紧框架小波与全变分协同稀疏的压缩感知图像复原
2018-09-04张晶马瑾邵晨桂志国张权杨婕
张晶,马瑾,邵晨,桂志国,张权,杨婕,*
(1.山西财贸职业技术学院 信息工程系,山西 太原 030031;2.山西中医药大学 医药管理学院,山西 太原 030619; 3.中北大学 电子测试技术国家重点实验室,山西 太原 030051)
0 引言
近年,伴随着信号采样技术的快速发展,能够从冗余度极低的稀疏信息中重构出原始图像的压缩感知(Compressive Sensing,CS)复原方法取得了很大的成功[1-2]。通过在采样过程中同时对信号进行压缩,CS方法能够利用采集到的少量稀疏数据,以远小于Nyquist定理规定的采样率高效地恢复出原始信号。CS理论指出,只要原始图像是稀疏的或者在某些变换域是稀疏的,则将高维空间的信号映射到低维空间后获取的少量投影中包含复原图像所需的足够信息[3]。
一般地,若长度为N的信号u的变换系数Φu的大部分值为0,或者Φu的大部分值为接近0的很小的数,那么信号u在变换域Φ是稀疏的[3-4]。CS复原过程相当于求解:
b=Au
(1)
其中,A为一个大小为M×N的随机测量矩阵,通过在A上投影可获取比稀疏信号u长度小很多的观测数据b。显然,方程(1)是欠定的且病态的,无法直接采用观测值b复原出原始信号u。为了复原u,需要求解下面问题,即
min‖u‖p,s.t.b=Au
(2)
其中,p为0或1,当u不满足稀疏的条件时,需先采用稀疏基φ=[φ1,…,φN]对u进行稀疏表示:
(3)
由此,可以得出CS测量过程[4]的表达式:
u=Aφδ
(4)
可见,图像的稀疏表示是图像压缩感知复原的关键一环,通常采用单一的基函数来表示图像。然而,富含光滑区域、边缘、细节、结构及纹理信息的自然图像是非常复杂的,仅采用单一基函数并不能获取图像的最优稀疏表示[5-6]。目前,压缩感知复原方法的一个研究热点是探索图像在各种稀疏变换(梯度变换[7]、小波变换[8]、剪切波变换[9]或冗余字典[10]等)域的先验信息对复原精度的影响。特别地,基于全变分(Total Variation,TV)变换的CS复原方法得到了广泛关注,表达式如下:
min‖u‖l,s.t.b=Au
(5)
