环卫车高压清洗系统的设计优化
2018-09-10邢广佩
邢广佩


摘要:结合环卫车高压清洗系统的实际应用情况,对环卫车高压水路系统的结构与控制逻辑关系匹配进行了优化,解决了由于控制逻辑关系造成的系统内压力震荡问题,使得各系统动作换向时,管路内液体流动平稳,压力损失小,提高了高压水泵、安全阀及卸荷阀的使用寿命。
关键词:环卫车 高压水路 控制逻辑 回水管路 压力震荡
中图分类号:U469.6+91.03 文献标识码:A 文章编号:1004-0226(2018)03-0090-05
1 前言
随着国家经济的不断发展,越来越多的环卫车走进人们的生活。为了提高车辆的清洁能力,避免二次扬尘,部分环卫车上加装了高压清洗系统,如洗扫车、高压清洗车、路面养护车、地下管网疏通车等。高压清洗系统的应用使城市环卫清洁更加高效,但大流量、高压力的水在作业过程中对系统可靠性要求更高。系统设计的合理性不仅会影响产品的使用性能,同时有坷能由于系统结构、控制設计的匹配不合理,导致水泵泵体、水路中的阀、喷嘴管路等损坏。因此,在高压水路设计应用过程中,除了注意流量和压力、管路之间的匹配问题外,还应考虑到控制逻辑关系与系统之间的匹配。
2 现有高压清洗系统的工作原理
高压清洗系统主要是利用高压水流的动能,以高压力、低流量的方式清洗路面。具有去污能力强,能清除路面陈旧污渍,工作效率高,较普通洒水车耗水量少的优点。高压清洗系统原理如图1所示,由水箱、高压水泵、水过滤器、自动卸荷阀、安全阀、高压球阀、分水管、高压管路、喷嘴、高压喷枪等组成。以水为工作介质,由柱塞式高压水泵经水过滤器将水吸入泵体,依靠柱塞在缸体中往复运动,将普通的水转化为高压水,经自动卸荷阀进入分水管,然后通过气动控制高压球阀的开关控制高压水流入各作业单元。最后,高压喷嘴把高压水转变为低压高流速的射流。当射流的冲击力大于污垢与物体表面的附着力时,就会将污垢剥离,冲走,从而起到高压清洗的作用。
高压清洗系统的设计,首先要考虑高压清洗系统的应用场所、使用工况、对接水源等因素。该套系统在环卫车上应用十分成熟,广泛应用于高压清洗、洗扫、路面养护、清洗疏通等车辆,工作原理相对成熟规范,本文不再赘述,仅以洗扫车为例,进行系统结构分析。
洗扫车的高压清洗系统主要用于城市道路高压清洗、喷雾降尘、手持喷枪定点冲洗、箱体内部自洁等,车辆一般匹配9m3清水,工作压力≥7MPa,持续作业时间60?90min。洗扫车主要零部件总成为喷嘴、管路、限压阀及水泵等,其工作原理如图1所示。
由图1可见,水箱内的水经过过滤器进入高压水泵,产生的高压水通过自动卸荷阀、溢流阀进入总分水管,然后通过气动控制球阀的执行器控制高压球阀的开关,以控制高压水流入各个作业单元。为避免水泵带负载启动,水泵卸荷阀连接的球阀处于常开状态,即在不工作时,系统内的高压水通过水泵卸荷阀直接流回水箱;其余各分水器工作单元连接的高压球阀处于常闭状态,只有当某个工作单元需要工作时,与之对应的气缸电磁阀得电才能使得高压球阀打开。当各路工作单元任意一路动作时,水泵卸荷阀同时关闭,确保高压水流到各相应工作装置。整套系统的控制方式是采用电磁阀控制气缸动作,再由气缸开关各管路球阀实现水路系统的自动控制。详细情况可见电气原理图2,高压清洗系统气阀组电气控制逻辑关系表1。
