水下噪声源可视化识别系统设计与实现
2018-09-03戚茜,陈航,周标
戚 茜, 陈 航, 周 标
水下噪声源可视化识别系统设计与实现
戚 茜, 陈 航, 周 标
(西北工业大学 航海学院, 陕西 西安, 710072)
水下可视化噪声源识别方法是一种有效的声场反演方法, 可直观地获得水下结构噪声源的空间分布情况。文中针对水中兵器的噪声源种类众多, 频谱成分复杂, 单一算法的噪声源识别系统无法同时满足实际工程应用的问题,运用LabVIEW虚拟仪器软件平台设计出一套将波束形成和近场声全息相结合的水下噪声源可视化识别系统。通过分析水下声场中传播波和倏逝波的声场分布与测量距离和辐射频率的关系, 得出了传播波和倏逝波在水下声场中的变化规律, 确定了可利用的倏逝波传播距离。研究了不同测量距离、辐射频率和阵列尺寸条件下, 适用的可视化噪声源识别方法。实现了传声器阵列各通道标定校准、数据采集、声场波束指向特性、声场重构数据分析及不同频段上噪声源的可视化实验研究。实验结果验证了该系统的有效性, 满足实际工程应用。
水下噪声源识别; 可视化; 波束形成; 近场声全息
0 引言
积极开展水中兵器噪声源定位识别技术研究, 获得水中兵器噪声源的空间分布, 就可以有针对性地指导水中兵器的声学设计和减振降噪措施的正确实施, 是提高水中兵器隐身性最有效最直接的手段, 因此具有重要的工程应用意义。
随着噪声源识别技术的不断提高, 水下噪声源定位识别实现了可视化[1]。国内外在上世纪八九十年代起开展该领域研究, 尤其近些年来采用常规波束形成[2-3]、近场声全息[4-7]、聚焦波束形成[8]、解卷积波束形成[9]以及广义逆波束形成[10]等算法及其相应的识别系统完成声场可视化或噪声源识别定位都有较丰富的研究成果。但是, 由于水中兵器的噪声源种类众多, 频谱成分复杂, 单一算法的噪声源识别系统无法同时满足实际工程应用。由结构受力源激励产生的机械噪声主要集中在低频段, 适用近场声全息方法; 而螺旋桨旋转产生的噪声包括螺旋桨空化噪声和螺旋桨叶片振动噪声, 其中, 空化噪声往往是水中兵器辐射噪声高频段的主要成分[11], 波束形成算法更为适用。因此, 文中考虑设计出一套将波束形成和近场声全息相结合的水下噪声源可视化识别系统, 以便同时实现不同频段上的噪声源识别。
随之而来的可视化噪声源识别方法的适用范围问题需进一步探讨。在波的传播过程中倏逝波和传播波是共存的。近场声全息主要利用倏逝波携有目标结构的空间频率信息的特点, 得到高分辨率图像, 因此, 需要研究水下倏逝波的有效传播距离。邓江华等[12]研究了空气中传播波和倏逝波的分布规律。不同于空气中的声场, 水下辐射声波的声速较大、波长较长。文中通过分析水下声场中传播波和倏逝波的声场分布与测量距离和声源频率的关系, 得出了传播波和倏逝波在水下声场中的变化规律, 确定了可利用的倏逝波传播距离。研究了不同测量距离、辐射频率和阵列尺寸条件下, 适用的可视化噪声源识别方法。运用LabVIEW虚拟仪器软件平台设计出了一套基于波束形成和近场声全息相结合的水下噪声源可视化识别系统, 实现了传声器阵列各通道标定校准、数据采集、声场波束指向特性、声场重构数据分析及不同频段上噪声源的可视化等, 为后续的降噪措施提供依据。
1 水下声场中声波传播规律
1.1 传播波和倏逝波
根据偏微分方程理论, 在直角坐标系下Helmholtz方程具有如下形式的一般解