尽管TV法允许图像存在边缘、纹理、结构等重要的不连续特征,可以取得较好的复原效果,但是TV函数的分片常数效应导致其具有非线性及不可导性,进而使得公式(5)的求解变得非常困难。目前国内外对该问题的主流求解方法包括:梯度下降法[11]、乘法算子交替迭代方向法(Alternating Direction Method of Multipliers,ADMM)[12]、迭代收缩阈值法[13]、两步迭代收缩阈值法[14]、快速迭代收缩阈值法[15]、增广拉格朗日法[16]、NESTA法[17]等。此外,由于仅考虑图像的平滑先验信息,该类方法常有图像细节和纹理的过平滑现象出现,采样率较低时,也会有阶梯状伪影污染。为了克服这些问题,学者们陆续提出了基于TV的改进算法,如强化了图像梯度域稀疏度及方向连续性的TVL1法[18],以及将帧内预测引入复原过程产生稀疏残差梯度域的基于图像块的CS复原法等[19]。近年,通过块匹配实现细节和纹理很好保留的基于非局部相似模型的方法也取得了不错的效果[20]。通过建立图像的局部几何结构,林等提出了几何结构导引的协同压缩感知图像复原法,该方法有效利用了自然图像的自相似性。此外,许多近期的研究结果表明,通过将某些变换域(如高斯混合GMM模型[21]、树形结构复杂小波变换[22]、曲波变换[23])的变换系数先验信息引入CS复原框架,也可以获取不错的复原效果。
由于具有多分辨率性和冗余性,基于紧框架小波的方法在稀疏逼近方面表现出比基于变分模型(如ROF模型等)方法更好地优越性。此外,蔡等在文献[24]中对紧框架和变分方法做了深入分析,指出紧框架模型可以根据解的奇异性顺序自适应地为已知图像在不同区域选出适当的微分算子。本文针对TV最小化方法在解决压缩感知图像复原问题时出现的纹理、细节信息丢失及阶梯状伪影污染问题,提出一种紧框架小波与全变分协同稀疏的压缩感知图像重构方法。
1 基本理论
1.1 紧框架小波
对于给定的Ψ={ψ1,ψ2,…,ψr}⊂L2(Rd),若存在仿射系统
X(Ψ)={ψl,n,k:1≤l≤r;n∈Z,k∈Zd}
(6)
其中,ψl,n,k表达式为
(7)

(8)

(9)

(10)

(11)
(12)

(13)

(14)

(15)
Wu={Wl,hu:(l,h)∈B},u∈Id
(16)
其中,B={(l,h):1≤l≤r,1≤h≤L}∪{(0,L)},u的小波框架系数可以通过Wl,hu=ql,h[-·]*u来计算,其中,
(17)
(18)
特别地,当W是一个紧框架系统的变换,根据UEP准则有:
u=WTWu
(19)