由高压水气路原理图3解析得知,气动系统气源取自底盘车制动系统的储气筒。取气口后设有一个手动气阀,它是气动系统的气源总开关,正常工作时,该阀总是开启的。维修气动系统前,应先关闭该阀,维修后打开该阀。在该阀附近还装有一个同型号的手动气阀,该阀出口与高压水路吹气管相连,用于冬季高压水路排水。整套气动系统总共分为6路,分别通过电磁换向阀控制气缸的伸缩,实现控制水路球阀的启闭。其中左侧第1路是控制水泵卸荷阀,其余5路是通往各动作单元的启闭,依次为自洁球阀开关、喷雾球阀开关、中喷杆球阀开关、右喷杆球阀开关及左喷杆球阀开关。
由表1以及图2解析得知,当操作人员选择左清洗作业时,通过控制器输出控制左喷杆喷水,电磁阀YV19、吸嘴喷杆喷水电磁阀YV21得电,通过外部线束控制高压水卸荷阀YV26同时得电,电磁阀YV19、YV21所控制气缸推出,YV26所控制气缸收回,各个气缸动作同步完成;当选择右清洗作业时,通过控制器输出控制右喷杆喷水电磁阀YV20、吸嘴喷杆喷水电磁阀YV21,通过外部线束控制高压水卸荷阀YV26同时得电,电磁阀YV20、YV21所控制气缸推出,YV26所控制气缸收回,各个气缸动作同步完成;当选择全清洗作业时,通过控制器输出控制左喷杆喷水,电磁阀YV19、右喷杆喷水电磁阀YV20、吸嘴喷杆喷水电磁阀YV21同时得电,通过外部外部线束控制高压水卸荷阀YV26同时得电,电磁阀YV19、YV20、YV21所控制气缸推出,YV26所控制气缸收回,各个气缸动作同步完成;当选择自洁作业时,自洁电磁阀YV25与高压水卸荷阀YV26同时得电,电磁阀YV25所控制气缸推出,YV26所控制气缸收回,两气缸动作同步完成;当选择喷雾作业时,喷雾电磁阀YV24与高压水卸荷阀YV26同时得电,电磁阀YV24所控制气缸推出,YV26所控制气缸收回,两个气缸动作同步完成;当从任意一种作业模式切换到“作业停止”时,YV26与相应的动作电磁阀同时断电,YV19、YV20、YV2丨所控制气缸收回,YV26所控气缸推出,各个气缸动作同步完成。
3 常见高压水路及问题分析
3.1 现有高压水路存在的问题
目前市场上常见的高压水路供水系统基本动作平稳,无过大异常,只是在动作单元启动时发现测压表针有轻微震荡,但经过长时间运行,使用超过1年后,发现水泵泵头损坏、安全阀、自动卸荷阀的故障率偏高。水泵陶瓷泵头出现开裂、安全阀、卸荷阀出现卡滞现象,如图4所示。
3.2 故障原因分析
在检查水泵进水过滤器完好性后,排除了因水质问题造成的损坏,经过对高压水路结构和控制逻辑关系分析,并跟踪车辆实际使用工况,发现引起此故障的原因主要有如下2个方面:
一是当高压水路中的各电磁阀YV19、YV20、YV21所控制气缸推出动作时,水泵卸荷阀YV26同时动作,当两路水路同时动作时,由于卸荷球阀YV26关闭时,VY19、VY20、VY21开启存在延后现象,在卸荷阀关闭工作球阀开启的过程中,会出现短暂的管路通径封闭、或半封闭状态,形成相对封闭的空腔,由水泵泵出的高压水持续向管路内输送,在封闭腔内管路水压瞬间升高,形成压力震荡。尽管这种压力震荡现象持续时间较短,肉眼观察不明显,但采用电子压力传感器测压反馈到压力曲线图中,可以看出各水路动作换向均会引起明显的压力震荡。高压振荡的反作用力通过液体高压水反馈到水泵泵头上,造成水泵泵头处于长时间的震动中,容易引起泵头疲劳破坏。
