参加定位的远台震中距在120~300 km范围(表1中的黑体部分)时,可以得到该余震的多个最佳震中位置。

表1 不同震中距范围所对应的台站数和最大空隙角
2 台站选择对定位结果的影响性分析
2.1 定位台站距离的影响性分析
在进行近台距离影响性分析的定位过程中,我们先对80个余震的所有能够拾取到清晰震相的台站进行初次定位,然后按照由近及远的方式不断地减少震中区附近的近台(可按5~10km窗长进行减少),从而计算出各地震的多次重定位结果。图2(a)~(h)是重定位震中位置随近台距离的变化情况,从震中分布趋势可知,重定位震中位置随着近台距离的增大而逐渐偏离最佳震中区域, 比如:图2(a)中的实心五角星表示最佳震中位置,多个最佳震中分布范围组成最佳震中区域(见图中的不规则多边形区域);图2(b)中,当最近台站震中距约为10 km时,有75%的空心五角星位于最佳震中区域;图2(c)中,当最近台站震中距约为22 km时,有62%的空心五角星位于最佳震中区域;图2(d)中,当最近台站震中距约为36 km时,有30%的空心五角星位于最佳震中区域;图2(e)中,当最近台站震中距约为53 km时,有25%的空心五角星位于最佳震中区域;图2(f)中,当最近台站震中距约为65 km时,仅有20%的空心五角星位于最佳震中区域;当最近台站震中距大于80 km后(见图2(g)~(h)),虽然台站最大空隙角可以小于45°,但是所有重定位的震中位置全都偏离了最佳震中区域,震中位置分布离散,说明近台对保证地震定位的准确性是非常重要的,是关键因素。
在进行远台震中距影响性分析的定位过程中,我们先采用最近三个台站进行初次定位,然后按照由近及远的方式不断地增加震中区外围稍远的台站(可按5~10 km窗长进行增加),当定位远台站震中距增加至120 km后,台站分布的最大空隙角就会小于45°(参见表1)。重定位震中位置随远台震中距的变化情况见图2(a),从该图可以看出,实心圆结果的分布范围较空心圆结果的分布范围更加离散,虽然空心圆结果在一定程度偏离了最佳震中区,最大偏离值也仅约为2 km,且发震时刻的偏差值范围一般在0.1~1.0 s之间,说明远台震中距离的增加并不是影响定位结果的主要因素。
2.2 定位台站分布最大空隙角的影响性分析
由于影响地震定位结果精度的各台站因素之间是相辅依成的,故在进行定位台站分布最大空隙角的影响性分析时,我们同时也考虑了台站距离远、近的影响,将定位台站震中距范围划分为三种情况进行讨论(见图3(a)~(c))。定位过程中,我们先对满足震中距范围的所有台站进行初次定位,以最近台站方位角为起始点(保留最近台站),然后按照顺时针方向不断地减少台站(按5°窗长进行减少)来不断地增加最大空隙角,从而得到多个重定位结果。

