基于改进型Smith模糊PID的直接空冷背压控制优化
2018-09-04王琦王岚景鑫白建云
王琦,王岚,景鑫,白建云
(山西大学 自动化系,山西 太原 030006)
0 引言
直接空冷机组通过机械通风的方式,以空气为冷却介质,冷却汽轮机排出的蒸汽[1]。对比同等容量的湿冷机组可节水80%以上,显著的节水能力使得其在我国“富煤少水”的北方得到了迅速发展和广泛应用[2]。汽轮机低压缸的排汽压力,称为直接空冷机组的背压。背压的控制品质直接影响整个机组的安全性和经济性[2-3]。
常规的PID控制策略对被控对象数学模型依赖性高,无法自动在线调整控制器参数,面对具有大迟延、不稳定的背压控制对象,无法达到理想的控制效果[4]。本文以某矸石发电厂2×300 mV直接空冷机组的背压控制系统为研究对象,设计了一种基于改进型Smith预估补偿的模糊PID控制方案,以风机作为执行机构,对直接空冷机组的背压进行控制。该方法可以利用模糊规则实现对控制器参数的在线调整,增强系统的鲁棒性;同时增加的改进型Smith预估补偿环节可以改善系统的纯迟延现象,提高系统的响应速度,减小系统的超调量。
1 直接空冷机组背压的控制特点
1.1 背压变化的原因
由于直接空冷系统以空气为冷却介质,通过机械通风对汽轮机排汽进行强制换热,所以背压受外界因素(如环境温度、环境风速、环境风向)的影响较大[5]。除此之外,背压的影响因素还包括机组负荷、风机转速、真空系统严密性和凝汽器表面清洁度等。一般直接空冷系统的额定背压是15 kPa,夏季满发背压则为34 kPa[6]。背压是空冷机组冷端系统的综合指标,因此在设计直接空冷系统背压控制策略时要充分考虑到各种影响因素,来保证机组的安全经济运行。
1.2 背压的基本控制
