四轮独立驱动电动汽车驱动防滑控制仿真研究
2018-09-10廖自力蔡立春刘春光
廖自力 蔡立春 刘春光
摘 要:为解决车辆在起步或加速过程中车轮容易打滑的问题,本文以单轮车辆为研究对象,在Matlab/Simulink中建立了车辆模型、轮胎模型和电机模型。设计了模糊控制器,并对建立的汽车驱动防滑控制模型进行仿真研究,得出仿真曲线。结果表明,建立的汽车模型符合实际,设计的模糊控制算法能够实时对车辆转矩进行调节,从而有效控制汽车滑移率,提高汽车驱动稳定性,其性能优于传统的PID控制器,具有较高实际应用价值。
关键词:电动汽车;滑移率;防滑控制;模糊控制;PID控制
中图分类号:U469.7 文献标识码:A 文章编号:2096-4706(2018)02-0041-03
Simulation Research on Anti-skid Control of Electric Vehicle Driven by Four
Wheel Independent Drive
LIAO Zili,CAI Lichun,LIU Chunguang
(Armorde Forces Academy of PLA Army,Beijing 100072,China)
Abstract:In order to solve the problem that the wheel slips easily during the starting or accelerating process of the vehicle.In this paper,a single wheel vehicle is taken as the research object.A vehicle model,a tire model and a motor model are established in Matlab/Simulink.The fuzzy controller is designed,and the simulation research on the model of automobile driving anti slip control is carried out,and the simulation curve is obtained.The results show that the vehicle model is consistent with the actual,the fuzzy control algorithm to design of real-time vehicle torque adjustment,so as to effectively control the vehicle slip rate,improve vehicle driving stability,its performance is better than the traditional PID controller,it has the practical application value.
Keywords:electric vehicle;slip rate; antiskid control;fuzzy control;PID control
0 引 言
汽車在起步或加速时车轮容易发生打滑,这时就需要对驱动轮上的转矩进行调节。汽车的驱动防滑控制系统(ASR)能在汽车起步或加速时通过控制驱动轮上的力矩来调节车轮的滑移率,以维持车辆行驶的稳定性[1]。ASR是车辆防抱死制动系统(ABS)的延伸,也是对ABS系统的完善和补充[2]。对ASR装置而言,控制算法是其核心。目前应用比较多的算法是逻辑门限控制[3],其他的还有PID控制、模糊控制、神经网络控制、滑模变结构控制等。本文根据车辆启动加速的特点和其对稳定性的要求,选取了模糊控制算法应用于汽车的ASR系统。该算法不依赖于车辆精确的数学模型,与传统的PID控制相比,控制精度高且稳定性好,对于车辆的驱动防滑控制具有十分理想的效果。
1 汽车ASR系统的数学模型
1.1 车辆动力学模型
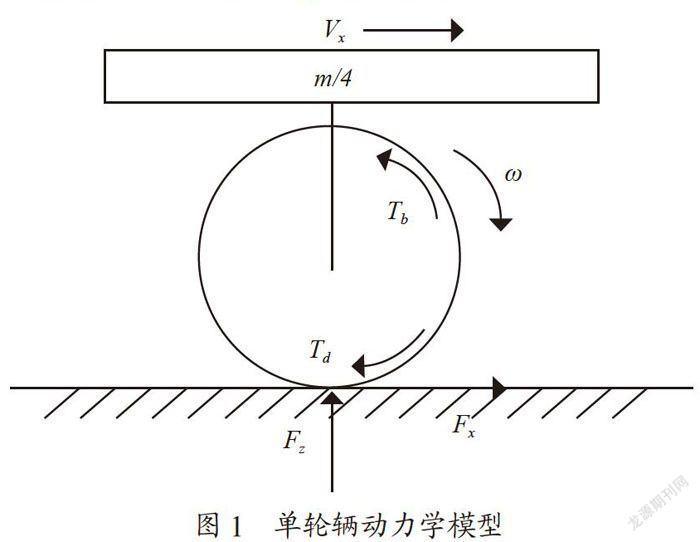
本课题讨论的电动汽车由四个完全相同的轮毂电机独立驱动,防滑控制是通过各个控制器独立控制每个车轮。在达到实验要求的情况下,合理简化车辆模型,忽略车辆行驶过程中的俯仰、侧倾、空气阻力、滚动阻力以及四轮的相互作用等因素,假设车辆载荷为常数,将车辆简化为单轮车辆模型,即由一个平移质量和一个旋转车轮组成的二自由度四分之一车辆模型[4],其结构如图1所示。
图1 单轮辆动力学模型
取车轮运动为正方向,则该模型的动力学方程为:
(1)
(2)
其中,Iw——车轮的转动惯量(kg/m2);Fx——轮胎对地面的纵向作用力(N);R——车轮半径(m);m——车身质量(kg)。
1.2 滑移率定义
滑移率是指车辆的理论速度与实际速度的差与理论速度的比值[5],是描述车轮打滑程度的物理量,滑移率大,车轮打滑越严重。其定义为:
(3)
1.3 轮胎数学模型
轮胎模型指的是轮胎的附着力与其他各种因素之间的函数关系式,其数学模型有很多,本文采用的是应用比较广泛的魔术公式轮胎模型[6],其表达式如下:
(4)
1.4 电机数学模型
本车采用的是永磁无刷直流电机。电机的转矩模型可简化成一阶动态系统模型,其表达式为:
(5)
