基于TRACK对桥梁健康状况分析
2018-09-06于龙昊丁克良刘明亮刘亚杰罗麒杰
于龙昊,丁克良,刘明亮,刘亚杰,罗麒杰
(北京建筑大学,测绘与城市空间信息学院,北京 102616)
0 引 言
桥梁的健康状况一直是国民关注的重点,它不仅关乎国民的交通安全还与国民经济发展密不可分。大多数大跨度桥梁易受环境或地震的影响,进而产生变形或振动,而大多数中小跨度桥梁因时间老化或车辆负重也会产生一定的变形或振动。因此,对桥梁健康状况进行监测和分析就显得至关重要[1]。
目前,国内外研究桥梁健康监测的最为普遍的方法就是GPS技术。GPS监测凭借高精度、高采样率、全天候、实时性等优点已在桥梁的动态监测方面具有显著的作用,且TRACK模块的精度也达到了理想的效果[1-5,7]。随着高频GPS接收机的不断涌现。利用高频GPS监测手段对桥梁瞬时形变的技术也有了很大的提高,对于动态数据的算法研究和改进也越来越深入。
本文利用GAMIT/GLOBK10.61中双差动态定位TRACK模块对某桥梁24 h的实测数据进行了动态单历元数据后处理,分别得到了车辆高峰时段和夜间时段的桥梁高程振动时间序列,又通过经验模态分解方法(EMD)使桥梁振动的时间序列降噪处理更直观,并通过与GAMIT/GLOBK得到的高程数据对比差值,更明显的桥梁振动情况,对比分析了车辆对桥梁健康状况的影响,进一步验证了TRACK对桥梁状况分析方法的可行性。
1 TRACK模块
1.1 TRACK模块简介
TRACK是GAMIT中一个单历元动态定位模块[6]。TRACK模块凭借其单历元动态算法能够广泛应用于变形监测、地震监测、道路信息采算可以得到测站每个历元的三维坐标和单位权中误差,从而得到移动站的运动轨迹。
TRACK 模块有三种定位模式LC、和 L1、L2。当基线长度大于 1 km时,单频的定位模式不能有效消除电离层延迟,LC组合可以基本消除电离层延迟误差,TRACK一般选择LC组合模式进行解算。当基线长度小于 1 km 时,由于短基线两端观测环境相关性极强,差分后电离层延迟、对流层延迟都会得到很大的削弱,在距离基准站小于10 km 的情况下TRACK 的定位精度优于1 cm,这种情况可以使用单频的 L1 、L2 的定位模式[7]。
TRACK模块可以输出不同坐标系下的单历元坐标,本文实验案例使用GEOD输出得到了大地坐标系坐标,其它可输出的坐标系分别为X,Y,Z笛卡尔直角坐标系坐标、DHU 输出得到的是相对于移动站先验坐标的N、E、U站心坐标、N、E、U输出得到坐标系统考虑了地球曲率影响的N、E、U坐标、DUMP用来输出ionex 对于解算结果的影响。
1.2 TRACK定位原理
TRACK模块的定位原理和载波相位后处理技术(PPK)类似,都是采用载波相位观测值进行差分相对定位,从而得到差分站在选定坐标系中的坐标。载波相位差分的重点是求解整周模糊度,整周模糊度确定后即可进行定位,TRACK模块首先输入的文件为rinex格式的观测数据,根据数据情况分配模糊度参数;然后解算模糊度整数值,无论是长基线还是短基线都普遍使用双频P码伪距观测量和相位观测量组合求解模糊度的“M-W”来计算宽巷模糊度[8-9]:
(1)
式中:φi为对应的相位观测量;fi为Li波段的载波频率;Pi为对应的伪距观测量。
最后根据残差平方和最小准则选出正确的模糊度整数解,由整周模糊度值解算观测点的精确坐标,进而得到运动轨迹。
2 实测算例
2.1 GAMIT TRACK数据后处理
对某桥梁的健康情况进行监测,本文的实验方案分为静态实验处理案例和动态实验处理案例两方面进行分析,具体实验方案如下:
为了对桥梁进行静态和动态监测,实验于2017年4月8日对该桥梁进行监测,测量仪器选取5台天宝R8接收机,分别在左桥和右桥桥墩处架设4台接收机,桥外架设1台地面干涉合成孔径雷达,架设1台接收机作为动态监测时的基准站,且基准站与桥上接收机距离小于2 km,接收机与电瓶连接保证能够连续观测24 h,接收机的高度截止角为15°,数据采样频率为1 Hz,位置采样率为1 Hz,周围空旷,并无树木遮挡,图1是桥梁上的GPS接收机实测图。
1) 静态数据处理:先利用GAMIT 软件加入chan,suwn,urum,lhaz四个站解出的静态基线,得到单天解的结果 h文件,再通过GLOBK计算出WY02,WY04,WY06,WY08的空间直角坐标转换至大地坐标后,通过GAMIT基线解算出的o文件得到均方根误差为0.23,满足精度要求,故本实验将得到的坐标作为已知值。