试验机组直接空冷背压控制方案为:首先在两组汽轮机的出口处布置三个测点,通过三选中的方式选取反映实际背压的测量值,然后将选得的两个测量值求平均后作为背压测量值,送入PID控制器的测量值一端。控制系统组态时,测量值一旦出现异常,报警器会自动发出故障报警。背压的设定值由运行人员手动设置在一定范围。PID控制器对设定值与测量值之间的偏差进行运算,然后将输出值作为轴流风机的控制信号。PID控制器和偏差值之间存在一个±0.1 kPa的调节死区,作用是允许设定值和测量值之间有±0.1 kPa的偏差[7]。
背压控制系统中设有手/自动操作器,当设定值与实际测量值的偏差过大时,或因环境温度过低、运行的风机数量过少时,运行人员将通过手/自动操作器令风机转速由自动控制转换至手动控制,如图1所示[8]。
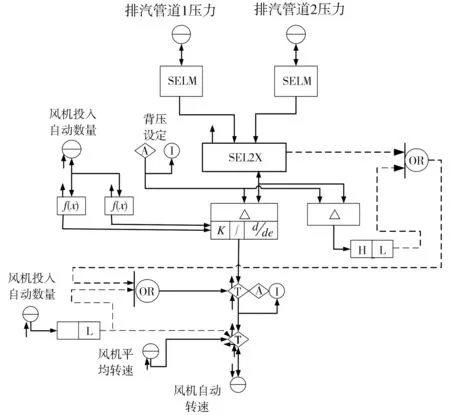
Fig.1 Direct air-cooled unit back pressure control system图1 直接空冷背压控制系统
1.3 背压控制对象的动态特性
以试验机组为研究对象,在环境温度25℃、环境风2 m/s以下(可以忽略环境风的影响)[9]的条件下,选择180 MW、260 MW和300 MW三个典型工况对系统模型参数进行辨识[10],得到某矸石电厂空冷机组背压的动态特性如表1所示。
2 背压控制策略优化
2.1 模糊自适应PID控制
由于工业控制过程系统庞大、控制环节繁多、控制环境多变,所以常规PID控制往往无法达到理想的控制效果。模糊理论的提出为解决这类问题开辟了新的思路[11],因此人们将模糊控制与PID控制结合起来,利用其各自优点形成模糊自适应PID控制[12]。