本文中,d=2,研究对象为二维图像。采用公式(14)和(15)所示方法,对于给定的尺度函数φ(x)(如图1(a)所示),可构造出两个小框架函数ψ1(x)和ψ2(x)(如图1(b)和图1(c)所示)。
Fig.1 The diagram of tight frame function图1 紧框架函数示意图
1.2 增广拉格朗日法
若有约束优化问题

(20)
其中,x∈RN,z∈RM,Γ∈RM×N,式(20)所示最小化问题的增广拉格朗日函数定义如下:
(21)
其中,η∈RM表示拉格朗日乘数,ε为正则化参数。
增广拉格朗日算法(Augmented Lagrangian Method,ALM)的基本思想是通过寻找拉格朗日函数F(x,η)的一个鞍点来求解公式(21)所示最小化问题。最小化F(x,η)过程可以分解为,①给定η,求解x;②采用①中求得的x,更新η的值,重复上述两个步骤,直到满足收敛条件,便可完成求解过程。其求解过程见算法1。
算法1 ALM算法 1. 令k=0,设初值ε>0,x0和η0; 2. while 停步条件不满足 3.xk+1∈argminxF(x,ηk); 4.ηk+1=ηk-ε(Γxk+1-z); 5. k=k+1; 6. 停步条件满足,停止迭代,输出结果
特别地,与传统拉格朗日函数不同,增广拉格朗日函数中包含平方惩罚项;与标准二次函数不同,增广拉格朗日函数中包含拉格朗日乘数η。
此外,为了便于理解本文方法的求解过程,这里介绍一个引理,详细内容见参考文献[28],即
(22)
式(22)所示最小化问题的解析解存在,且采用阈值法可得其闭式解为

(23)
2 本文方法
为了解决全变分最小化方法在解决压缩感知图像复原问题时出现的纹理、细节信息丢失及阶梯状伪影污染问题,本文通过设计能够在克服TV模型的分片常数效应的同时,可以有效逼近纹理、结构及边缘等重要信息的稀疏正则项来提高压缩感知图像复原质量。由于紧支撑小波框架在稀疏逼近方面具有优越性,提出一种紧框架小波与全变分协同稀疏的压缩感知图像重构方法。具体地,构造由能够稀疏逼近纹理、结构等信息的紧支撑小波框架的L0范数和能够有效逼近分段平滑函数的全变分的L1范数组成的非光滑的能量泛函来准确表征图像先验信息。本文模型如下:
(24)
可以看出,式(24)所示最小化问题所包含的联合正则项具有非线性和不可微性,很难直接求出该问题的解。由于,增广拉格朗日函数在最优点处的二阶导是正定的,具有严格的局部极小值[29],因此,本文采用增广拉格朗日方法将如式(24)所示有约束的能量泛函优化问题转换为无约束的混合泛函最小化问题。首先,通过引入辅助参数,即
