在线同步对称拉伸仪的研发及应用
2018-09-08周天楠刘齐锐蔡绪福杨昌跃
周天楠,刘齐锐,蔡绪福,杨昌跃
(四川大学 高分子科学与工程学院,四川 成都 610065)
X射线衍射技术是研究高分子材料微观结构在外力场(如剪切场和拉伸场)下演变的重要检测手段。通过表征高分子材料不同尺度有序结构(晶粒尺寸、片晶大小、晶胞尺寸、分子链构象、无定形区分子链排布等)在外力场下的演变情况,建立材料结构与材料性能之间的关系,能够为材料的加工工艺和应用方法提供理论依据。配置在线拉伸附件后,X射线衍射仪可以研究材料内部的微观晶体结构在拉伸场下的演变过程,从而扩大了设备的研究范围,提高了设备的使用效率。如将试验方法综合材料加工工艺运用到本科教学和研究生教学中,能够培养学生数据分析的能力,促进学生逻辑地思考实验方案设计,同时发挥大型先进科研仪器设备在实验教学中重要的作用[1-2]。
1 研究背景
基于取向晶体产生的衍射环会向两极收缩变成衍射弧,取向度越大则衍射弧越短的理论基础,二维X射线衍射仪的二维探测器通过接收2θ角度范围内的所有衍射环信号,得到整体衍射弧的变化情况[3],如图1所示,获得数据直观且全面,耗时短,一般测试时间在3 min左右,因此二维X射线衍射仪在表征材料晶体取向结构时具有很大优势。
四川大学高分子科学与工程学院配置的二维X射线衍射仪如图2所示。该仪器不仅能表征材料晶区结构、晶粒尺寸、片晶大小,还是表征聚合物晶区取向度的有力工具。利用该台设备表征的聚丙烯纤维和聚丙烯注射样条的二维X射线衍射谱图如图3所示,图上能够很清晰地反应出材料晶区取向情况。该仪器在聚合物取向、薄膜拉伸成孔机理、聚合物结构性能关系等方面的研究上,学院已发表多篇SCI论文[4-6]。