模糊自适应PID的控制结构见图2。
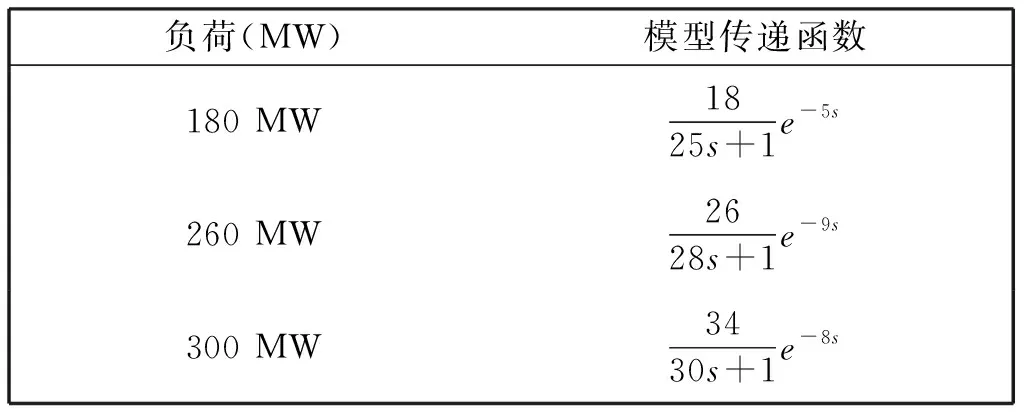
表1 不同负荷的直接空冷机组背压系统模型
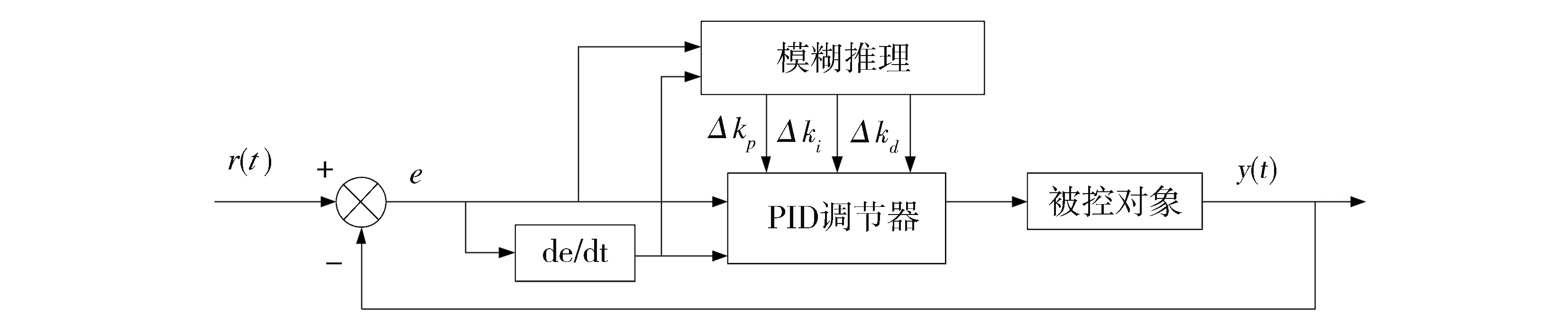
Fig.2 Block diagram of fuzzy adaptive PID control structure图2 模糊自适应PID控制结构框图
模糊自适应PID控制器[13]根据PID控制规律,选用两输入三输出结构,利用模糊推理实现对PID参数的自动调整,调节器参数的整定公式如式(1)所示。
kp=kp0+eΔkp
ki=ki0+eΔki
(1)
kd=kd0+eΔkd
其输入变量为误差e和误差变化ec,输出变量为PID控制器三个参数kp,ki,kd的修正值Δkp,Δki,Δkd。
首先定义输入变量误差e和误差变化ec和输出变量Δkp,Δki,Δkd的模糊子集均为{NB,NM,NS,ZO,PS,PM,PB};误差e、误差变化ec的模糊论域均为{-3,-2,-1,0,1,2,3};输出变量Δkp模糊论域为{-0.3,-0.2,-0.1,0,0.1,0.2,0.3};输出变量Δki的模糊论域为{-0.06,-0.04,-0.02,0,0.02,0.04,0.06};输出变量Δkd的模糊论域为{-3,-2,-1,0,1,2,3}。然后根据专家经验制定模糊规则表[14]。最后通过模糊推理与非模糊化处理,得到可以直接被计算机使用的控制量。
2.2 改进型Smith预估补偿的模糊PID控制