(25)
可得转换后的拉格朗日函数如下:
(26)
(27)
(28)
其中,m为迭代次数,v,γ和λ分别表示与约束u=w,Wu=ξ和Au=b相关的拉格朗日乘子。分析式(26)和式(27)所示最小化问题,由于存在不可微项,需通过交替迭代方法将问题分解为更简单的子问题求解,由此,本文将该问题分解为如下A,B,C三个子问题,具体地,
A.求解w的子问题
给定u和ξ,经过简化,求解w的子问题变为
(29)
进一步地,采用阈值法,可得其闭式解:
(30)
B.求解u的子问题
借助于上一步求得的w和给定的ξ,求解u的子问题等价于求解下面最小化问题,
(31)
显然,可以很容易求得二次函数Ξ(u)的导数
(32)
(33)
此处,Μ+表示矩阵Μ的伪逆矩阵,由于计算伪逆矩阵的代价很大,本文采用最速下降法来求解u,
(34)
其中,gu表示目标函数Ξ(u)的梯度方向,
(35)
Ι表示单位矩阵,因此通过迭代求解(28)可获得u最优解。
C. 子问题求解ξ
利用前面求得的u,对ξ进行更新:

(36)
ξm+1=Η(Wum+1+γm,ξm)
(37)
其中,Η为硬阈值,
综上,本文算法的主要步骤见算法2。
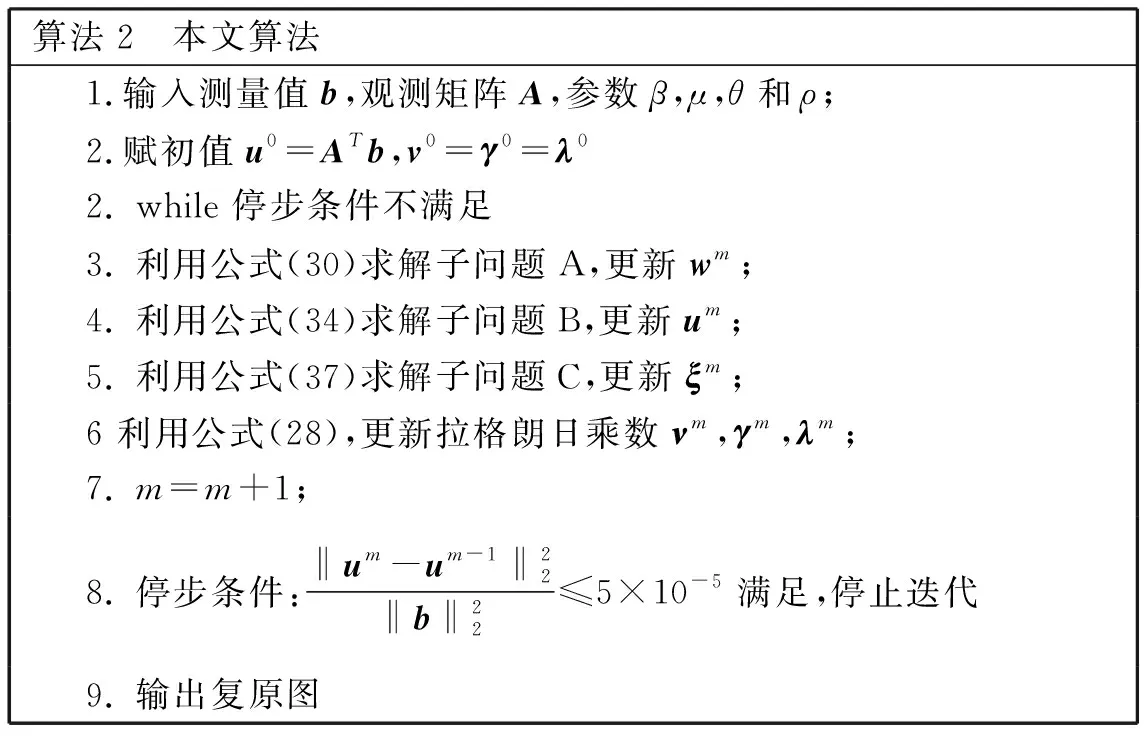
算法2 本文算法1.输入测量值b,观测矩阵A,参数β,μ,θ和ρ; 2.赋初值u0=ATb,v0=γ0=λ0 2. while 停步条件不满足 3. 利用公式(30)求解子问题A,更新wm;4. 利用公式(34)求解子问题B,更新um; 5. 利用公式(37)求解子问题C,更新ξm; 6 利用公式(28),更新拉格朗日乘数νm,γm,λm; 7. m=m+1; 8. 停步条件:‖um-um-1‖22‖b‖22 ≤5×10-5满足,停止迭代 9. 输出复原图
3 实验与分析
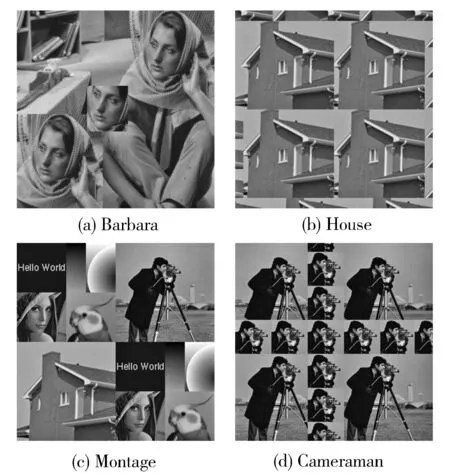
Fig.2 Original images used in the experiments.图2 本文实验采用的原始图像
