无传感器测深技术研究
2018-09-10张勃武利生张保军邢东东
张勃 武利生 张保军 邢东东
摘要:针对现有的悬杆测深技术存在水面信号获取准确性差,水底信号触发装置机械结构复杂或受测流环境干扰明显等问题,对通过模拟量电压识别水面信号和通过电机输出扭矩的变化得到水底信号的无传感器测深技术进行了研究,设计了基于Arduino平台的根据空气和水中电阻率不同获取水面信号的方案。利用ANSYS/LS-DYNA分析了碰撞过程并得出碰撞过程中悬杆加速度变化趋势和碰撞瞬间电机输出扭矩变化趋势,通过PLC监测伺服单元反馈模拟量变化值准确得到水底信号。实践证明,该技术能准确测深,已用于黄委中游水文水资源局各水文站的缆道吊箱测流系统。
关键词:Arduino平台;中值滤波;电机输出扭矩;水面信号;水底信号;悬杆测深
中图分类号:P332.3;TH764
文献标志码:A
doi: 10.3969/j.issn.1000-1379.2018.04.004
1 引言
河水深度是测算过流断面流量的关键数据,准确测验河水深度对于提高流量测验精度意义重大。测深悬杆是河道水深测量采用的一种设备,适用于河道宽浅的黄河上中游,通过得到的水面坐标和水底坐标计算得出水深。水面信号的获取方法较多,最常用的方法是将悬杆与固定在悬杆托盘的导线作为电流回路,导线端部裸露,当悬杆浸入水中时,利用河水具有一定的导电性将悬杆与导线导通获取水面信号。然而,当河水导电性较差时导线与悬杆导通不稳定,在水花较为明显时可能产生错误的水面信号。现有的水面信号获取技术是根据流速仪两极接线柱在空气和水中电阻的不同来获取水面信号的,在河水水温、含沙量变化较大时,无法稳定地获取水面信号。悬杆测深过程中除了需要获得水面信号外,还需要另外一个极为重要的信号——水底信号。目前水底信号采集尚无统一标准,其中性能较为优越的有失重组合自动开关KH-99和机械式失重开关,二者均存在信号采集稳定性差、机械结构复杂等问题。现有的水底信号获取技术都需要增加额外的传感器,电路繁杂,可靠性差,环境适应性差。为解决上述问题,对通过流速仪接线柱间电压识别水面信号和电机输出扭矩变化得到水底信号的无传感器测深技术进行了研究。
2 悬杆测深原理
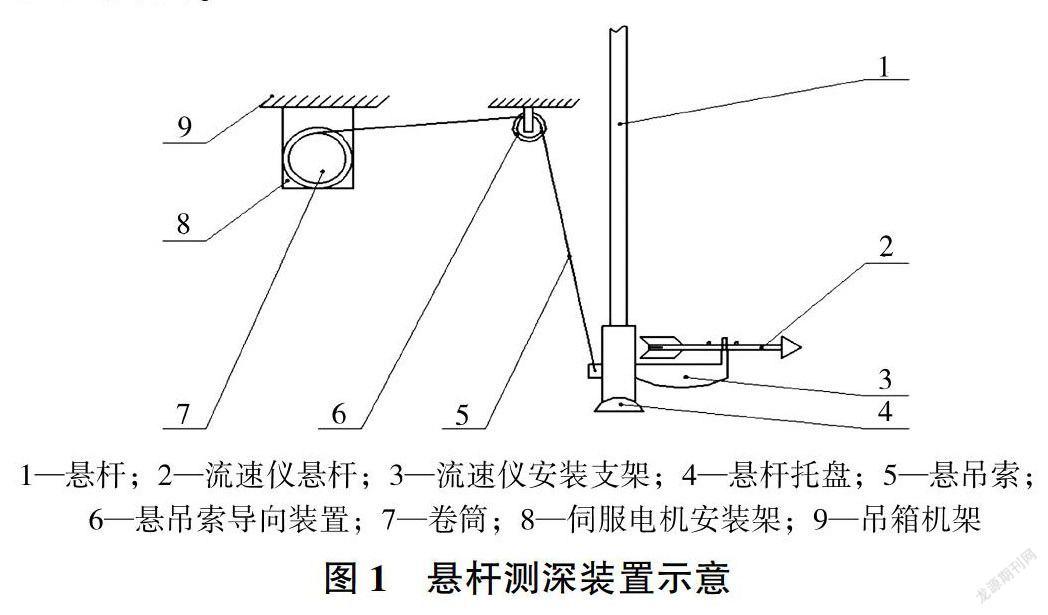
悬杆测深装置如图1所示,测深启动瞬间,悬杆加速下降,此时悬吊索拉力小于悬杆重力:加速阶段结束后,悬杆开始匀速下降,此时悬吊索拉力等于悬杆重力:悬杆碰撞到河底立即减速至停止,悬吊索所受拉力发生突变。
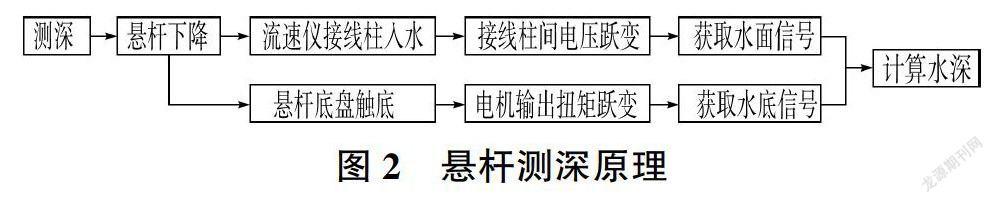