模糊自适应控制的PID控制器尽管对系统的控制具有更好的动态性能和抗干扰能力,但是对于因迟延引起的超调量大的问题并没有得到很好的改善。因此,对模糊自适应PID控制算法做了进一步的改进,引入Hang提出的改进型的Smith预估器[15],形成基于改进型的Smith预估补偿的模糊PID控制[16-17]。这种控制方法兼顾了Smith预估器和模糊PID控制器的优点,既对纯迟延环节起到了很好的补偿作用,增强了系统的稳定性,又提高了系统的动态性能,其控制结构如图3所示。
图3中GP(s)是对象除去纯迟延环节e-τs以后的传递函数,τ是纯迟延时间,Gm(s)是对象模型除去纯迟延环节的传递函数,e-τms是对象模型的迟延部分,Gf(s)是并联在Smith预估器上的控制器[18]。
(2)
式中Gc(s)是辅助控制器。当Gf(s)为一阶惯性环节时,控制器的积分时间常数等于模型的时间常数,则Gf(s)可简化为
(3)
其中:Tf是滤波时间常数,Tm是预估时间常数,Kc是Gc(s)的增益,Km是Gm(s)的增益。
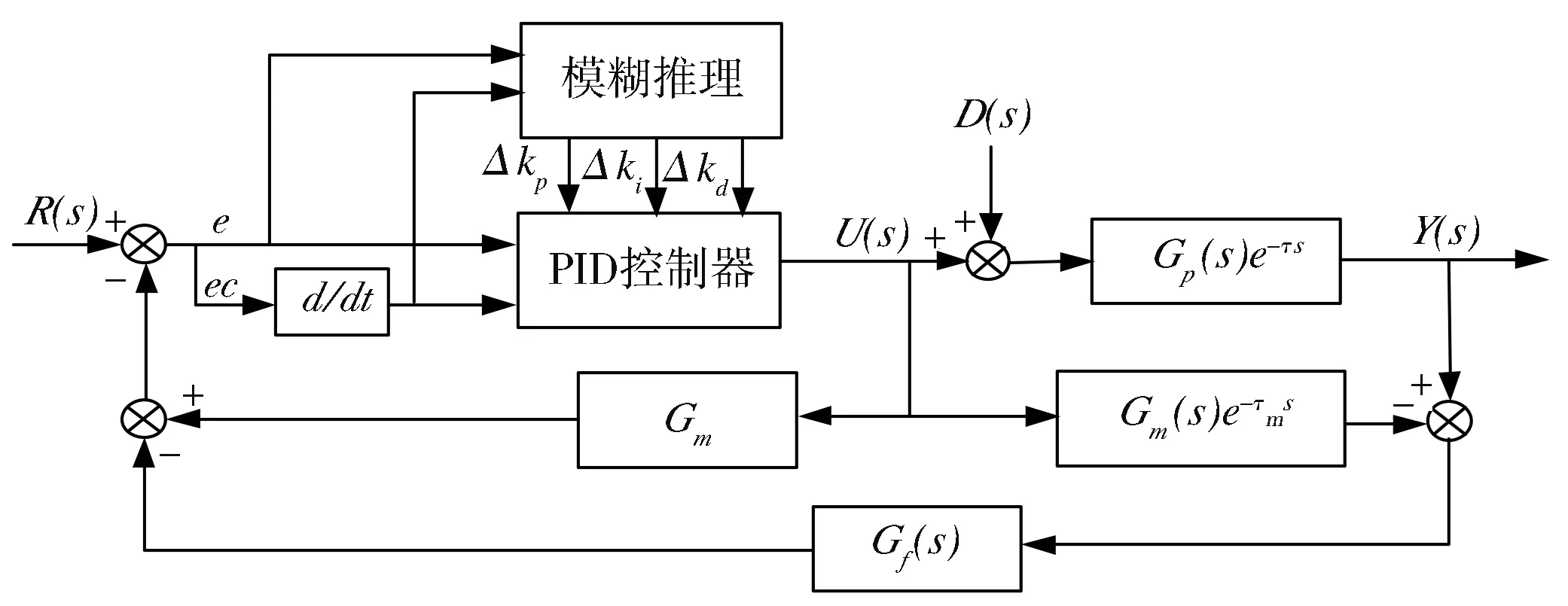
Fig.3 Improved Smith compensation and fuzzy PID control system图3 改进型的Smith补偿和模糊PID控制系统
3 背压控制系统的仿真及分析
采用已知的不同工况下的背压控制模型,在MATLAB软件的Simulink仿真平台上搭建空冷背压控制系统,仿真模型如图4所示。
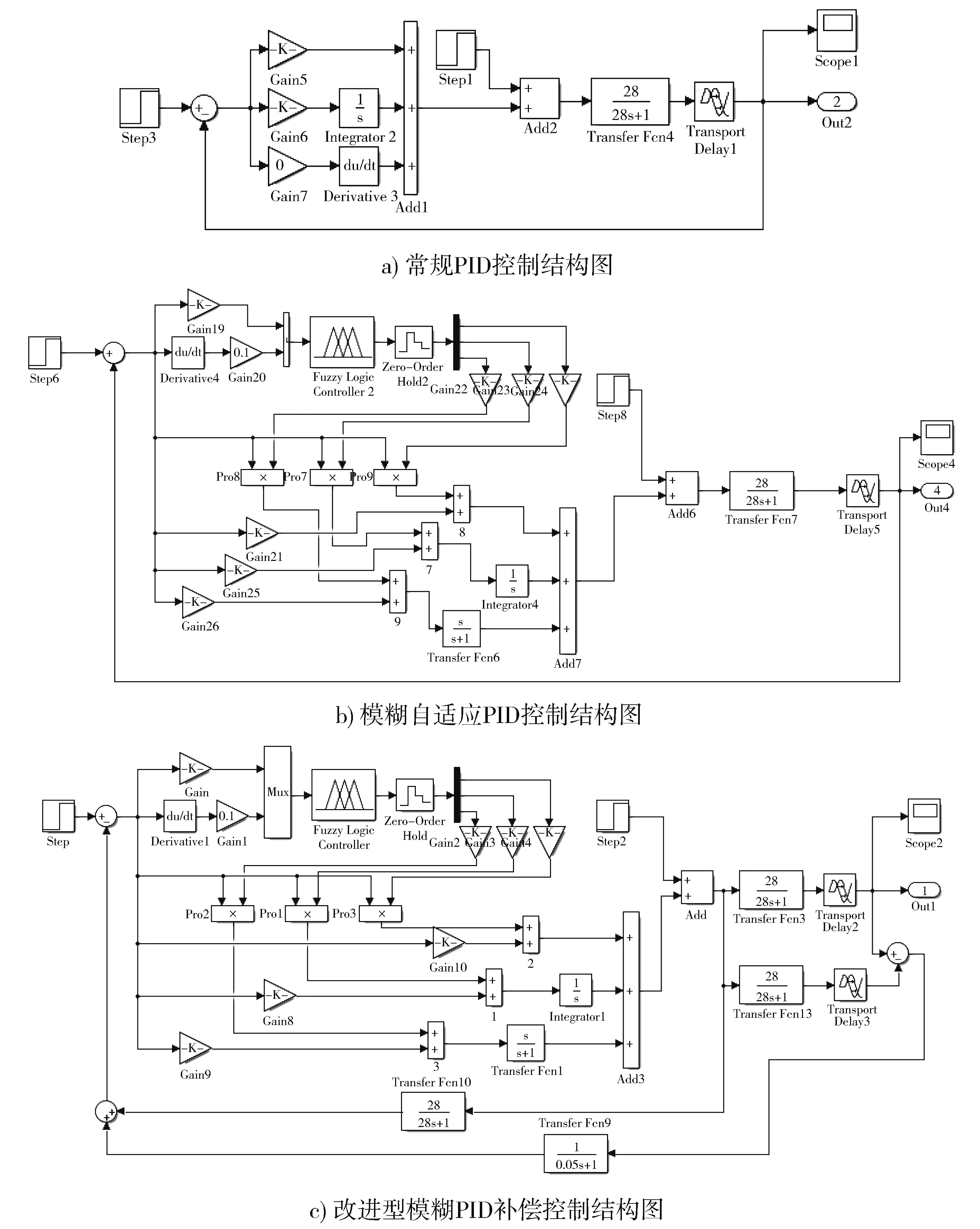
Fig.4 Optimization simulation models of three control algorithms图4 三种控制算法优化仿真模型
针对180、260和300 MW典型负荷工况,进行设定值扰动,得到仿真结果如图5所示。