2 模糊控制器设计
2.1 设定输入输出
本课题采用双输入—单输出模糊控制器。输入变量有两个,分别为滑移率差偏差E和滑移率偏差的变化率EC;输出变量有一个,为电机转矩变化量U。
(1)偏差E的设定。定义滑移率与最优滑移率的偏差E的论域是[-0.2,0.8],采用三角型隶属度函数,将滑移率差值E在论域上分为五档,分别为NB(-0.2,-0.2,-0.1)、NS(-0.2,-0.1,0)、ZE(-0.1,0,0.1)、PS(0,0.1,0.2)、PB(0.1,0.2,0.8,0.8)。
(2)滑移率偏差变化率EC的设定。定义滑移率偏差的变化率EC的论域为[-1,1],采用三角型隶属度函数。将滑移率差值的变化率EC在论域上分为五档,分别为NB(-1.5,-1.0,-0.5)、NS(-1.0,-0.5,0)、ZE(-0.5,0,0.5)、PS(0,0.5,1.0)、PB(0.5,1.0,1.5)。
(3)电机转矩调节量U的设定。定义U的论域为[-3,3],釆用三角型隶属函数。将U的集合取七档,分别为NL(-4,-3,-2)、NM(-3,-2,-1)、NS(-2,-1,0)、ZE(-1,0,1)、PS(0,1,2)、PM(1,2,3)、PL(2,3,4)。
2.2 確定模糊规则
为满足车辆滑移率的控制要求,保证车辆行驶的稳定性,依据相关知识和反复试验,确定的模糊控制规则如表1所示:
2.3 清晰化
本文采用的清晰化方法为工业上常用的重心法,重心法是取隶属度函数曲线与横坐标围成面积的重心,作为模糊推理的最终输出值。
2.4 与控制对象对接
确定比例因子和量化因子,把模糊控制器与对象模型进行匹配。经过计算和调试,本实验最终确定的比例因子为60,量化因子为200。
3 汽车ASR系统仿真及结果分析
3.1 建立模糊防滑控制算法的整车模型
模糊控制算法的模型如图2,其主要由电机模型、轮胎模型、车辆动力学模型、模糊控制器等组成,其量化因子和比例因子通过计算确定,通过仿真实验进行调节,从而达到最佳的防滑效果。
3.2 汽车ASR系统仿真及结果分析
(1)验证模型是否正确。在建立模型之后,首先应当验证模型是否与实际相吻合,我们选择典型路面为干沥青路面(最大附着系数0.95,最优滑移率μ=0.22)来验证模型是否正确。给定电机输入的转矩信号分别为25Nm,50Nm,100Nm,经减速机构传递给驱动轮,减速比为5,车辆初速度为0,在不加防滑控制下进行仿真,得到如图3的仿真结果。
图3 不加防滑控制下的滑移率仿真图形
仿真结果表明:1)当电机转矩较小时,车轮滑移率也较小,车轮基本不发生打滑,车速轮速大致相等;当电机转矩增大,车轮打滑越来越严重。2)同一路面,无防滑控制的情况下,在某一恒定转矩下车轮的滑移率趋于恒定值。上述实验结果与实际情况相符,从而验证了模型的正确性。
(2)验证驱动防滑控制的控制效果。给定电机输入的转矩信号都为100Nm,其他实验条件与上文相同,分别在 PID控制和模糊控制情况下进行仿真,得到如图4的仿真结果。
从图3,4可以看出,在无防滑控制的条件下,给电机施加一定转矩,车轮滑移率迅速增大,且大部分的能量通过与地面摩擦消耗,车辆最后达到的速度并不高。PID控制和模糊控制都能很好地控制车轮滑转,但模糊控制调节时间更短,滑移率控制更加精确,车辆最后到达的速度更高,因此模糊控制相比于PID控制而言能更好地发挥车辆的驱动性能,效果更佳理想。
4 结 论
本文针对车辆驱动防滑控制系统,利用MATLAB/Simulink建立单轮车辆模型,设计了模糊控制器,通过仿真实验验证其防滑控制效果,并与传统PID控制器运行效果进行对比,验证了所设计的模糊控制器的有效性[7]。对比结果表明:模糊控制算法均能快速地对车辆打滑进行闭环控制,精度较高,超调量小,可以有效控制车轮滑移率,保证车辆行驶的稳定性,较PID控制器而言,具有更加理想的控制效果,具有一定的实际应用价值。
参考文献:
[1] Sahin,Murat,Unlüsoy,Y. Samim. Design and simulation of an abs for an integrated active safety system for road vehicles [J]. International Journal of Vehicle Design,2010,52(1-4):64-81.
[2] 黄安华.现代汽车的主动安全技术 [J].商用汽车,2002(4):55-56.
[3] 赵虎.一种客车ASR系统的应用仿真及试验研究 [D].合肥:合肥工业大学,2011.
[4] 赵亚超.基于滑移率估计的电动轮车驱动防滑控制策略的研究 [D].武汉:武汉理工大学,2014.
[5] BEVLY M D,GERDES C J,WILSON C. The use of gps based velocity measurements for measurement of sideslip and wheel slip [J]. Vehicle System Dynamics,2002,38(2):127-147.
[6] 张成杰.基于后轮独立驱动的电动汽车驱动防滑与扭矩分配协调控制研究 [D].南京:东南大学,2016.
[7] 李萍,陈学文,张衍成.基于ABS的车辆动力学建模与仿真分析 [J].辽宁工业大学学报(自然科学版),2014,34(1):43-46+52.