悬杆测深原理如图2所示,开始测深后,流速仪随着悬杆向下运动,在流速仪两极接线柱入水的瞬间获得水面信号:悬杆继续运动直至悬杆托盘触底,悬杆托盘接触水底瞬间产生水底信号,计算得出水深。
3 水面信号的获取
3.1 水面信号硬件设计
首先通过Arduino mega2560单片机模拟量数据采集口对流速仪进行采样,它所使用的mega2560核心处理芯片拥有16路模拟量输入,其分辨率高达10位,即可读取210=1024个状态,输入电压范围为0~5V,最小可以监测到4.8mV,完全满足实际测验需要。将采集到的模拟量电压信号通过Arduino程序处理后得到水面信号,可将信号经电平转换后提供给缆道自动测流系统。
根据实际测流过程中流速仪两极接线柱之间电阻变化范围设计出模拟量采样电路,流速仪在空气中与水中的等效电路如图3所示,其中:Liu+、Liu-分别连接流速仪两极接线柱,S为流速仪信号发送开关(入水闭合),R-liu为流速仪在空气中导通时两极接线柱之间的电阻,R-water为流速仪在水中断开时两极接线柱之间的电阻,AO为电压模拟量采集口,R52、R53为电阻,C53为电容,VCC5为电源,GND为地线。
3.2 水面信号处理
根据流速仪在空气中与水中是否导通可分为4种基本状态:空气中未导通、空气中导通、水中未导通、水中导通。当流速仪处于不同状态时,其两极接线柱之间的电阻值不同,因而通过模拟量采集口的电压值也不相同,从这些电压值中可甄别出水面信号。
要甄别出水面信号,首先需要获得流速仪两极接线柱之间在4种基本状态下的电压值分布规律。流速仪在空气中未导通时模拟量采集口的电压记为Uad,,导通时模拟量口采集的电压记为Uad;流速仪在水中未导通时模拟量口采集的电压记为Uad,导通时模拟量口采集的电压记为Uad。
利用示波器测量LS25-3A型流速仪在空气和水中的流速信号变化。分析發现在同一测流环境中存在以下特点:①在空气中未导通时的电压值Uad和导通时的电压值Uat差别较大,且Uad远大于Uat;②流速仪在水中未导通时电压值Uwd始终大于导通时的电压值Uwl,其差值大小与测流环境有关;③流速仪在空气中未导通与导通时的电压值Uad、Uat分别大于在水中未导通与导通时的电压值Uwd、Uwt,最后得出其电压值关系如图4所示。
3.3 结果对比分析
由图4可知,在悬杆测深过程中由水面信号变化产生的电压跃变有4种情况:①Uad跳变到Uwd,流速仪接线柱在从空气进入水中的过程中接线柱一直没有导通;②Uad跳变到Uwt,流速仪接线柱从空气进入水中的瞬间接线柱导通;③Uat跳变到Uwd,流速仪在进入水中之前的瞬间接线柱导通,在进入水中的瞬间接线柱未导通;④Uat跳变到Uwt,流速仪在从空气进入水中的过程中接线柱一直导通。
