基于Sobel算子的混凝土表面孔隙率检测技术研究
2018-09-04伍昆仑申中鸿杨凯
伍昆仑,申中鸿,杨凯
(1.重庆赛宝工业技术研究院,重庆 401332;2.工业和信息化部电子第五研究所,广东 广州 510610;3.四川盐业地质钻井大队,四川 自贡 643021)
0 引言
重庆市作为一座历史悠久的山城,两江在此汇合,仅2017年便新开工桥梁17座,到2020年,主城过江通道将达到38座,构建 “七横七纵多联线”的快速路网,总通车里程将超过3 500 km。在这些道桥涵隧等建筑工程中,混凝土工程的质量水平直接影响着整体质量[1-2]。同时,在相关领域的质量检测技术方面也正面临着众多的难题,例如:快速在线检测、远程无人检测。目前,国内外均出台了一系列的混凝土质量控制技术规范和标准,从原材料、生产与施工等多方面对混凝土的质量进行控制。混凝土的主要质量指标有水泥孔隙率、气孔、蜂窝麻面和表面污染等,通过检测这些质量指标,可以判断建筑工程的整体施工质量的优劣。目前,通常都是通过切割建筑体标本,带回实验室,通过饱水法、溶剂法和压汞法等方法来测量混凝土的主要质量指标——孔隙率的,这些方法需要经过多种工序和较长的时间,才能得出结果[3-7]。如何能够快速、准确地判断混凝土的孔隙率,一直是业界比较关注的问题。基于此,考虑到施工现场条件的限制,本项目利用现代工业中常用的显微机器视觉技术和模式识别技术,重点研究并突破了道桥涵隧建筑施工现场混凝土质量指标孔隙率的快速检测技术。根据研究成果,可进一步地在建筑机械装置的微小性状和形变的计量检定中,针对有在线计量需要、测试环境空间有约束和测试人员较难达到的情况,开发相应的辅助测试系统。
1 显微机器视觉技术
显微视觉的基础是机器视觉技术,是在常规的机器视觉的基础之上,添加显微镜头来实现的。机器视觉技术,指的是利用模式识别、图像处理等相关技术对机器视觉设备如摄像机、照相机等采集的图像进行处理,并根据处理结果给出相关信息以进行识别或控制的技术。
机器视觉技术主要涉及模式识别与图像处理相关技术,其所涉及的内容有图像预处理 (包含色彩模型选择、图像分割和数学形态学处理3个方面)、目标特征选择和目标识别等。
1.1 图像色彩模型选择
RGB色彩模型是工业界的一种颜色标准,是通过对红 (R)、绿 (G)、蓝 (B)3个颜色通道的变化以及它们相互之间的叠加来得到各式各样的颜色的,RGB即代表红、绿、蓝3个通道的颜色,这个标准几乎包括了人类视力所能感知的所有颜色,是目前运用最广的颜色系统之一。RGB色彩模型是通用的面向硬件的模型,广泛地应用于彩色监视器和一大类彩色摄像机中。
1.2 图像分割
图像分割方法主要包含阈值分割法、特征空间聚类法、基于区域的方法、基于边缘侦测的方法、模糊集合方法和神经网络方法等。由于阈值分割方法的实时性较好,且分割效果良好,因此,被广泛地应用于机器视觉工业应用系统中[9-12]。
阈值分割法的主要思想是在不同的色彩模型与不同的特征维数下,通过图像像素的实际值与设定阈值的比较,分割出特定的区域。在不同的色彩模型中,均已经出现了一些相对成熟的阈值选取方法,例如:经验阈值法、色彩判断法、迭代法和基于灰度直方图的阈值选取方法等。
图像预处理还包括数学形态学处理。数学形态学的基础是作用于物体形状的非线性算子代数,它在很多方面都要优于基于卷积的线性代数系统。形态学处理的主要目的是增强物体结构 (抽取骨骼、细化、粗化、凸包和物体标记),并从背景中分割物体,以及实现物体量化描述。常见的图像形态学处理主要包括腐蚀与膨胀两个方面的内容。通常而言,膨胀可扩展目标区域,腐蚀则缩小目标区域。此外,膨胀可以填补凹洞,腐蚀能够消除细的凸起。
1.3 目标识别
对图像预处理完毕之后,需对图像中的目标区域进行特征提取,并据此对其完成分类识别。特征提取指的是对经预处理后,利用形状或者颜色信息检测到的目标区域进行进一步的信息特征提取,并使得提取的特征能够准确地描述或表达目标区域的特性。目标识别系统中分类方法和分类器的设计与分类决策过程是整个系统的最后一步,也是最关键的一步,其目的是通过对提取出的感兴趣区域特征进行分析,并结合已有的先验知识,识别出具体的目标。
2 基于Sobel算子的混凝土表面孔隙率检测
2.1 检测原理
随机采集某建筑施工现场混凝土表面 (表面经擦拭)照片,如图1a所示。利用40倍放大的显微镜头,作为前端机器视觉设备,对样品进行放大采集,放大后的局部照片如图1b所示。

图1 施工现场混凝土表面照片及放大后的局部照片
HIS色彩空间由RGB空间转换得到,二者的模型转换如图2所示,其转换公式为:


图2 RGB与HIS色彩模型
显微镜头放大后的混凝土表面在不同色彩空间下的情况如图3所示。从图3中可以看出,在HIS色彩空间中,H空间可以较为良好地反映出混凝土表面的孔隙特征:孔隙处的颜色较周围的颜色深,究其原因是由于孔隙所具有的深度特征在视觉下的颜色表现更为明显。因此,根据孔隙在显微视觉下的特征表现,可分析出孔隙的数据和大小。
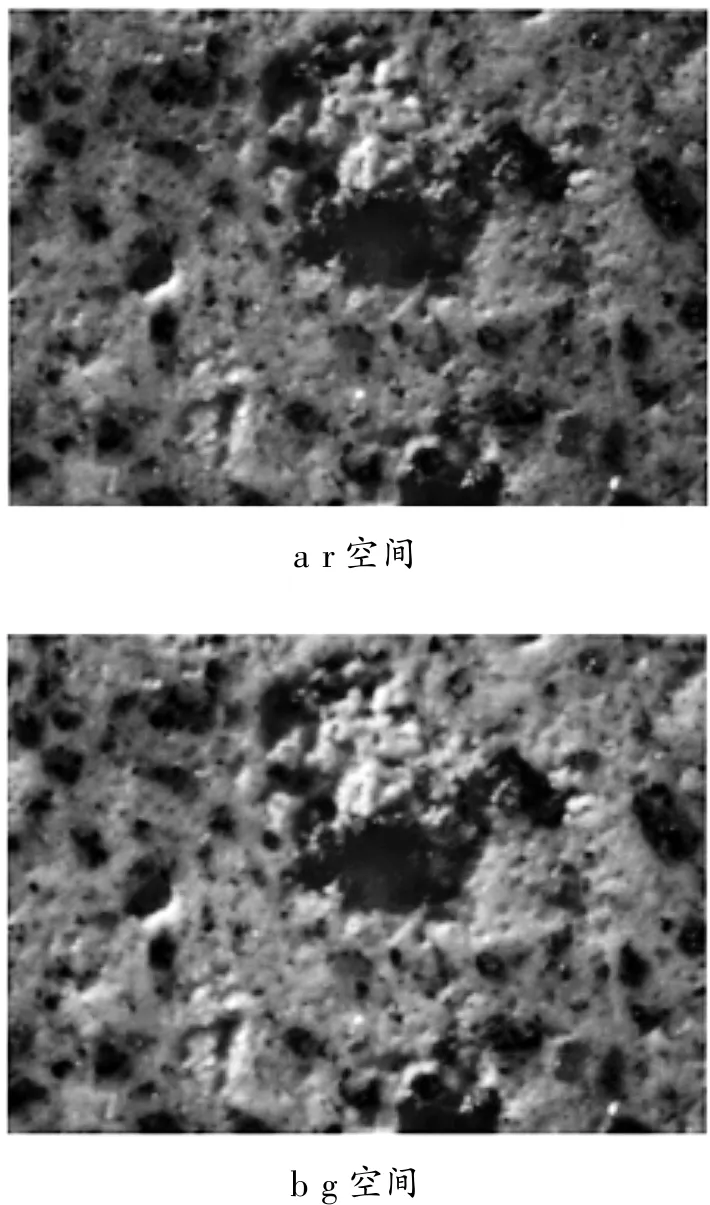
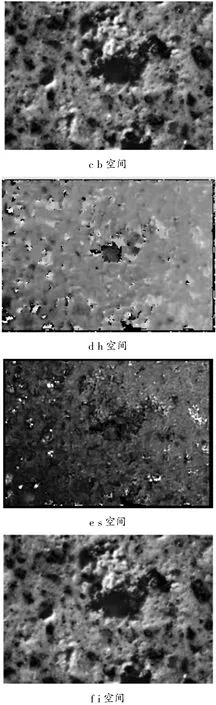
图3 显微镜头放大后的混凝土表面在不同色彩空间下的情况
2.2 核心算法
在显微视觉的建筑工程混凝土表面照片的H空间下,其孔隙处的颜色较周围的颜色深。孔隙边缘与周围的颜色相差较大,即亮度值在孔隙 (边缘)处发生不连续性,而不连续性可以用一阶和二阶导数来反映,因此,引入二维函数f(x,y)梯度的概念:

该向量的幅值是:



引入Sobel算子,利用数字化的近似来替代一阶导数值Gx和Gy。Sobel算子掩膜模型如图4所示,则一个邻域的中心点处的梯度为:


图4 Sobel算子原理
根据Sobel边缘检测算子,可以快速地分析出孔隙位置,并可根据孔隙位置,利用计算几何等技术,进一步地研究孔隙的大小、面积等信息,最终分析得到混凝土表面孔隙率的分布情况。
3 试验验证
随机采集了30个不同建筑工程的混凝土表面照片,对本文提出的方法进行验证。两幅较为典型的识别结果如图5所示。在图5a中,共识别孔隙494个,其最小面积为6 pixls,最大面积为1 739 pixls;在图5b中,共识别孔隙637个,其最小面积为6 pixls, 最大面积为1 505 pixls。从图5中可以看出,本文提出的方法可以有效地识别出建筑工程混凝土表面的孔隙。需要注意的是考虑到误差的影响,本文设置最小孔隙面积为5 pixls。

图5 不同建筑工程的混凝土表面典型识别结果
4 结束语
本文研究了如何利用显微机器视觉和模式识别技术 (尤其是Sobel算子)实现混凝土表面孔隙的快速、有效检测。下一步的工作是将本文所提出的方法与混凝土相关标准所规定的质量指标进行结合,开发形成具有实际使用价值的设备,并在道桥涵隧等建筑工程施工建设中开展应用,也可以应用在微米级长度计量和狭窄空间机械传动式压力计量器具检定系统的远程测试中。