经现场测试水泵出口压力,印证了该分析,详见水泵工作压力震荡曲线图5。由图5可见,每次水路动作转换会存在23的压力震荡:高压清洗系统水路压力提升是结合使用工况和输入转速设计的,为避免发动机负载启动,0?t1时间内,发动机在启动到转速达到怠速状态,柱塞水泵处于卸荷状态,系统压力为0;t1~t2时间内进入作业启动模式后,发动机保持怠速,经过5s压力缓慢提升期,系统压力升到2M Pa;t2~t3时间内进入压力提升期,发动机怠速状态,系统压力保持2MPa,稳定5s;t3~t4时间为系统压力上升期,经过10s时长,发动机转速提升到1550r/min,持续10s,系统压力最高达8MPa;t4~t5时间段为高压稳压期,发动机转速稳定在1550r/min,系统压力经过1?2s压力震荡期,最后稳定在安全阀设定压力7MPa。
图5中,0?t1为怠速(800r/min),系统卸荷状态;t1~t2为怠速,作业启动过程中状态,持续5s,系统压力升到2MPa;t2~t3为怠速,作业启动过程完转速开始提高前状态,持续5s;t3~t4为副发动机转速提高到作业转速(1550r/min)状态,持续10s;系统压力最高达8MPa;t4~t5为系统调压阀调压过程状态,压力震荡持续1?2s,最后调定在7MPa;t5?t6为系统压力稳定正常作业状态;t6~t7为作业开始,气缸推动清洗球阀打开,同时气缸推动水泵卸荷球阀关闭,压力震荡持续1?2s,最后调定在7MPa;t8~t9为作业停止,气缸推动清洗球阀关闭,同时气缸推动水泵卸荷球阀打开,压力震荡持续1?2秒,最后调定在7MPa。
可见该套系统的控制逻辑关系存在设计缺陷。
二是由于环卫类的高压清洗车每天作业完毕后,车辆操作人员在手持点喷枪进行清洗作业时,水泵卸荷阀YV26处于关闭状态,后喷雾电磁阀YV24处于开启状态,点喷枪的开关通过手动控制,当点喷枪处于开启状态时,高压水流持续稳定输送到点喷枪外,压力稳定,安全阀处于设定工作压力;当点喷枪瞬间关闭时,由于高压水泵仍处于工作状态,依然持续向点喷枪管路供水,引起管路内的压力瞬间升高,当压力超过安全阀设定值时,安全阀处于溢流状态,极限状态下可能引起自动卸荷阀的快速卸荷,在此工作过程中水泵到点喷枪之间水压处于震动状态。该震荡经过高压水反馈到水泵泵头,从而影响水泵的寿命,同时大大降低了安全阀和自动卸荷阀的使用寿命。
当车辆操作人员手持点喷枪作业时,如果手持电喷枪处于关闭状态,则从水泵出口到分水器、管路、喷枪内腔,整体形成封闭腔,腔体内充满高压水,但高压水泵仍处于额定工作状态,即高压水泵持续向封闭腔内注水,由于腔体内容积不变,不断増多的高压水必然引起封闭腔内的水压升高,当封闭腔内的水压高于设定的安全阀压力时,高压水推动安全阀阀芯,阀体溢流卸荷,在极限状态下,瞬间压力骤升会将卸荷阀阀芯顶开,达到快速卸荷。由于一般在高压清洗系统中,手持点喷枪位于水泵出水口远端,管路内的超压溢流如果通过安全阀溢流的话,卸荷阀动作会有延时,可能存在卸荷不及时的问题。下面通过高压水泵的排量公式进行分析:
式中,Q为泵体在单位时间内流量,q为每转泵体的排量,n为泵的输入转速,t为工作时间。由于柱塞泵排量q为一个定值,而单位工作时长t=60s,属于常量,由此可见高压柱塞水泵在每分钟排量Q與水泵输入转速n成线性关系。
输入转速n为1000 r/min,水栗的排量为98 L/min,点喷枪在作业时,高压水流从喷枪喷嘴流出,喷嘴流量公式如下:
式中,Qp为体积流量,m3/S;Cd为流量系数,0计算可得,Qp=31.5L。对比水泵排量Q泵与水枪流量Qp可见,Q泵>Qp,即当手持点喷枪作业时,水泵供水量远大于喷枪需求量,造成大量高压水流浪费,系统压力高压安全阀压力,近30%左右的高压水通过溢流阀回流到水箱,由于手持喷枪距离水泵较远,卸荷响应相对延后,容易引起系统内压力震荡。
4 结构改进优化
4.1 控制逻辑关系改进
通过故障分析可知,现有高压水路系统开始工作或停止工作时,高压水卸荷阀YV26跟电磁阀YV19、YV20、YV21同时得电,即YV19、YV20、YV21所控制气缸伸缩与YV26所控气缸伸缩是同时动作。由电磁阀得电到气缸的响应动作时间大约间隔约0.2s,在这短暂的时间内,水泵出水口到管路、分水管会形成短暂的封闭腔。由于水泵持续供水,造成腔体内的液体不断增加,从而引起管路内水压升高,当压力超过安全阀设定压力后,安全阀卸荷,腔体内的压力下降,安全阀关闭;继而腔体内压力上升,安全阀打开,如此反复2?3个回合,使得整个管路达到内部平衡,压力稳定。
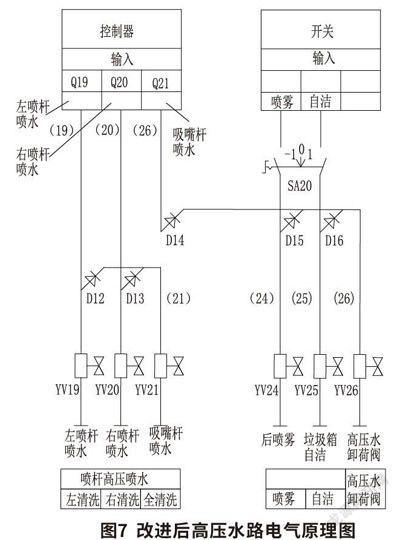
因此要想解决在高压水路开始工作或停止工作时的压力震荡问题,最核心的是要将这个动作过程中的封闭腔打破,即在各动作单元开闭球阀时,需与卸荷阀开关有一定的时间重叠。针对上述控制逻辑关系存在的问题,对其进行优化设计,当各水路单元动作时,在水泵卸荷阀动作时增加一个延时保护,优化后的高压水电气原理图如图7所示。
图7控制原理图解析:左喷杆喷水电磁阀YV19、右喷喷杆喷水电磁阀YV20、吸嘴喷杆喷水电磁阀YV21在开启“作业启动”后三个电磁阀YV19、YV20、YV21得电,相应高压球阀打开;高压水卸荷阀YV26延时2s后得电,此时高压卸荷球阀关闭。两个气缸动作延时相差2s,YV19、YV20、YV21所控制气缸推出,YV26所控气缸收回。“作业停止”时YV26电磁阀先得电,高压卸荷球阀打幵,YV19、YV20、YV21延时2s得电,相应高压球阀关闭,三路电磁阀断电,YV19、YV20、YV21所控制气缸收回,YV26所控气缸推出。
4.2 水泵多余流量疏导
通过故障原因分析可见,针对操作人员手持点喷枪作业工况,引起系统内压力震荡的主要原因是,水泵排量大于喷枪需求水流量,多余的高压水需要通过安全阀卸荷达到使用需求,并且手持点喷枪距离安全阀位置较远,安全阀卸荷响应延迟,造成系统内部压力震荡。为解决该压力震荡,需要解决水泵多余流量疏导的问题。因此针对高压水路结构进行改进,在手动点喷枪水路接口处增加一个固定的回流管路,确保在远处作业端直接卸荷,管路长度短,响应快,相比泵端而言,不易对泵头冲击,元件寿命得到相应提高。改进方案如图8所示。
5 结语
通过结构设计、控制逻辑关系优化,利用气动球阀启闭的动作延时、增加手持喷枪回流管结构,使得整套高压水路系统的换向动作平稳,降低了由于高压水震荡引起的安全阀、自动卸荷阀、高压水泵泵头的疲劳破坏,提高了高压水路系统的使用可靠性,大大延长了水泵及相关附件的使用寿命,经济效益可观。
参考文献
[1]刘洋.洗扫车高压水路系统的设计分析[J].专用汽车,2010(2):50-52.
[2]张晓东,策志国.郝鹏飞等.扁平扇形喷嘴设计及实验研究[J].机械设计与研究,2008(1):89-92.