它是一个纯虚数。将其代入式(2), 可推导得


式中

1.2 倏逝波有效传播距离


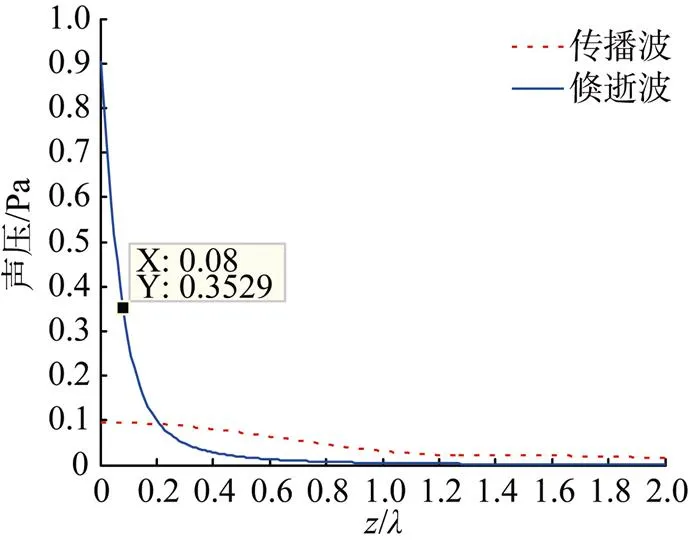
图1 倏逝波和传播波幅值随距离变化曲线

图2 倏逝波和传播波幅值随频率变化曲线
1.3 可视化噪声源识别方法适用范围
2 水下噪声源可视化识别系统设计与实现
基于LabVIEW的水下噪声源可视化识别系统采用模块化构建, 便于实行功能模块的拓展,由标定、数据采集以及数据分析等模块构成, 系统模块结构框图如图4所示。

图3 理论模型搭建示意图

图4 系统软件模块框图
2.1 硬件系统设计
系统硬件主要是用于对信号的采集、保存、处理和显示等。系统硬件结构框图如图5所示。

图5 系统硬件结构框图
2.2 软件系统设计
按软件系统的功能, 主要编写了声压采集软件和算法处理2个软件。
1) 声压采集软件
利用LabVIEW驱动数据采集卡采集数据并将数据存储。声压采集软件按设定好的采集参数进行声场数据采集, 当数据采集完成时, 文件保存软件会自动保存数据。
2) 算法处理软件
系统采用LabVIEW和MATLAB共同开发,在LabVIEW中调用MATLAB, 算法处理软件把各类阵型的波束形成算法和近场声全息算法移植到了软件内部。
2.3 水下噪声源可视化识别系统界面设计
可视化噪声源识别系统的界面如图6所示。界面左边是实验参数设置区域, 包括噪声源识别方法、传感器阵列类型、位置、目标的频率信息和采样频率等, 噪声源识别方法实现常规波束形成和近场声全息等可选, 传感器阵列类型实现线列阵、矩形平面和十字阵列等可选; 中间部分是信号的时域和频域波形显示的区域, 实现传感器校准和数据采集区域可选; 界面右边是结果显示区, 若噪声源识别方法为波束形成类的, 可实现阵列示意图、指向性和重建图像可选功能, 若噪声源识别方法为声全息类的, 可实现阵列示意图、全息图像和重建图像可选功能。