图1 二维X射线衍射仪收集衍射信号示意图

图2 配备二维面探测器的X射线衍射仪

(a)聚丙烯纤维 (b)聚丙烯注塑样
由于缺乏在线拉伸附件,该仪器目前只能对高分子材料进行原位检测,不能实时监测高分子材料内部晶体结构在拉伸场下的演变情况。虽可通过“先拉伸试样—再固定试样拉伸比—最后测试”的方法进行离线检测,一定程度上说明结构演变的某些问题,但该方法依然存在以下弊端:1)样品在拉伸后转移过程中不可避免会发生应力松弛,材料结构发生改变,不能严谨地反映材料某一尺寸结构与材料某一宏观性能之间的对应关系;2)不可连续地检测材料结构的演变过程;3)测试过程中测试点不能准确复位,测试结果不够严谨。因此研发一种具有对称拉伸功能,能够放置在操作空间中并可以与测试设备连接的拉伸装置十分有用。
2 研究方案及实物结构
2.1 研发方案
结合高分子材料拉伸测试及X射线衍射仪测试条件,该装置在设计时需要考虑4个要求。1)试样必须对称拉伸,才能保证X射线始终照射在样品的中心位置上。测试结果才是结构演变与拉伸过程的关系。2)拉伸速度范围可调,能用于低速、中速、高速乃至急速条件下结构演变的研究。3)夹持装置能够牢固夹紧样品,由于高分子材料在拉伸过程中体积会变小,夹持装置在测试过程中必须实时夹紧样品。4)设置合适的电机、电机控制软件、测试控制程序来控制样品的拉伸过程。
图4是自主设计的在线同步对称拉伸仪主体部分的设计图,包括对称拉伸机构、传动机构、夹持机构和支撑框架[7-11]。对称拉伸机构由两个并排的丝杠螺母副、两个滑块和两个压板组成,丝杠螺母副由一根具有两段相反旋转方向螺纹的丝杠和两个分别与两段螺纹相匹配的螺母组成,每个滑块穿过两根并排的丝杠,与两根丝杠上位于同一方向螺纹段的两个螺母固定连接,且两个滑块在丝杠上对称安装,每个滑块内部的螺纹与对应的丝杠螺纹相匹配。
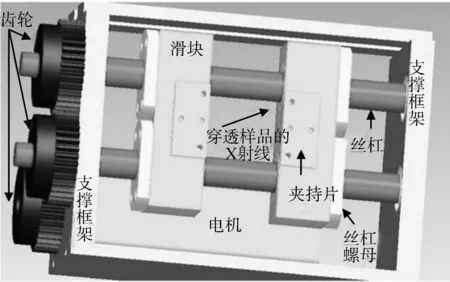
图4 在线同步对称拉伸仪三维示意图
传动机构的设计是由电机、与电机同轴连接的主动齿轮和在两根丝杠端部安装的两个从动齿轮组成,其中一个从动齿轮与主动相互齿轮咬合,两个从动齿轮相互咬合,电机转动带动主动齿轮转动,主动齿轮带动两个从动齿轮做相向运动,使得两根丝杠能够同步旋转。由于两根丝杠的螺纹方向相反可带动滑块向一侧运动,加之每根丝杠的螺纹为左右对称,因此丝杠旋转过程中两个滑块能同速向两侧移动,从而保证样品在拉伸过程中能被对称拉伸,保证被X射线照射的中心位置不变。
夹持部分是由夹持片、垫片、紧固螺钉和压紧螺钉组成。夹持片上有3个孔,紧固螺钉穿过两边的通孔将夹持片固定到滑块上,用于夹持样品。中间的孔装有压紧螺钉,旋转压紧螺钉对夹持片下的垫片进一步施压,将垫片紧压在样品上,通过垫片在紧压下的弹性形变将样品压紧在拉伸仪上,防止样品在拉伸过程中体积减小压片无法夹持牢固而滑脱的情况。
2.2 实物结构
实际制造过程中,在线同步对称拉伸仪实物图及拉伸天然橡胶薄膜时的状态如图5所示。按照图2所示的射线装置工作台大小设定同步拉伸仪尺寸,如图5所示,设定金属框架长度(不含齿轮)为14.5 cm,X射线通过的位置(中心位置)距底框底部5.7 cm,电机高度低于中心位置,宽度根据电机大小尺寸设定。夹块间最大相对位移为11 cm。

(a)在线同步拉伸对称仪侧视图及齿轮转动方向

(b)实物的金属框架长度

(c)实物的中心位置高度
在线拉伸装置的拉伸速度范围需要控制在0.005~5 mm/min范围内,以保证测试过程中拉伸速度和测试时间匹配。由于伺服电机能实现位置、速度和力矩的闭环控制,保证电机低速运行平稳,加减速的动态响应时间短(一般在几十毫秒之内),抗过载能力强,发热和噪音低,故采用伺服电机。考虑能够精确控制位置、转矩等参数以及便捷的人机交互和通讯等方面的因素,采用嵌入式可编程逻辑控制器(PLC)控制系统[12]。
3 应用及教学实例
聚合物材料相对于金属材料有较高的比强度、绝缘性、高弹性、加工流动性,其使用的便捷性备受人们青睐。但聚合物材料的结构和使用性能受加工过程的影响较大,在挤出、注射、吹塑、压延等加工过程中聚合物分子链受到具有梯度分布剪切应力场的作用,该作用力下聚合物分子链段、聚合物分子链以及微晶区会发生不同程度的取向,取向的分子链沿着取向方向排列,该区域单位体积内的化学键数目增加,使得材料在取向方向上抗拉强度大幅度提高[13-14]。在动力学上,取向后的聚合物链段更容易排入晶格形成晶体,晶体高的强度和模量能有效提升材料的机械性能。由此可见材料结构与性能之间存在很大的相关性,因此掌握聚合物材料晶区取向度和演变过程的表征方法可为从事材料结构与性能关系研究人员奠定实验基础技能[3,15]。
Hermans取向因子法是表征单轴晶系取向模型的计算方法[16-17],描述的是分子链轴相对于参考方法的取向程度,如图6所示。