2) 动态数据处理:采用GAMIT软件中的TRACK模块对桥梁的动态数据进行处理。TRACK模块的输入数据选取桥梁一侧的4个GPS观测点作为差分站以及桥梁外1个稳定的GPS基准站。为了研究桥梁在车辆通过时的振动情况,使用TEQC软件截取5个观测点在车辆早高峰6:00-8:00时段的动态观测数据,以及夜间凌晨1:00-3:00时段的动态观测数据。并采用GAMIT TRACK模块对5个点进行单历元解算,TRACK模块数据处理输入文件如表1所示。
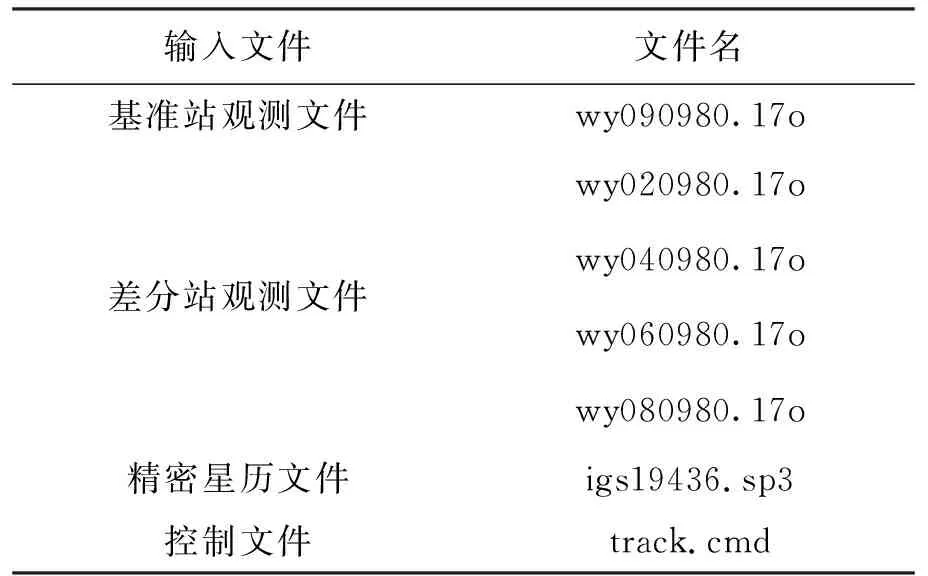
表1 TRACK模块输入文件
由于所处理数据为短基线观测,因此在track.cmd中修改基线类型为short,修改坐标系为GEOD大地坐标系,修改采样间隔为1 s,可以得到WY02,WY04,WY06,WY08点在每个历元下的大地坐标。
2.2 EMD去噪
由于GPS数据中叠加了多种因素的信号,如车载、风载、温湿度等因素。因此要在GPS数据中提取“干净”的数据,降低“噪声”的影响。针对动态测量结果受到高频噪声的影响,本文采用matlab编写的经验模态分解法(EMD)降噪程序对GPS桥梁上WY02,WY04,WY06,WY08的动态数据进行降噪,通过对桥梁上四个监测点的振动信号重构得到更精确的桥梁纵向高程变化。
2.3 数据分析
为反映桥梁监测点处的纵向变形变化趋势,将经过EMD去噪后的TRACK模块得到的单历元时间序列与 GAMIT/GLOBK解算得到的桥梁监测点处大地高作差值,分别得到不同时段ΔH随历元变化的序列,并求得桥梁上监测点的位移平均值,并进行分析。车辆高峰时段桥梁监测点振动情况如图2所示,夜间时段桥梁监测点振动情况如图3所示。
图2中该组实验结果为车辆高峰(6:00-8:00)时段的桥梁四个监测点的瞬时振动情况,图中横坐标为车辆高峰时期的历元数,纵坐标位移表示TRACK计算得到的大地高与已知高程数据之间的差值,可见0时刻时位移量为负值,说明桥梁在车辆高峰时段有所下沉。此时段桥梁上WY02、WY04、WY06、WY08监测点的下沉量平均值分别为-0.03 m,-0.062 m,-0.047 m,-0.113 m;且四个监测点的振动位移走势基本一致,降噪曲线也比原始数据曲线更加平滑。另外,在2600历元左右处,桥梁的四个监测点基本同时出现了较大的位移波动,这可能是因为在2600历元左右,有大型车辆依次在这四个监测点旁通过的现象,造成了桥梁产生了瞬时形变量达到12 cm的明显振感,结合地面干涉合成孔径雷达对本桥梁的结果分析,该时刻地面干涉合成孔径雷达接收到的信号也出现分米级振动位移;除这一段时间外,桥梁的位移高程差大部分在1~2 cm,可见高峰时段车速缓慢,桥梁振动幅度不明显。
图3所示中实验结果为夜间(1:00-3:00)时段的桥梁四个监测点的瞬时振动情况,从该图可明显看出,在夜间时段的0时刻,监测点位位移量也都为负值,此时段桥梁上WY02、WY04、WY06、WY08监测点的下沉量平均值分别为-0.023 m,-0.044 m,-0.016 m,-0.178 m,可见下沉位移量相比车辆高峰期的下沉量小;图中监测点位移波动较为明显,但WY02、WY04、WY06、WY08四个监测点位移走势也基本一致,桥梁的位移高程差大部分在3~4 cm,可见夜间时段车速较快,桥梁振动幅度比车辆高峰时段明显。
结合车辆高峰时段和夜间时段桥梁经过经验模态分解降噪的振动位移图可以得出以下结论,在车辆高峰时段,桥梁产生下沉位移量随车辆的增加而增大,其振动幅度并不明显;在夜间时段,桥梁产生下沉位移量也随车辆的减少而减小,其振动幅度反而明显。
3 结束语
本文通过对桥梁实测的数据进行动态振动的数据后处理分析得出:
1) GAMIT/GLOBK软件的TRACK模块处理出的桥梁GPS单历元数据,能够对桥梁的瞬时位移和瞬时形变量进行动态监测,进而分析桥梁的稳定程度。
2) 针对桥梁受环境和载荷的影响导致变形量 较大的情况,采用经验模态分解的方法对原始数据进行降噪,通过对桥梁振动信号的重构得到更精确的桥梁振动细节和位移变化。
3) 结合车辆荷载得到桥梁的瞬时位移和变形可见,桥梁在车辆高峰时,下沉位移量较大,振动幅度较小;桥梁在夜间时段,瞬时形变量较小,振动幅度较大。