图6 水下噪声源可视化识别系统界面
3 水下噪声源可视化识别系统实验结果
依托西北工业大学水下信息处理与控制国家重点实验室的消声水池进行了水下噪声源可视化识别系统的实验研究。实验设备主要包括声源、多通道采集系统PXI、图形界面显示PC机、各种阵形的传感器阵列、传感器支架, 以及各个设备之间连接的数据线等。把多路数据采集端口通过BNC接头, 连接到PXI采集机箱的2个NI PXIe-4496采集模块插槽上。采集机箱连接在PC上。实验设备放置示意图如图7所示。
3.1 常规波束形成算法成像结果
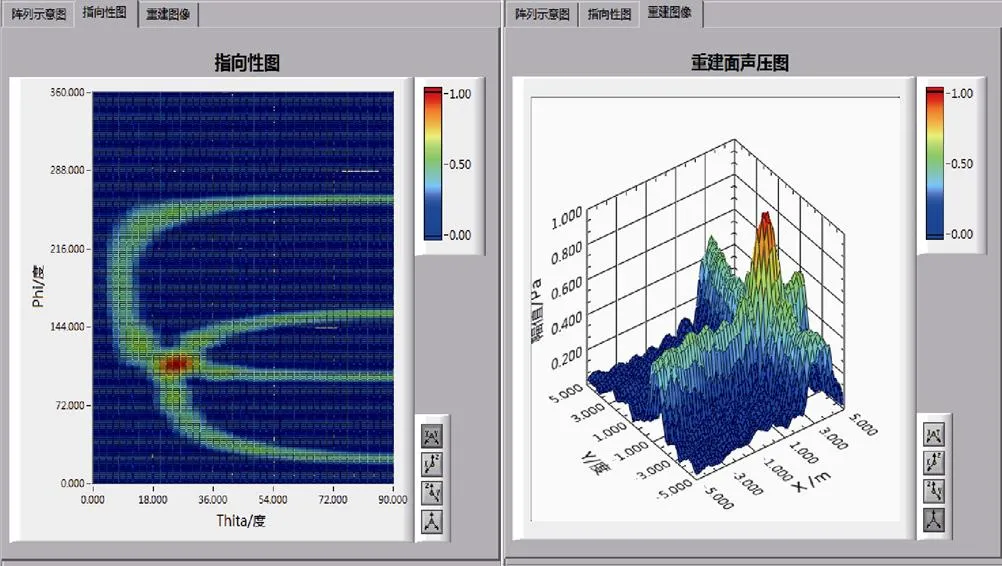
图8 常规波束形成指向性图和声压重建图
3.2 近场声全息方法成像结果
4 结束语
通过分析水下声场中传播波和倏逝波的声场分布与测量距离和辐射频率的关系, 得出了传播波和倏逝波在水下声场中的变化规律, 确定了可利用的倏逝波传播距离。研究了不同测量距离、辐射频率和阵列尺寸条件下, 适用的可视化噪声源识别方法。
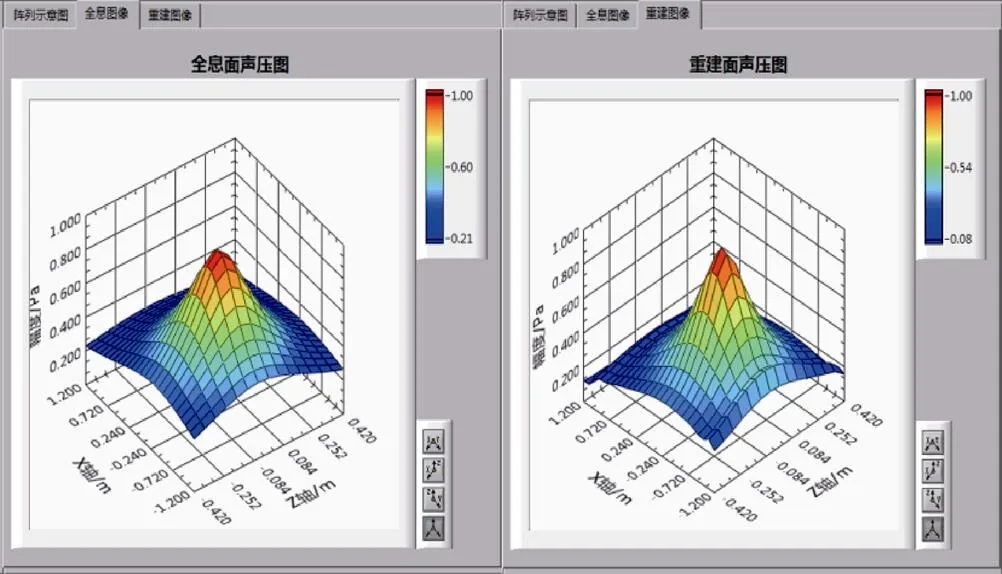
图9 近场声全息全息面和重构面上声压幅值分布图
运用LabVIEW软件平台设计水下可视化噪声源识别系统。实现了传声器阵列各通道标定校准、数据采集、声场波束指向特性或全息面复声压特性、声场重构数据分析及不同频段上的噪声源的可视化等。实验结果验证了该系统的有效性, 满足实际工程应用。
[1] 李加庆, 陈进, 张桂才, 等. 可视化噪声源识别技术[J]. 声学技术, 2007, 26(1): 90-95. Li Jia-qing, Chen Jin, Zhang Gui-cai, et al. Visualization for Noise Sources Identification[J]. Technical Acoustics, 2007, 26(1): 90-95.
[2] Blacodon D, Caplot M, Elias G. Source Location Techniques for Impulsive Multiple Sources[J]. Journal of Aircraft, 1989, 26(2): 154-156.
[3] Ompton R T. A Numerical Pattern Synthesis Algorithm for Arrays[J]. IEEE Transactions, 1990, 38(10): 1666-1676.
[4] Maynard J D, William E G. Near-field Acoustic Holography I. Theory of Generalized Holography and the Development of NAH[J]. Journal of the Acoustical Society of America, 1985, 78(4): 1395-1413.
[5] Veronesi W A, Maynard J D. Nearfield Acoustic Holography(NAH) II. Holographic Reconstruction Algorithms and Computer Implementation[J]. Journal of the Acoustical Society of America, 1987, 81(5): 1307-1322.
[6] 李青, 毕传兴, 徐亮. 基于LabVIEW的近场声全息噪声源识别系统[J].噪声与振动控制, 2010, 30(6): 140-144. Li Qing, Bi Chuan-xing, Xu Liang. Near-Field Acoustical- Holography Noise-Source-Identification System Based on LabVIEW[J]. Noise and Vibration Control, 2010, 30(6): 140-144.
[7] Li J Q, Chen J. Yang C, et al. A Sound Field Visualization System Based on the Wave Superposition Algorithm[J]. Journal of Mechanical Engineering Science, 2008, 222(8): 1403-1412.
[8] 时洁, 杨德森. 基于矢量阵宽带MVDR聚焦波束形成的水下噪声源定位方法[J]. 信号处理, 2010, 26(5): 687-694.Shi Jie, Yang De-sen. Localization of Underwater Noise Sources based on Broadband MVDR Focused Beam- forming with Vector Sensor Array Processing[J]. Signal Processing, 2010, 26(5): 687-694.
[9] 盛朝阳. 水下结构噪声源解卷积定位方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2014.
[10] 叶虹敏, 王强, 袁昌明, 等. 基于广义逆波束形成的扩展性噪声源定位误差影响因素仿真研究[J]. 声学技术, 2015, 34(4): 368-373.Ye Hong-min, Wang Qiang, Yuan Chang-ming, et al. Simulation Research on Error Influence Factors Extended Acoustic Sources Identification Based on Generalized Inverse Beamforming[J]. Technical Acoustics, 2015, 34(4): 368-373.