流速仪在水中导通与未导通的电压值均不是固定不变的,它随着测流河段含沙量、水温等的变化而变化。根据流速测验中得出的电压变化规律,同时为了消除噪声对水面信号的干扰,首先对采集到的电压值进行中值滤波处理。中值滤波方法是将窗口长度内的离散值按升序或降序排列,用中值代替中心点位置处的值。设采集一个长度为奇数的窗口内电压值依次为Ux(i-J),…,Uxj_,…,Ux(i+j),其中Uxj为中心位置电压值,将此序列按升序排列后用其中间位置值代替Uxi作为中值滤波输出值:
ULi=Media[Ux(i-j),Uxi,Ux(i+j)]
(1)
根据流速仪能够测验的最大流速,计算出其最大信号产生频率为5Hz,设定定时器采样频率为10Hz,中值滤波窗口长度L=9,因此首先至少需要预采样9个电压值作为中值滤波初始值,而实际流速信号采集过程中需要进行预采样,待流速仪桨叶稳定旋转后再正常采集接线柱之间的电压值,最后得到中值滤波后的电压序列:UL1,UL2,…,UL(i-1),ULi,UL(i+1)。根据流速信号采集过程中电压的变化规律可知,在产生水面信号的瞬间,其电压值将发生跃变,设水面信号识别算法为式中ε1、ε2为水面信号分辨率;δ为水面信号电压波动允许值:ε1、ε2、δ的值分别小于1.3、0.8和0.3时即可准确获取水面信号。
安装在悬杆底部的流速仪在测深开始后向下运动,mega2560单片机模拟量采集口对流速仪两极接线柱之间的电压值采样并进行滤波处理,判断处理后的信号是否满足式(2)或式(3)。若满足,则采集的信号就是水面信号,否则继续判断。
4 水底信号的获取
4.1 悬杆碰撞模型的建立
悬杆测深除了水面信号,还需要水底信号,即悬杆下降至底盘接触到河床时产生的信号。悬杆碰撞河床的过程较为复杂,而Hertz弹性接触理论的应用前提是接触区变形小、接触面近似为椭圆形、接触物体可被看作弹性半空间且只作用有垂直于接触面分布的压力。因此,悬杆碰撞河床土壤模型的实用性不强,分析准确性较低。本文在土壤切削和碰撞模型基础上设计了悬杆土壤碰撞模型,并利用ANSYS/LS -DYNA分析碰撞过程中悬杆受力变化情况,以此反推电机输出扭矩的变化规律,再通过监测电机扭矩变化得出水底信号。
在建立模型之前,需要设置单元属性和材料类型,单元类型选择Solid164实体单元,悬杆材料选择各向同性的线弹性材料,密度为7.86 g/cm3,泊松比为0.28,弹性模量为206 GPa。土壤材料参数较为复杂,且无法在LS-DYNA环境中直接设定,需要在K文件中修改相应参数,河床土壤材料参数见表1。