为了验证本文算法的可行性和有效性,本文分别采用以“Barbara”,“House”,“Montage”和“Cameraman”命名的大小均为300×300的原始图像(如图2所示)进行压缩感知图像重构实验。计算机硬件配置为:Intel(R) Core(TM) i5-6500 CPU @ 3.20GHz,Windows7 32位操作系统;软件环境为:MATLAB R2014a。复原图像质量量化评价指标为峰值信噪比(Peak Signal to Noise Ratio,PSNR)和视觉信息保真度(Visual Information Fidelity,VIF)[30-32],PSNR定义如下:
(38)

(39)
(40)
(41)
其中,式(39)表示基于紧框架模型的压缩感知重构(简记为TF-CS),式(40)为文献[34]中提出的基于TV模型的压缩感知重构方法(简记为TVAL3)。公式(41)为文献[35]提出的基于联合稀疏约束的压缩感知重构算法(简记为TVNLR)。本文实验中,参数设置为:β=0.038,θ=0.037,ρ=0.014,λ=17.5。通过对原始图像进行高斯随机投影获取CS测量数据,具体地,通过调用Matlab库函数randn()可生成式(19)中的系统矩阵A:
randn(Μcs,Νcs),ratio=Μcs/Νcs
(42)
当采样率分别为25%,35%,45%时,分别采用TF-CS、TVAL3、TVNLR以及本文方法获得的压缩感知Barbara、House、Montage和Cameraman重构图像分别如图3-图6所示。
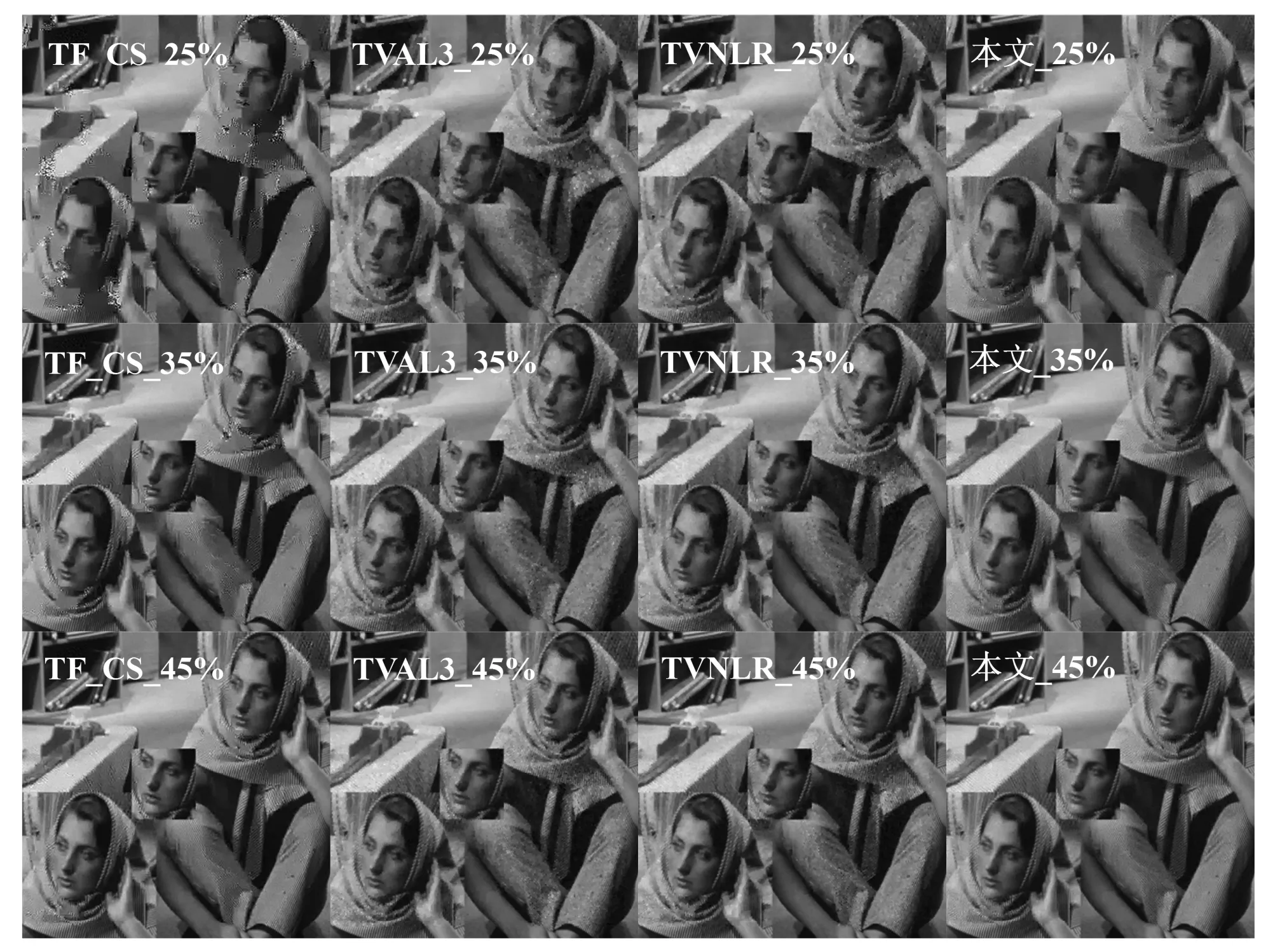
Fig.3 Obtained recovered Barbara images from different measurements(or ratios)图3 采样率不同时,获得的不同Barbara重构图像
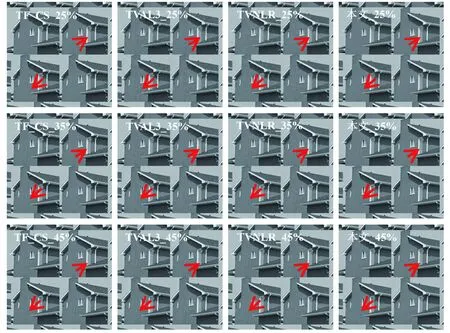
Fig.4 Obtained recovered House images with measurements(or ratios)图4 采样率不同时,获得的不同House重构图像
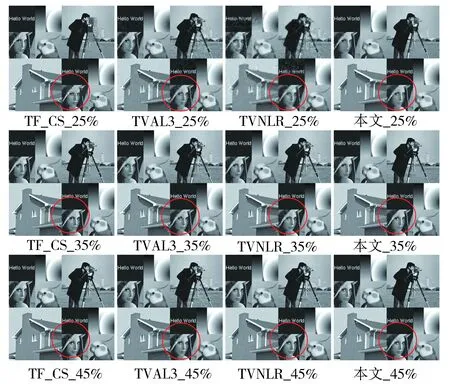
Fig.5 Obtained recovered Montage images with measurements(or ratios)图5 采样率不同时,获得的不同Montage重构图像

Fig.6 Obtained recovered Cameraman images with measurements(or ratios)图6 采样率不同时,获得的不同Cameraman重构图像