[11] 刘伯胜. 水声学原理[M].哈尔滨: 哈尔滨工程大学出版社, 2010.
[12] 邓江华, 刘献栋, 单颖春. 传播波与倏逝波对全息重建影响的研究[J]. 声学技术, 2009, 28(5): 565-571.Deng Jiang-hua, Liu Xian-dong, Shan Ying-chun.Research on Evanescent Wave and Propagation Wave in Sound Field and the Improved Acoustic Holography Method[J]. Technical Acoustics, 2009, 28(5): 565-571.
[13] Johnson D H. The Application of Spectral Estimation Methods to Bearing Estimation Problems[J]. Proceedings of the IEEE, 1982, 70(9): 1018-1028.
[14] 滕舵, 杨虎, 李道江. 水声换能器基础[M]. 西安: 西北工业大学出版社, 2016.
(责任编辑: 陈 曦)
Design and Implementation of Visualized Underwater Noise Source Recognition System
QI Qian, CHEN Hang, ZHOU Biao
(School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, China)
visualized underwater noise source recognition method is an effective acoustic field inversion, which can directly obtain the spatial distribution of underwater structural noise sources. Aiming at the problem that there are many kinds of noise sources and complex spectrum components of underwater weapons, the noise source recognition system based on a single algorithm can’t satisfy the practical engineering application simultaneously, a visualized recognition system of underwater noise sources is designed by combining beamforming and near-field acoustic holography on the virtual instrument software platform LabVIEW. By analyzing the relationships of the distribution of propagation wave and evanescent wave in underwater acoustic field with the measured distance and the radiation frequency, the variation rule of the propagation and evanescent waves in underwater acoustic field is obtained, and the evanescent wave propagation distance is hence determined. The visualized noise source recognition method is studied under different measurement distance, radiation frequency and array size. Visualization experiment of noise source recognition is conducted in terms of channel calibration, data acquisition, sound field beam directivity, sound field reconstruction data analysis, and noise source visualization on different frequency bands. The experimental results verify the effectiveness of the present system, which implies that the system is applicable to practical engineering.
underwater noise source recognition; visualization; beamforming; near-field acoustic holography
O422.2; TB52.5
A
2096-3920(2018)04-0324-06
10.11993/j.issn.2096-3920.2018.04.008
戚茜, 陈航, 周标. 水下噪声源可视化识别系统设计与实现[J]. 水下无人系统学报, 2018, 26(4): 324-329.
2018-02-05;
2018-05-24.
国家自然科学基金(61701529)、航天科学技术基金( N2017KC0131).
戚 茜(1981-), 女, 在读博士, 助理研究员, 主要研究方向为声场分析、信号与信息处理等.