在LS-DYNA环境中建立模型,悬杆外径50mm,壁厚3mm,长度8000mm,土壤模型取边长为1000mm的立方体,悬杆与河床模型均采用智能网格划分。悬杆与河床的接触为Surface to SurfaCe和Eroding(侵蚀接触类型),定义河床、悬杆分别为ContactComponent or Part no.和Target Component or Part no.。选择垂直于接触面的其他4个面为非反射边界面,悬杆速度约为0.3 m/s。利用LS-PREPOST后处理器中的History得出碰撞过程中悬杆整体在Z方向的运动速度与加速度曲线,可知悬杆在碰撞河床过程中一直在做加速度减小的减速运动,直到速度为零。
4.2 电机扭矩计算
悬吊索收放装置主要由电机、减速机及卷筒组成,电机通过减速机带动卷筒沿顺时针或者逆时针旋转从而实现悬吊索的收放。控制悬杆升降的旋转型伺服电机型号为SGM7J-04A7C6E,其功率为400 W,额定输出扭矩为T。= 1.27 N·m。减速机减速比为i=80,传递效率η= 0.9,卷筒半径R=0.07 m。因此,卷筒额定输出扭矩为
Tj=Teiη
(4)
假设在任意时刻悬杆保持受力平衡,则有
N+F=G
(5)式中:N为河床对悬杆的反作用力;G为悬杆的重力;F为悬吊索拉力。
在利用ANSYS/LS -DYNA进行仿真分析时,假设悬吊索不存在,因此其加速度a由河床对悬杆的反作用力N和悬杆重力G的合力提供,河床对悬杆的反作用力N大小等于悬吊索拉力F,方向相反:
ma =N+G
N=-F
(6)式中:m为悬吊索质量。
選取加速度曲线中的部分点计算电机理论输出扭矩,见表2。
4.3 验证
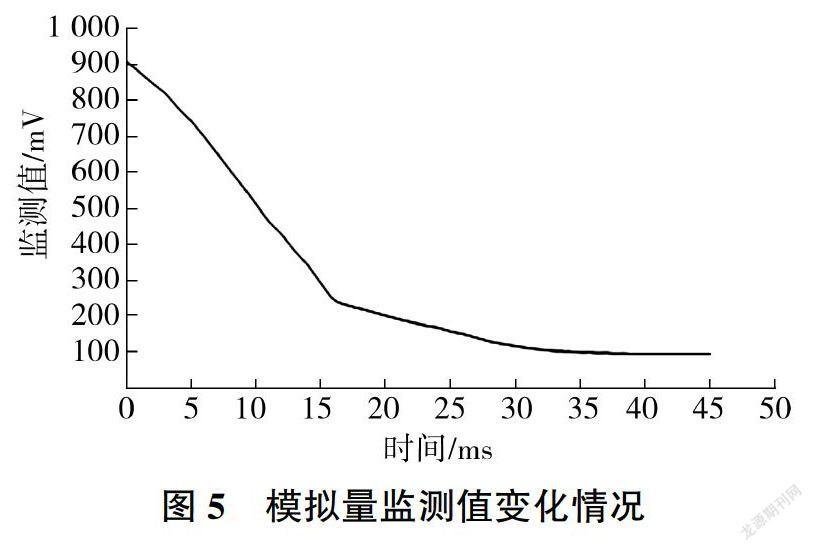
伺服单元型号为SGD7S-2R8A,悬杆测深调试阶段通过伺服单元的模拟量监测输出口监测的悬杆与河床碰撞过程的模拟量变化见图5。
在图5中描点得到表2中电机理论输出扭矩对应的模拟量监测值,并与伺服单元实际输出模拟量监测值对比,可以发现二者变化趋势基本相同。
4.4 实现
通过PLC(可编程逻辑控制器)模拟量输人口监测伺服单元实际输出模拟量监测值,测深开始后悬杆会在重力作用下下降,直至悬杆底盘碰触河床。若PLC模拟量输人口监测到伺服单元实际输出模拟量产生跃变,则表明此时悬杆底盘碰触到了河床,该跃变监测值即为水底信号。
5 结语
无传感器测深技术利用现有设施,无需另外安装传感器,根据模拟量电压识别水面信号和电机输出扭矩变化得到水底信号,有效消除了河水导电性、水温、含沙量变化较大时对获取水面信号的干扰,解决了有传感器测深技术电路繁杂、可靠性差、环境适应性差的问题,实现了在不同水文条件下稳定、准确测深,可为相关单位提供准确的水文数据资料。目前,该技术已应用于黄委中游水文水资源局各水文站的缆道吊箱自动测流系统。