观察图3-图6可以看出,总体而言,四种压缩感知重构算法的结果图质量均随着采样率的增大而提高,说明测量数据的不完备程度直接影响重构效率,如何能够在数据量较小的情况下复原出质量更高的图像是本文需要解决的核心问题。当采样率相同时,本文算法的重构图在纹理、结构及边缘等重要信息保留方面表现更好。
具体地,如图3所示,图中女人头巾部分纹理信息丰富,TVAL3和TVNLR重构图中均有块状伪影出现且头巾中的部分纹理信息丢失和被破坏,复原效果不是最佳。TF-CS方法结果图在结构和细节信息保留上表现相对较好,但是该复原图平坦区质量较差。本文方法重构图像质量最高,例如头巾和裤子上的纹理、女人的眼睛和鼻梁以及女人手部信息都被很好地复原出来。如图4中红色箭头所示,本文方法重构图像更好地保留和复原了白色墙壁和砖块等房子的重要信息,即使采样率较低(25%)时,重构图像的质量也比较可观。TVAL3和TVNLR重构图中有块状伪影出现,由于非局部先验信息的引入,一定程度上抑制了由TV模型的分片常数性引发的块状伪影污染现象,与TVAL3结果图相比,TVNLR结果图质量更好。类似地,如图5红色圆圈部分和图6虚线圆圈部分所示,本文方法结果图都能很好地重构出原始图像丰富的细节、结构及纹理等信息,如图3中帽檐、眼睛、鼻梁及肩膀信息,图6中相机、头发等信息,显然地,可以看出本文方法重构图像很好地抑制基于TV模型及其改进形式的压缩感知重构图像的块状或阶梯状伪影污染问题。
为了进一步验证本文方法的优越性,本文采用图像质量量化评价指标PSNR和VIF对四种压缩感知重构算法在不同情况下的结果图进行比较分析。其中,PSNR是峰值信噪比,主要衡量重构结果图的失真程度和噪声水平,PSNR值越大,重构图像劣化程度越小质量越好,反之,PSNR值越小,重构图像劣化程度越大质量越差。此外,VIF是测量重构图像与原始图像间视觉感知一致性的测度,主要从图像的结构信息保真程度这个角度来分析图像的特征,VIF值越大,重构图像与原始图像的视觉感知一致性越好,反之,VIF值越小,重构图像与原始图像的视觉感知一致性越差。
表1和表2分别给出了,当采样率分别为20%,30%,40%和50%时,分别采用TF-CS、TVAL3、TVNLR以及本文方法获得的压缩感知Barbara和House重构图像的PSNR值表现情况。可以发现,对于同一种算法,重构图像的质量随着采样率的增大而提高,即随着采样率增大,重构图像的PSNR值越来越大。通过比较不同算法,本文方法的综合表现都是最好的,即当采样率相同时,本文方法所获重构图像的PSNR值最大。进一步地,从量化角度说明,本文方法重构结果图失真和劣化程度较小,更好地复原了原始图像。