为了测试各控制策略克服外扰的能力,在t=450s时加入扰动d=0.3,得到系统外部扰动的响应曲线,如图6所示。
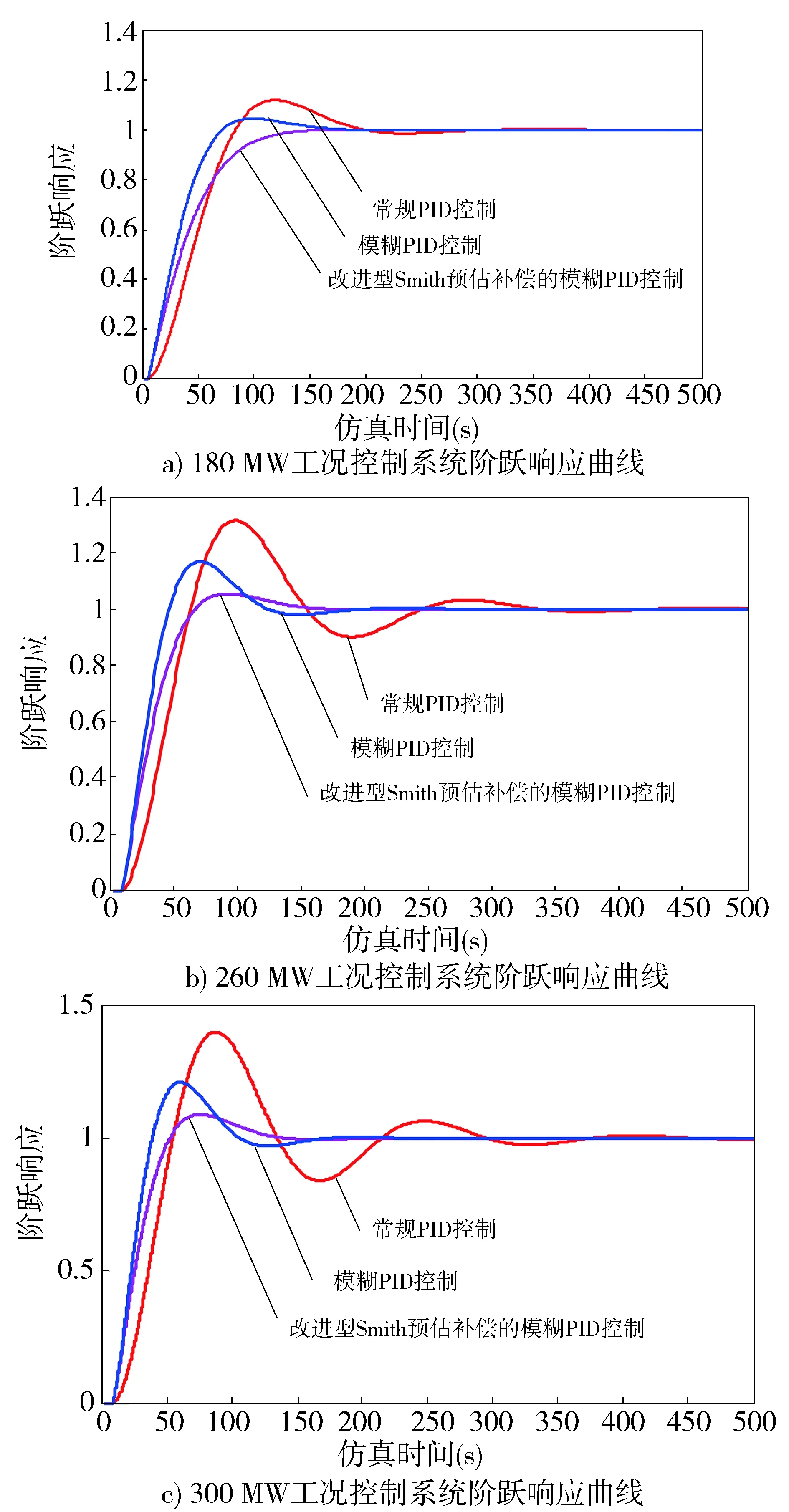
Fig.5 Step response curve under typical operating conditions图5 典型工况下的阶跃响应曲线

Fig.6 Disturbance response curve under typical operating conditions图6 典型工况下的扰动响应曲线
仿真结果表明,针对设定值扰动,改进型Smith预估补偿的模糊PID控制算法与模糊PID、常规PID的控制相比控制曲线更光滑,超调量大幅下降,响应速度更快,稳定性更好。在加入扰动时,该控制算法同样表现出较小的超调量和较短的调节时间。这些说明了在机组负荷工况改变的情况下,不论是设定值扰动还是系统外扰,基于改进型Smith预估补偿的模糊PID控制算法均优于模糊PID控制方法和常规PID控制方法,系统具有更小的超调量和调节时间,对系统模型的变化具有较强适应性和鲁棒性,同时有很强的抗干扰能力。
4 结语
本文以实际背压控制系统为研究对象,针对常规PID控制器参数调整方面不足、控制系统存在大迟延等问题,从控制算法改进方面进行深入研究,设计了一种基于改进型的Smith预估补偿的模糊PID控制方法,并结合直接空冷背压控制系统对象模型,分别从设定值单位阶跃扰动和系统外部扰动两个方面进行分析比较。仿真结果表明:该控制算法相较于模糊PID控制和常规PID控制而言,具有更小的超调量和系统调节时间,更好的系统模型适应能力和抗干扰能力,对直接空冷系统控制策略的优化具有一定的指导意义。
