绷缝机送布机构研究及三维建模
2018-09-10王志李卫超
王志 李卫超


摘 要:绷缝机的传动机构多采用四杆机构进行运动关联。本文主要对现有机构零部件按照相互配合关系进行三维模型装配,保障机构传动的正确;并通过Excel表的相关运算功能,对现有机构进行参数化处理,以确定所需点的运动轨迹。
关键词:模块;参数化;采样;Excel优化
中图分类号:TS941.5 文献标识码:A 文章编号:1003-5168(2018)08-0049-04
Research and 3D Modeling of the Distribution
Mechanism of the Sewing Machine
WANG Zhi LI Weichao
(Jack Sewing Machine Co., Ltd.,Taizhou Zhejiang 318000)
Abstract: The transmission mechanism of the sewing machine adopts four bar mechanism to carry out motion correlation. In this paper, the main parts of the existing mechanism were assembled in accordance with the relationship of each other to ensure the correct transmission of the mechanism, and the existing mechanism was parameterized to determine the desired trajectory through the relevant operational functions of the Excel table.
Keywords: modules;parameterization;sampling;Excel optimization
1 數据采样原理
绷缝机运动机构多采用四杆机构进行机构的连接与传动,电机作为驱动源带动主轴转动,定义电机每次采样所转过的相同角度,在Excel中进行公式编辑,求得驱动源的转动角度与所需点坐标点关系。这种方法可称之为机构参数化处理,采样完成后,对数据进行数据优化处理产生最优解,通过仿真软件验算,确保数据的准确性,这可以减少仿真软件中间的烦琐运算,提高产品开发效率[1-5]。
当绷缝机机构驱动源转向一定时,机械机构的运动是唯一确定的。在唯一运动中,对模型选取基本点,然后对需要点的坐标进行函数化表达,通过Excel表的运算作用自动提取出所需点的坐标变化,通过Excel表的函数功能使机构的运动过程函数化。这样,就完成了机构的数学建模环节,后期可以对基本参数进行优化,合理更改初始数据大小、各四杆机构曲柄的初始相位角及连架杆相对位置的大小,从而求得不同的运动轨迹,最终得到优化后期望的结果。这样,就相当于将机构的初始参数进行调整,Excel表格自动进行运算,运算速度快,省去人为烦琐的运算,结果一目了然。然后相关技术人员可以通过轻松地更改一些相关初始数据来生成合理需要的运动轨迹,优化初始参数,得到理想的运动轨迹,缩短产品的开发过程。利用上述方法可以根据绷缝机的工作原理及外部需求探索合理高效的运动轨迹,提高缝纫的适应性及整机的缝纫性能,达到高效研发、快速开发新产品的目的。绷缝机送布的运动轨迹对针距的大小有较大影响,现在对绷缝机的送布机构进行设计与优化。
2 绷缝机送布机构建模及原理
2.1 送布机构简介
绷缝机送布机构包括抬牙机构与送布机构两部分,其中,控制牙齿上下运动量的称之为抬牙机构,控制牙齿前后运动的称之为送布机构,具体反映为针距。当前,绷缝机的送料轨迹是这两部分运动合成的运动,最终形成类似椭圆形的轨迹。小方头绷缝机抬牙机构由主轴偏心滑块和抬牙曲柄滑块两部分组成。抬牙机构如图1所示。
针距部分由两个四杆机构组合而成,图2为针距调节机构。在优化该结构的过程中,通过改变其中一根杆的初始角度来改变送布轴摆动角度,从而改变针距大小。为了增大绷缝机的送料行程,提高绷缝机的缝纫效果,首先要对原有针距机构零件进行SolidWorks三维建模,提取现有送布机构相关初始数据,并通过Excel表格运算得到运动轨迹。然后,设计人员对表格数据进行离散处理生成机构运动轨迹,合理改变技术参数,得到目标运动轨迹。