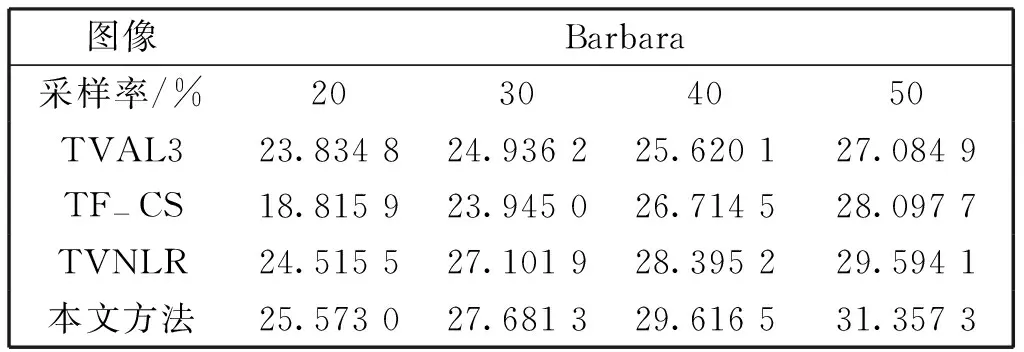
表1 不同算法Barbara复原图PSNR比较(单位:dB)
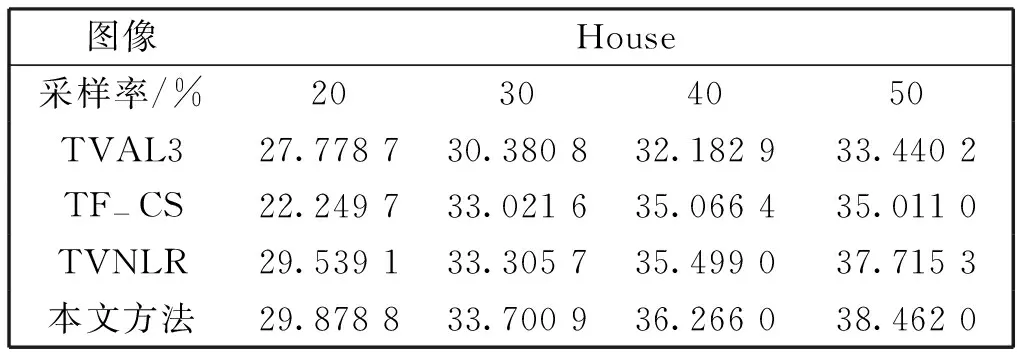
表2 不同算法House复原图PSNR比较(单位:dB)
表3和表4分别给出了当采样率分别为20%,30%,40%和50%时,采用TF-CS、TVAL3、TVNLR以及本文方法获得的压缩感知Barbara和House重构图像的VIF值表现情况。可以看出,对于同一种算法,重构图像的质量随着采样率的增大而提高,即随着采样率增大,重构图像的视觉信息保真度VIF值越来越大。通过比较不同算法发现,当采样率相同时,本文方法所获重构图像的VIF值最大。进一步地,从量化角度说明,本文方法重构结果图构图像与原始图像的视觉感知一致性越好,对原始图像的复原效果更加优异。
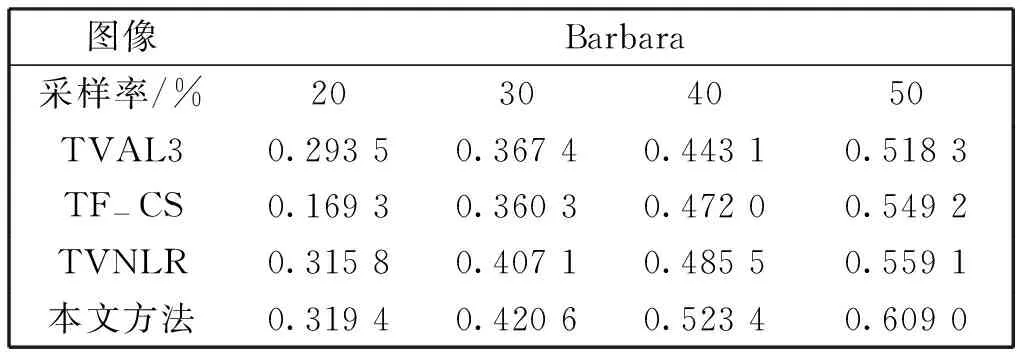
表3 不同算法Barbara复原图VIF比较
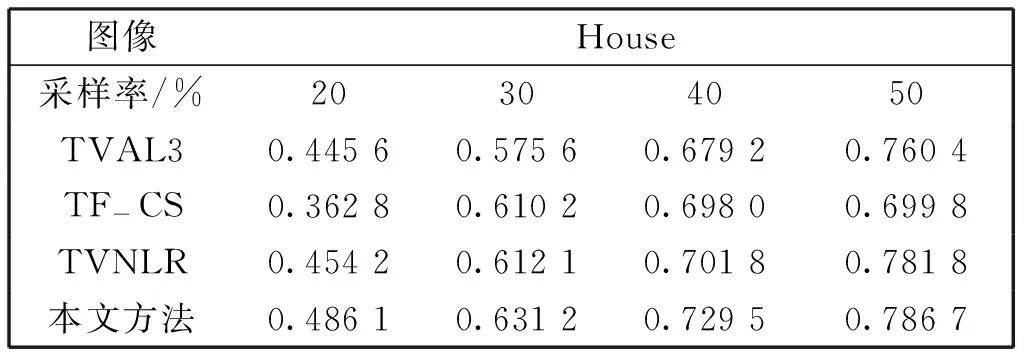
表4 不同算法House复原图VIF比较
4 结论
本文通过设计能够在克服TV模型的分片常数效应的同时,可以有效逼近纹理、结构及边缘等重要信息的稀疏正则项来解决全变分最小化方法在解决压缩感知图像复原问题时出现的纹理、细节信息丢失及阶梯状伪影污染问题。首先,构造由能够稀疏逼近纹理、结构等信息的紧支撑小波框架的L0范数和能够有效逼近分段平滑函数的全变分的L1范数组成的非光滑的能量泛函来准确表征图像先验信息;其次,通过引入辅助参数,采用增广拉格朗日方法将有约束的能量泛函优化问题转换为无约束的混合泛函最小化问题,并分别利用阈值法和最速下降法,交替求解目标函数分解出三个子问题。最后,通过与其他压缩感知图像复原算法进行仿真实验分析,不管从视觉效果还是从量化指标分析来看,本文方法不仅可以有效地重构原始图像,而且能够很好地保留纹理、结构、细节以及边缘等图像的重要信息,使得复原后的结果图更接近原始图像。因此,该算法的提出有助于基于压缩感知的图像复原技术作进一步的研究。