不规则多边形区域表示最佳震中区,空心五角星☆表示最大空隙角小于45°的重定位震中位置,实心五角星表示最佳震中位置,实心圆●表示最大空隙角大于等于45°的重定位震中位置,空心圆○表示远台距离大于300 km且最大空隙角小于45°的重定位震中位置。图2 震中位置随定位台站震中距离远、近的变化情况
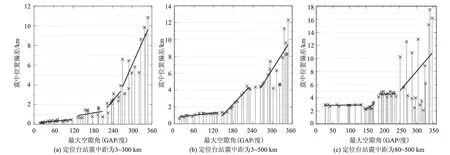
图3 震中位置偏差随台站分布最大空隙角的变化情况
重定位震中位置偏差随台站最大空隙角的变化情况见图3,总体来看,无论定位台站震中距范围如何,都会呈现出震中偏差随着最大空隙角的增大而逐渐增大的现象。由图3(a)可知:当台站震中距在3~300 km内,偏差值范围约为0~11 km;最大空隙角小于120°时,定位结果分布比较稳定,偏差均值约为0.4 km。由图3(b)可知:当台站震中距在3~500 km范围内,震中偏差值范围约为1~12.5 km,最大空隙角小于120°时,定位结果分布也比较稳定,偏差均值约为1.0 km,较图3(a)略有增加。由图3(c)可知:当台站震中距在80~500 km范围内,震中偏差值出现分段现象,最大空隙角小于120°时,偏差均值约为3 km;最大空隙角在120°~160°之间时,偏差均值约为2.5 km;最大空隙角在160°~250°之间时,偏差均值约为4.6 km;在最大空隙角大于250°后,偏差值的结果极不稳定,在2.0~18 km之间跳跃。总体来说,台站分布最大空隙角的大小对定位结果的影响很大,在台站分布不变的情况下,为了保证定位台站分布的最大空隙角足够小, 可以适当增加远台来进行定位是很有必需的。
从图4(a)~(c)中可以看出,在最大空隙角小于270°时,三种情况下的重定位震源深度分布均比较稳定,震源深度值平均约为21 km,在最大空隙角大于270°后,三种情况下的重定位震源深度分布就都变得比较离散,深度值浮动范围比较大。由图4(a)可知:当大空隙角小于270°时,深度值上、下限的浮动范围为3 km。由图4(b)可知:当大空隙角小于270°时,深度值上、下限的浮动范围为1.5 km。由图4(c)可知:当大空隙角小于270°时,深度值上、下限的浮动范围为1 km。由此说明通过适当增加远台,可以保证震源深度结果分布的稳定性。由图4(d)中可知,当最近台站震中距大于80 km后,重定位震源深度分布离散,深度值浮动范围为8~32 km,失去了稳定性,说明近台是保证震源深度稳定性的主要因素之一。

图4 震源深度随台站最大空隙角的变化情况
2.3 芦山余震定位台站的选取原则
综上所述可知,合理选择台站进行定位,可以改善地震定位结果的精度,提高产出数据的质量,对地震观测数据的科学应用及研究是很必要的。我们采用0~300 km的所有台站,对四川芦山地震余震中ML≥3.0的80个波形事件进行重新定位,这样既可以保证台站分布的最大空隙角小于45°,尽可能多地使用近台,又可以保证每个地震的定位深度值的稳定性。80个重定位结果中,有73个地震的震中位置分布在最佳震中区范围,占地震总数的90%,其他8个地震的震中偏差值都小于5 km,定位结果也是比较准确的。图5是本研究ML≥3.0余震重定位结果分布图,由该图可知,重定位结果的深度剖面图呈现出一定的特征,震源深度的优势分布范围在12~22 km之间。

图5 余震重定位结果分布
3 结论
本研究对芦山M7.0地震余震中ML≥3.0的80个波形事件重新拾取震相,并通过不断增加远台、不断减少近台、改变最大空隙角大小的方式对每个地震进行多次重定位,分析讨论台站选择对芦山地震余震定位结果的影响性,找出研究区域地震定位的最佳台站分布规则。综上所述,得出以下几点结论:(1)近台是保证定位结果准确性的关键因素。当最近台距离小于10 km、且最大空隙角小于45°时,有90﹪的定位结果分布在最佳震中区内;当最近台距离大于80 km时,定位结果分布离散、失去稳定性,准确度显著降低。(2)最大空隙角大小是影响定位结果的主要因素之一,震中位置偏差通常会随着最大空隙角的增大而逐渐增大。当最大空隙角小于120°,且最近台距离小于10 km时,定位结果分布比较稳定,震中偏差均值小于5 km;当最大空隙角大于200°,且最近台距离大于80 km时,定位结果分布极不稳定。(3)远台不是影响定位结果的主要因素,适当地增加远台可以减小最大空隙角,从而保证震中位置和震源深度分布的稳定性。(4)研究区域地震定位的最佳台站分布规则为:最近台站距离<10 km、0°≤最大空隙角≤45°且最远台站距离为300 km。