2.2 四杆机构分析
图3为针距凸轮机构。从图3可以看出,针距机构由两个四连杆机构组成,分别为AB、BC、CF、FA,组成曲柄四杆机构,FA为连架杆,AB为曲柄,另一个四杆机构为FC、CD、DE、EF。现在以针距机构为例,建立针距调节机构的数学模型,并利用Excel表格的计算能力与便捷的操作方式,对所需要的点的坐标进行大量取样,通过光滑的曲线将所有取样点进行连接,这样所绘制的轨迹可以代表真实的运动轨迹。
3 数据采样
3.1 数据采样前期机构的初始数据整理
数据采样前期针距参数见表1。
3.2 封闭四杆机构运动求解
B点坐标求解:
[ZB=ZA+AB*cos?] (1)
[YB=YA+AB*cos?] (2)
在上式中,[ZB]和[YB]是B点坐标,[ZA]和[YA]是A点坐标,[AB]代表凸轮长度,[cos?]代表AB与水平面夹角的余弦值。
C点坐标求解:
[Zc-ZB2+Yc-YB2=BC2](3)
[Yc-YF2+Zc-ZF2=CF2] (4)
其中,[BC]代表B点到C点之间距离,[CF]代表C点到点F之间距离,[YF]和[ZF]是F点的坐标。
用式(3)减去式(4)得:
[2ZcZF-ZB-Z2F-Z2B+2YCYF-YB-Y2F-Y2B=BC2-CF2](5)
继续计算式(5)可得:
[Zc=BC2-CF2+Z2F-Z2B+Y2F-Y2B-2YF-YBYC2ZF-ZB](6)
为了简化运算过程设:
[b=BC2-CF2+Z2F-Z2B+Y2F-Y2B2ZF-ZB]
[K=-YF-YBZF-ZB]
(6)简化为:
[ZC=kYC+b] (7)
将(7)代入(3)解得[YC]:
[YC=kZB+YB-bk±kZB+YB-bk2-1+k2Y2B+Z2B-2bZB+b2-CB21+k2]
4 Excel表格数据采样与数据处理
根据上述公式,可以在Excel表格中通过函数运算对数据进行处理,前期进行基础数据收集,初始数据在Excel函数中采用绝对引用,在选择单元格后同时按下F4点,表示引用数据是固定的数值。在运算过程中,必须先把角度转换为弧度,并采用Excel表中的ROUND函数对所求数据的有效数位进行规定,本次示例采用的是将运算结果的有效数位保证9位。具体操作如图4所示。
以此类推,可以根据初始数据、各机构的运动关系及约束条件在Excel表格中计算出优化后的送布牙的运动轨迹。
5 参数化应用
5.1 初始数据
通过三维绘图软件,对所需点的坐标进行测量,测量出初始数据,利用机械机构本身的约束条件对未知点的坐标进行函数表示,搭建好平台,后期设计可以直接更改这些初始参数,获得不同的运动轨迹,实现快速设计的目的,这样可以大大缩短设计周期。表2为四杆机构的初始参数。
5.2 针距机构分析
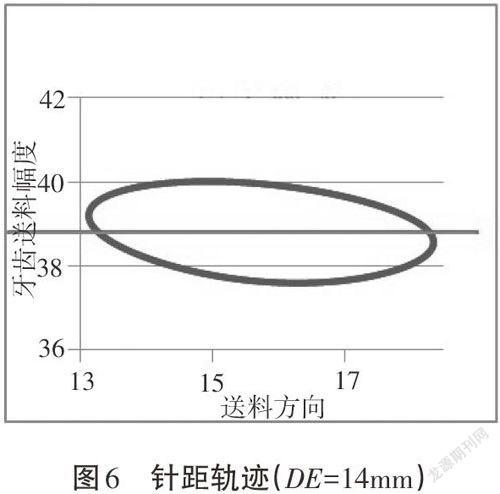
由针距机构分析可知,曲柄、连杆的长度、位置以及调节曲柄与水平面的夹角都会影响针距大小。因此,要想改变针距的大小,需要改变的量较多。针距的大小直接由送布轴转角决定,连杆DE的大小决定送布轴的摆幅,显然,在其他条件不变的情况下,连杆DE越短,摆角越大。比如,只改变其中某单一变量来达到增大针距的目的,在这里首先尝试改变DE的长度,测量相应长度下的针距。通过建立送布机构的数学模型,利用Excel软件强大的数据运算能力,即可求得不同DE长度下主送布牙的轨迹。
对比3种不同长度的杆长DE,可得到不同的送布轨迹,杆长DE微量变化,可以大幅度增加針距大小。最后对不同条件下的针距进行分析,得出合理的技术参数。参数优化设计是设计人员必须掌握的一项实用的办公方法。
6 结 语
Excel软件的数据处理,对机械传动机构的四杆机构函数化处理,将机构设计转化为数学函数,缩短产品设计周期。提高自身设计能力。办公软件与专业的3维软件仿真相结合使用,相互验证,保证结果的准确性,缩短机构的验证周期,提升设自己计能力,对机械机构有更加深刻理解。
参考文献:
[1]税清路.工业平缝机送料机构概念设计理论与方法研究[D].上海:上海交通大学,2003.
[2]于贺宪.平面四杆机构的工作特性及设计[J].黑龙江科技信息,2009(8):30.
[3]邹慧君,傅祥志,张春林,等.机械原理[M].北京:高等教育出版社,1999.
[4]杨可桢,程光蕴,李仲生.机械设计基础[M].北京:高等教育出版社,2006.
[5]刘江南,郭克希.机械设计基础[M].2版.长沙:湖南大学出版社,2009.