图6 聚合物链轴与拉伸方向
根据单位矢量球中分子链轴和拉伸方向之间的几何关系,Hermans计算出取向因子为:
(1)
式中,〈cos2φ〉为取向参数,可根据特定晶面(hkl)随φ角变化的衍射强度I(φ)推出,计算方法为:

(2)
式中,φ是分子链轴方向(例如c轴方向)和参考方向(在本实验中为剪切流动方向)之间的夹角,称为方位角;I(φ)是随方位角φ变化的衍射强度。当f=1时,表示分子链完全沿剪切流动方向取向(理想取向);当f=0时,表示分子链无规取向;当f=-0.5时,表示分子链垂直于流动方向取向。
以此为基础建设结构表征—性能测试的综合实验课程,主旨在于探讨拉伸诱导结晶和拉伸取向的过程机理,以及与材料性能变化之间的关系。采用理论知识讲解一个学时,拉伸性能测试实验讲解一个学时,X射线衍射仪仪器原理及操作讲解一个学时。将拉伸实验和X射线表征实验在样品性能表征的基础上系统且逻辑地关联起来。
3.1 天然橡胶拉伸试验
针对该在线同步对称拉伸仪采用天然橡胶片材进行测试,测试样品横截面积1 mm2,拉伸速度为1 mm/min,最大运动位移为50 mm,在拉伸比为0%、200%和500%采集数据,拉伸初始状态如图7所示,拉伸过程如图8所示。

图7 在线同步对称拉伸仪拉伸天然橡胶的初始状态

图8 在线同步对称拉伸仪拉伸天然橡胶的过程
如图9所示的测试结果表明天然橡胶在拉伸比大于500%时会产生明显的诱导结晶,且晶区呈现明显的取向结构,如图9(c)中出现的明亮的短弧线。

图9 橡胶在拉伸过程中材料内部晶体结构的演变
3.2 聚乙烯(PE)片拉伸试验
采用PE材料片材,试件的截面积为0.5 mm2,最大运动位移50 mm,拉伸速度为0.1 mm/min。进行在线拉伸测试。结果表明材料在拉伸过程中晶区衍射弧变短,晶区发生了取向,在教学中引入Hermans取向因子计算法得出材料的取向度从拉伸比为0%时的0.03增加到拉伸比为320%时的0.12。如图10所示,测试谱图显示衍射弧在拉伸过程中变短的同时宽度增加,说明在拉伸取向过程中晶区尺寸变小,结晶结构在外力下被破坏,大晶粒被拉碎变成小晶粒。

图10 PE薄膜在拉伸过程中材料内部晶体结构
4 结束语
通过自主研发的在线同步对称拉伸仪与二维X射线衍射仪配合使用,可在线检测材料在拉伸过程中晶区结构的演变情况,由于能实现同步对称拉伸,避免了离线检测时样品在转移过程中测试点位置不能完全复位、转移过程中样品结构发生变化的可能。通过压板和垫片同时紧压,保证拉伸过程中既能牢固夹紧样品不滑脱夹具,又不会夹断样品,及时适应拉伸过程中高聚物样品体积减小的特点,保证测试的顺利进行。采用伺服电机实现精确控制速度,采用程序编译系统对丝杠转动速度进行控制,拉伸速度可调可控,反馈速度数据,测试数据精确度高,人机交互性良好。将其运用在本科教学上对学生知识综合运用、逻辑性设计实验方案,系统性分析实验结果的能力培养具有促进作用。